抗差自適應Kalman濾波及其在GNSS導航中的應用
2016-11-07 06:05:46王國棟
河北工程大學學報(自然科學版) 2016年3期
鄒 敏,王國棟,劉 超
(1.安徽理工大學 測繪學院,安徽 淮南232001;2.浙江有色測繪院,浙江 紹興312000)
?
抗差自適應Kalman濾波及其在GNSS導航中的應用
鄒 敏1,王國棟2,劉 超1
(1.安徽理工大學 測繪學院,安徽 淮南232001;2.浙江有色測繪院,浙江 紹興312000)
針對Kalman濾波易受粗差影響而導致結果失真的問題,提出一種抗差自適應Kalman濾波方法,該方法結合自適應濾波與抗差Kalman濾波的優點,同時設計自適應因子和抗差因子,采用改進的兩段Huber函數與2~3倍的觀測噪聲中誤差來充當抗差因子與粗差判別標準。并對Kalman濾波和抗差自適應濾波(Adaptive Robust Kalman Filtering, ARKF)結果進行比較。車載實驗結果表明,ARKF可以有效抵制觀測異常對狀態估值的影響,同時在系統先驗信息不能精確給出的情況下,顯著改善了濾波估值的穩定性和可用性。
Kalman濾波;粗差;抗差自適應Kalman濾波;GNSS
Kalman濾波(Kalman Filtering,KF)在GPS導航領域已得到了廣泛的應用,只要給出正確的噪聲特性,KF將給出濾波狀態的最優估計。事實上,動力學模型給出的先驗信息不足以表征載體真實的運動狀態。這樣給出的KF估計值不再是最優估計值,甚至可能導致濾波發散[1-2]。同時,隨著導航衛星系統諸如GLONASS、Galileo、我國北斗二代等的不斷加入,粗差發生的幾率必將不斷增加。這些都是導致KF結果失真的原因,無法滿足高精度GNSS導航的需要。針對KF存在的問題,很多學者對其做了一些改進,主要集中在以下幾方面:自適應濾波[3-5](Adaptive Kalman Filtering,AKF)、抗差Kalman濾波[6-9](Robust Kalman Filtering,RKF)[10-12]、抗差自適應Kalman濾波[13-14]( Adaptive Robust Kalman Filtering,ARKF)。此外,為了獲得正確的系統狀態估計,許多學者還提出了以擴展Kalman濾波[15]、無跡Kalman濾波[16]、小子域濾波[17]等為例的非線性濾波方法。現有的ARKF的文獻中抗差和自適應因子較多采用三段函數,粗差判斷標準也是根據經驗值,這有可能導致觀測噪聲或狀態噪聲協方差陣奇異,得不到最優的濾波估值。因此,本文采用改進的兩段Huber函數來設計抗差因子,粗差判別標準采用2~3倍的觀測噪聲中誤差,充分利用當前觀測信息。對不同速度譜密度情況下的Kalman濾波和抗差自適應濾波進行比較,同時對加入粗差前后的KF和ARKF也進行比較。
1 Kalman濾波
給定離散化的線性動力學系統方程和觀測方程:
(1)
式中,xk表示第k歷元n×1階狀態向量;φk,k-1為n×n階狀態轉移矩陣;wk為n×1階系統隨機過程噪聲向量;zk表示m×1階觀測向量;Hk是m×n階設計矩陣;vk為m×1階隨機觀測噪聲向量。
設Pk為殘差向量的協方差矩陣,Qk和Rk分別為噪聲向量wk和vk的協方差陣,則Kalman濾波的遞歸過程如圖1所示。其中,+表示濾波估計值;-表示預測值。
2 抗差自適應Kalman濾波
2.1抗差因子模型
抗差因子的確定基于等價權原理,即通過權函數構造抗差因子,對存在粗差的觀測值進行降權處理,降低異常觀測在參數估計中的份額。為了克服判別條件采用經驗值的盲目性,充分利用當前觀測信息,對Huber權函數的判別條件進行改進:
(2)
式中,c取2σ~3σ0(σ0為觀測噪聲的中誤差)。而
(3)

(4)

2.2自適應因子模型
自適應因子模型[18]分為歸零函數和非歸零降函數。所謂歸零函數,即當判別統計量大于某個極值時,自適應因子為零;而非歸零降函數指的是,自適應因子隨著判別統計量增大而下降,但不為零。為了防止自適應因子取零情況下預測狀態協方差陣奇異,本文選取了類似于Huber函數的兩段函數自適應因子:
(5)
式中,k為常數,k=1.0~2.5;Δxk為狀態不符值統計量。


式中,Q′為速度的譜密度。
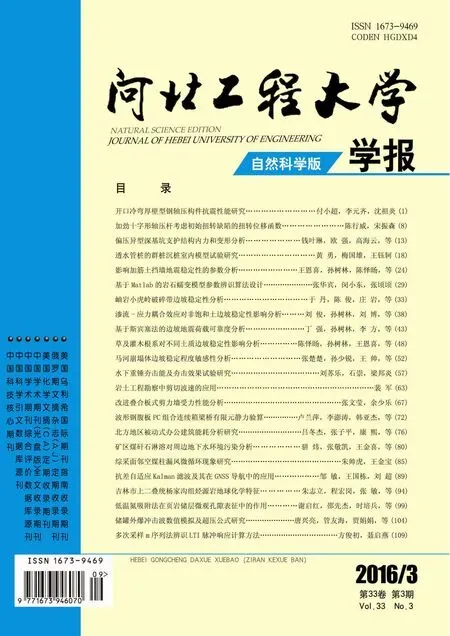
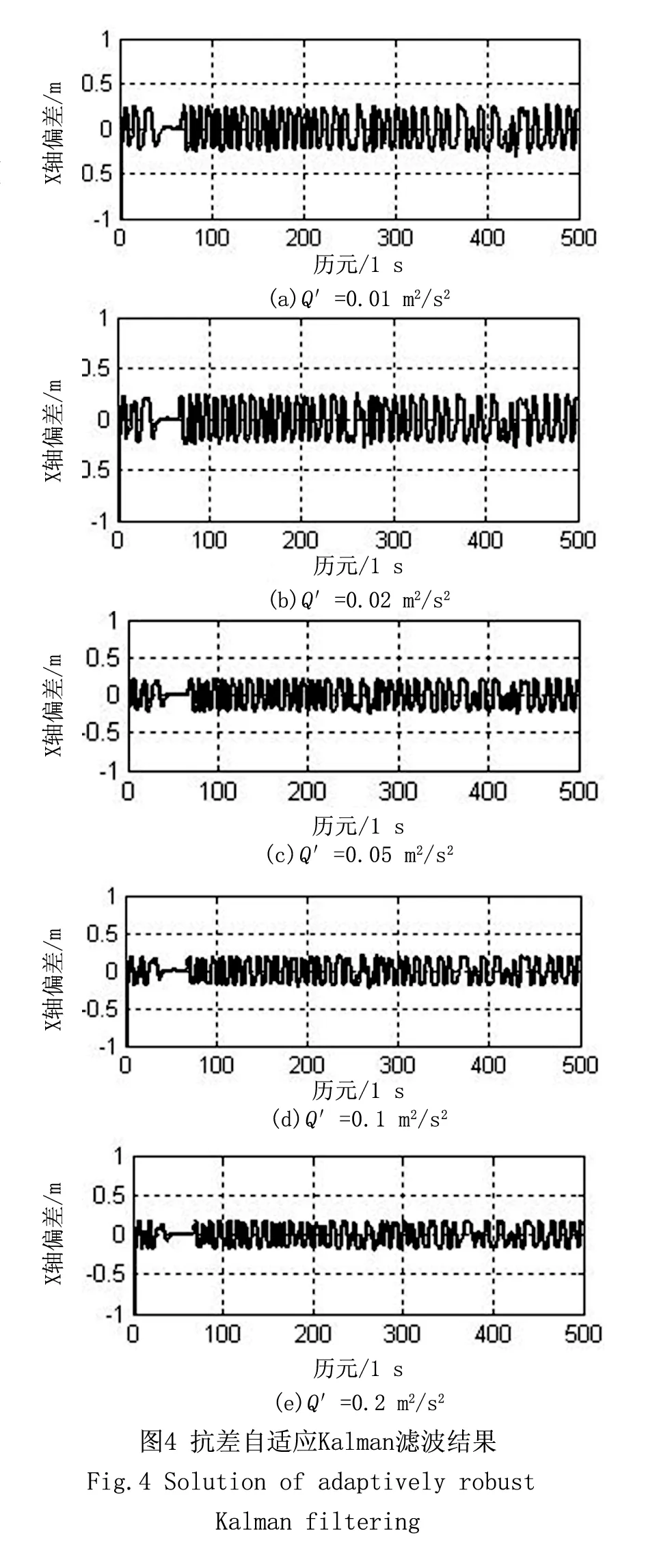
將位置的初始方差固定為0.2m2,分別選取不同的速度譜密度0.01、0.02、0.05、0.1和0.2m2/s2,比較Kalman濾波和抗差自適應濾波的濾波效果,如圖3、4所示;給GPS的17號衛星的100、200和300歷元的C/A碼觀測值分別人為加入20、40和60m的粗差,檢驗Kalman濾波和抗差自適應濾波的濾波效果,如圖5、6所示。由于Y軸和Z軸的濾波結果與X軸的類似,因此討論不同濾波結果在X軸方向上的變化即可說明問題。
從圖3可以看出,隨著速度譜密度的不斷增大,KF的效果越來越好,這說明只要給出較正確的系統狀態噪聲,KF可以給出較高的濾波估值精度,由于初值賦值的盲目性,這種濾波估值精度很難保證。在未能正確給出系統狀態噪聲(如Q′=0.01m2/s2)的情況下,曲線變化比較劇烈,濾波殘差大部分都超過了2m,有的甚至達到了5m,這已經不能滿足高精度實時GNSS導航的需要。
從圖4可以看出,隨著速度譜密度的不斷增大,ARKF的效果比較穩定,殘差曲線變化也越來越和緩,但總體變化不大,這說明ARKF已經不那么依賴系統狀態噪聲初值的精度,真正做到了自適應,同時也有效抵制了系統模型誤差對濾波結果的不良影響。同時,濾波殘差都在0.5m以內,可以滿足高精度GNSS導航的需要。
由圖5可知,當觀測值含有粗差時,KF結果在100、200、300歷元嚴重失真,已無法進行正常的導航。粗差越大,濾波結果越遠離真實值。且由于模型誤差的存在,KF的效果并不好,殘差曲線波動范圍較大,說明濾波器并不處于穩定狀態。
相較于圖5而言,在加粗差前后,圖6的殘差曲線波動范圍較小,殘差都在0.5m以內,有效地抑制了粗差觀測值對狀態估值的影響,說明該濾波器具有較好的穩定性和良好的適應性,能滿足高精度實時GNSS導航的需要。同時,ARKF有效抑制了系統模型誤差對濾波結果的影響,提高了濾波的精度。

4 結論
與經典的Kalman濾波結果進行實例對比分析,驗證了本文推導的抗差自適應Kalman濾波及其算法的有效性與優越性。抗差自適應Kalman濾波可以有效地抑制系統模型誤差,以及觀測粗差對狀態估值的影響,降低不良觀測影響,提高濾波精度。
[1]李增科,王 堅,高井祥,等.利用SVM的GPS/INS組合導航濾波發散抑制方法研究[J].武漢大學學報:信息科學版,2013,38(10):1216-1220.
[2]李 沖,黃觀文,譚 理,等.抗差自適應卡爾曼濾波在GPS精密單點定位中的應用[J].測繪科學,2011,36(4):22-23.
[3]MOHAMED A H,SCHWARZ K P.Adaptive Kalman filtering for INS/GPS[J].Journal of geodesy,1999,73(4):193-203.
[4]GE Linlin,CHEN Hongyue,HAN Shaowei,et al.Adaptive filtering of continuous GPS results[J].Journal of Geodesy,2000,74(7-8):572-580.
[5]YANG Yuanxi,GAO Weiguang.An optimal adaptive Kalman filter[J].Journal of Geodesy,2006,80(4):177-183.
[6]余學祥,呂偉才.GPS監測網動態數據處理抗差Kalman濾波模型[J].中國礦業大學學報,2000,29(6):553-557.
[7]許長輝,高井祥,胡 洪,等.精密單點定位的抗差卡爾曼濾波研究[J].中國礦業大學學報,2012,41(5):857-862.
[8]苗岳旺,周 巍,田 亮,等.基于新息χ2檢測的擴展抗差卡爾曼濾波及其應用[J].武漢大學學報:信息科學版,2016,41(2):1-5.
[9]聶建亮,張雙成,徐永勝,等.基于抗差Kalman 濾波的精密單點定位[J].地球科學與環境學報,2010,32(2):218-220.
[10]HUBER P J.Robust statistics[M].New York:John Wiley,1981.
[11]HAMPEL F R,RONCHETTI E M,ROUSSEEUW P J,et al.Robust statistics[M].New York:John Wiley,1986.
[12]楊元喜.抗差估計理論及其應用[M].北京:八一出版社,1993.
[13]YANG Yuanxi,HE Haibo,XU Guochang.Adaptively robust filtering for kinematic geodetic positioning[J].Journal of Geodesy,2001,75(2-3):109-116.
[14]吳富梅,楊元喜.一種兩步自適應抗差Kalman濾波在GPS/INS 組合導航中的應用[J].測繪學報,2010,39(5):522-527.
[15]謝先明.一種基于擴展卡爾曼濾波的多基線相位噪聲抑制及展開方法[J].測繪科學,2015,40(2):43-47.
[16]王 仁,趙長勝,夏志浩,等.無跡卡爾曼濾波衰減記憶算法研究[J].測繪通報,2015(12):20-22.
[17]蔡 鐘,倪小東.重力異常處理中小子域濾波法的改進[J].河北工程大學學報:自然科學版,2015,32(4):47-51.
[18]楊元喜,任 夏,許 艷.自適應抗差濾波理論及應用的主要進展[J].導航定位學報,2013,1(1):9-15.
[19]SCHWARZ K P,CANNON M E,WONG R V C.A comparison of GPS kinematic models for the determination of position and velocity along a trajectory[J].Manuscripta Geodaetica,1989,14(6):345-353.
(責任編輯王利君)
Adaptive robust Kalman filtering and its application in GNSS
ZOU Min1,WANG Guodong2,LIU Chao1
(1.School of Geodesy and Geomatics,Anhui University of Science and Technology,Anhui Huainan,232001,China;2.The Youse Surveying and Mapping Institute of Zhejiang,Zhejiang Shaoxing,312000,China)
The Kalman filtering is easily affected by the gross error and it will cause larger distortion of the result. To overcome this problem, an adaptive robust Kalman filtering was proposed. It combines the advantages of adaptive Kalman filtering and robust Kalman filtering by using the adaptive factor and the robust factor. And the improved two segments Huber function was designed as the robust factor, the two to three times observation noise error was designed as the gross error determination standard respectively. Compared the result of Kalman filtering and adaptive robust Kalman filtering, the latter could effectively resist the influence of abnormal observation to the state estimation, and can improve the stability and availability of the filtering estimation significantly.
KF;gross error;ARKF;GNSS
2016-04-20
國家自然科學基金資助項目(41404004);安徽省自然科學基金資助項目(1408085QD72);安徽理工大學科研啟動基金資助項目(11152)
鄒敏(1992-),女,安徽滁州人,碩士,從事GNSS數據處理的研究。
1673-9469(2016)03-0089-05
10.3969/j.issn.1673-9469.2016.03.019
P228
A
猜你喜歡
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
測控技術(2018年12期)2018-11-25 09:37:34
江西建材(2018年4期)2018-04-10 12:37:38
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
電源技術(2016年9期)2016-02-27 09:05:39
衛星與網絡(2015年12期)2015-10-27 02:21:46
電源技術(2015年1期)2015-08-22 11:16:28