基于語音識別的雙足機器人行走控制系統設計
2016-11-09 19:11:34陳益吳寶春孟歡韓飛王慧磊
物聯網技術 2016年9期
陳益+吳寶春+孟歡+韓飛+王慧磊
摘 要:文中詳細介紹了雙足機器人行走控制系統的設計與實現方法。本系統以STM32控制器為核心,應用三軸加速度傳感器、語音傳感器模塊及舵機控制器實現對雙足機器人行走的控制;通過三軸加速度傳感器實現機器人行走過程中質心軌跡信息的采集,并將相應的質心軌跡信息作為舵機控制的反饋信號,從而實現機器人按照特定語音實現多種姿態的平穩運行。
關鍵詞:雙足機器人;語音控制;質心軌跡;STM32
中圖分類號:TP242 文獻標識碼:A 文章編號:2095-1302(2016)09-0051-02
0 引 言
科學技術的發展日新月異,近百年來發展起來的機器人如今已風靡全球,并滲透到各行各業,時刻影響著我們的生活。機器人由于具有良好的市場發展前景和重大的科學研究利用價值,使得全世界的國家都在這一熱門領域中投入了大量的人力、物力以及財力。我國作為世界上第一大機器人消費市場,對這一智能化領域十分重視。我國正制定機器人產業“十三五”發展規劃,推進全國機器人產業的健康發展。
雙足機器人是機器人研究中的一個熱門方向。它模仿人類的行走方式,通過對自身的雙腳進行類似運動從而達到行走的目的。在近十年的發展過程中,雙足機器人的研究發展迅猛,如2015年的全國機器人大會上那些能獨立行走、與人交談的各類機器人;日本軟銀大會上與人互動的“Pepper”機器人等。這些機器人都標志著人們對機器人的無限熱情與期待,智能化時代已經到來,人類的明天會更加美好。
本文主要針對雙足機器人行走控制進行了分析與研究,以STM32控制器為核心,采用三軸加速度傳感器檢測行走過程的質心軌跡信息,通過信息反饋及時矯正行走姿態;結合語音傳感器實現對特定語音的識別,從而控制雙足機器人實現多種運行狀態;多傳感器數據融合技術的應用,提高了整個系統的可靠性,保證了雙足機器人平穩的運行姿態。
1 系統硬件設計
由于人們如今的生活水平和思想境界都在不斷提高,這使得事物的可視化、直觀展現成為必要。因此,通過傳感器完成數據采集,經各模塊互相通信,由微處理器進行處理,以視覺的形式展現某些結果,最終形成人機交互便成為研究設計的一大趨勢。
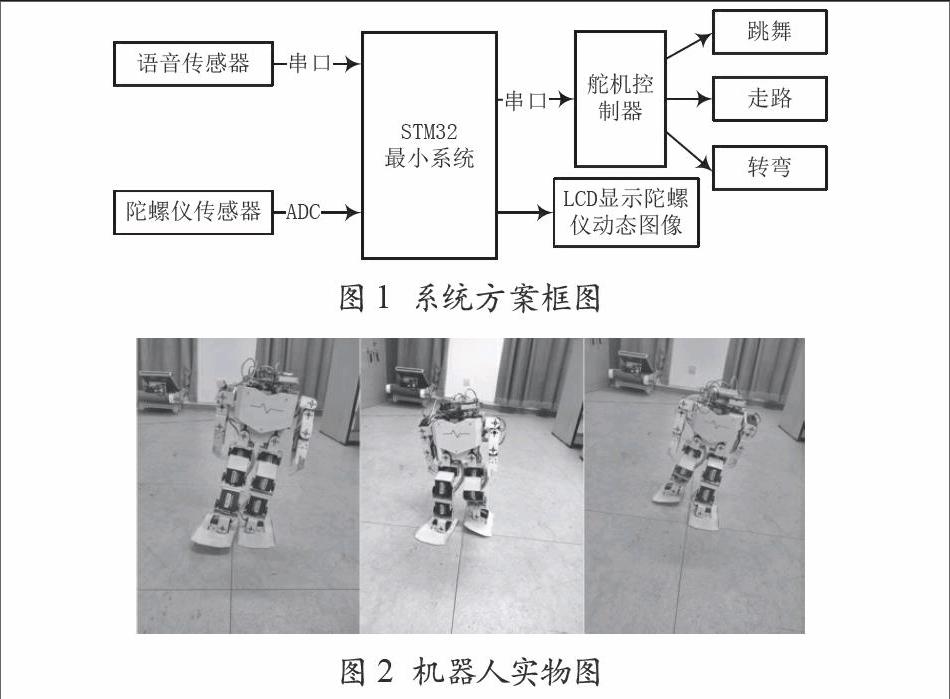
本文控制系統主要由核心控制器STM32模塊、傳感器(加速度傳感器和語音傳感器)、信號采集模塊、舵機控制器以及液晶顯示組成。利用STM32自帶的兩個串口功能分別與語音傳感器和舵機控制器通信,實現語音識別及舵機控制等功能。通過其自帶的ADC轉換模塊對三軸加速度傳感器的數據進行采集、分析與處理,將其質心軌跡以圖形化的形式顯示到LCD上,并將相應的質心軌跡信息作為舵機控制的反饋信號,根據質心軌跡的狀態,通過舵機控制器及時調整舵機運行狀態,保證機器人的平穩運行,實現了對機器人姿態的實時監控。系統方案框圖如圖1所示,實物圖如圖2所示。
2 質心軌跡檢測
本文采用高精度三軸加速度傳感器MMA7361L實現角度測試,其核心算法是建立輸出電壓和角度之間的函數映射關系。以MMA7361L傳感器X軸方向的傾角計算為例,取傳感方向X軸與重力加速度g垂直時的狀態為零傾斜角度,當傾角為θ時,X軸方向傾角測量原理圖如圖3所示。
傳感X軸方向的重力加速度分量g (θ)=g·sin(θ),當θ→0時,有:
(1)
從上式可以看出,當傾斜角θ為一個小角度時,其角度的變化率(即導數)越大并趨向于g時有助于提高小角度測量的分辨率。因此該零傾斜角度的選擇方式有助于小角度的精確測量。由于傳感器的加速度分量與其電壓成正比,且精度是800 V/g,因此傾角為:
(2)
因此,我們通過三軸加速度傳感器可以對雙足機器人的運動質心狀態進行監控。
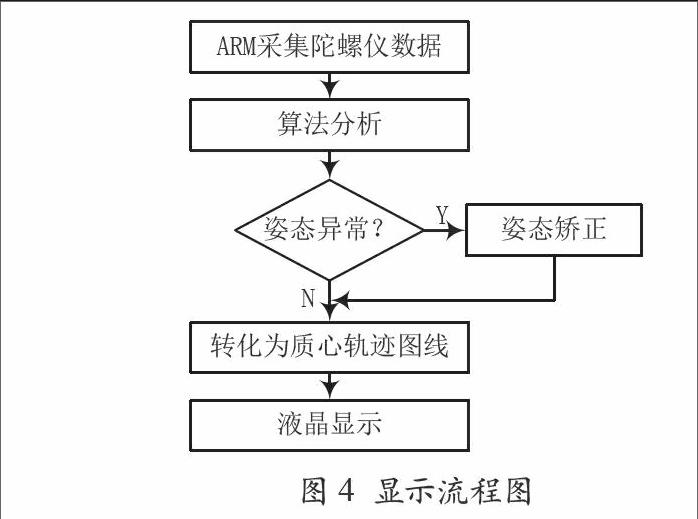
首先通過ARM處理器對MMA7361L模塊進行數據采集,然后將數據存儲在ARM的內存中,并取多次平均值以保證其正確性,將結果代入公式(2)對角度進行換算,并將檢驗結果與最大質心偏離角對比,若大于該值,則讓ARM發送矯正指令,使機器人停止運動,返回上一姿態,以保證其穩定性。與此同時,通過相應的變換將角度值變換為LCD坐標數據。因為LCD已提前建立以時間為X軸,偏離角為Y軸的坐標軸,將數據填充進去后,反復多次便可得到機器人行走過程中的質心軌跡圖。
3 語音控制
人類與機器進行語音交流,讓其明白我們的意圖并給予回應,這是人類夢寐以求的事情,也是科學進步發展的趨勢。要讓機器人聽懂人類的意思,就需要一個“聽覺系統”,即語音識別。
本文采用語音識別集成控制模塊ASRM08-A,該模塊包含語音采集、前級處理、語音訓練、語音識別、語音輸出等電路,具有體積小、操作簡單、識別度較高、串口通信等優點。其基本原理如圖5所示,將外部語音信號通過ADC進行采集,然后進行一系列的處理,通過線性預測(LPC)參數提取出其相應的特征,之后將提取的語音特征矢量參數與參考模式庫中的模式進行相似性度量比較,并結合一定的判別規則和專家知識得出最終的識別結果,以呈現好的人機交互界面。
本文通過ASR M08-A模塊對外界環境產生的語音信號進行監控。當外界有“走路”、“跳舞”之類的特定語音信號產生時,模塊就會接收這個語音信號并進行采集、特征提取、比較與匹配。其內部可以人為的存儲一些語音指令信息,若該語音信號與初始設置的語音指令一致時,如01,zou lu,001,$表示若收到“走路”這條語音信息后,便通過串口發送數據“01”作為標志,提示用戶外界的語音信息是“走路”。所以此時其自帶的串口便輸出一個對應的值, ARM處理器檢測串口接收的數據信息,分析判斷后執行相應的指令,讓機器人做出相應的動作。
4 結 語
本文研究了一種以ARM處理器、三軸加速度傳感器和舵機控制器為一體的機器人系統控制方法,通過對雙足機器人的行走步伐進行規劃并以質心軌跡為反饋信號來檢測相應的行走狀態,最終以人性化語音指令來控制雙足機器人進行穩定行走。實驗結果表明,質心軌跡檢測方法能讓雙足機器人按照特定的語音實現較為穩定的運行,具有一定的市場價值和實用性,為后續雙足機器人控制的深入研究打下了堅實的基礎。
參考文獻
[1]鐘新華,蔡自興,鄒小兵.移動機器人運動控制系統設計及控制算法研究[J].華中科技大學學報(自然科學版),2004,32(S):133-136
[2]李玉娟.基于STM32的變電站巡檢機器人運動控制系統設計與實現[D].成都:西南交通大學,2013.
[3]常加營,劉國棟.一種類人機器人控制系統的設計[J].計算機應用與軟件,2012, 29(11):302-304,333.
[4]郭天祥.51單片機典型系統開發實例精講[M].北京:電子工業出版社,2009.
[5] Richard Barnett.嵌入式C編程與Atmel AVR[M].北京:清華大學出版社,2003.
[6]申鐵龍.機器人魯棒控制基礎[M].北京:清華大學出版社,1999.
[7]霍偉.機器人動力學與控制[M].北京:高等教育出版社,2005.
[8]蘇曉東,羅慶生,李華師,等.仿生四足機器人控制系統設計[J].機械設計與制造,2013(2):16-19.
(下轉第頁)
(上接第頁)
[9]錢慶文.基于STM32的類人機器人控制系統的研究[D].哈爾濱:哈爾濱理工大學,2014.
[10] Richard Barnett.嵌入式C編程與Atmel AVR[M].北京:清華大學出版,2003.
[11] Shihong DING,Shihua LI,Qi LI.Stability analysis for a second-order continuous finite-time control system subject to a disturbance[J].Journal of Control Theory and Applications,2009,7(3):271-276.