基于元胞自動機(jī)的行人和車輛疏散機(jī)理研究
2016-11-09 22:38:29姚層林左傳
數(shù)字技術(shù)與應(yīng)用 2016年9期
姚層林 左傳
摘要:近年來,城市經(jīng)濟(jì)水平飛速發(fā)展,對城市交通的發(fā)展起著支柱作用,使得城市交通設(shè)施不能完全與不斷增加的汽車保有量相適應(yīng),城市交通問題日趨明顯。路口人行橫道處行人和車輛之間的相互干擾日益增強(qiáng),以致整個(gè)路口的運(yùn)行效率下降,此外,交通設(shè)施的不夠完善從一定程度上造成了行人違規(guī)的不利后果,給行人和車輛帶來巨大的安全隱患。因此,基于元胞自動機(jī)模型,深入了解行人和車輛的相互影響機(jī)理以及交通運(yùn)行的特點(diǎn),提出比較適合實(shí)際交通情況的建模方法,從而為有效地解決交通問題提供理論支持。
關(guān)鍵詞:元胞自動機(jī) 交通路口 行人和車輛疏散
中圖分類號:TP393 文獻(xiàn)標(biāo)識碼:A 文章編號:1007-9416(2016)09-0054-02
1 引言
車輛組成的交通流是一個(gè)離散的系統(tǒng),形成了復(fù)雜的交通運(yùn)行狀態(tài)。元胞自動機(jī)模型是交通流模型的基礎(chǔ),它定義在一個(gè)具有離散、有限狀態(tài)的元胞組成的元胞空間上,并按照一定的局部規(guī)則,在離散的時(shí)間維度上隨之演化,能夠從微觀角度分析復(fù)雜的交通模型。在元胞自動機(jī)中,某一時(shí)刻一個(gè)元胞的狀態(tài)只與前一時(shí)刻此元胞以及相鄰元胞的狀態(tài)有關(guān),能夠?qū)r(shí)間和空間離散化,分割成一個(gè)小小的單元,其特性與行人運(yùn)動的特性較好地匹配。進(jìn)而分析行人和車輛在路口的交通流演化準(zhǔn)則,進(jìn)行合理地分散,從而減少擁堵的發(fā)生。
2 城市道路擁堵
2.1 城市道路特點(diǎn)
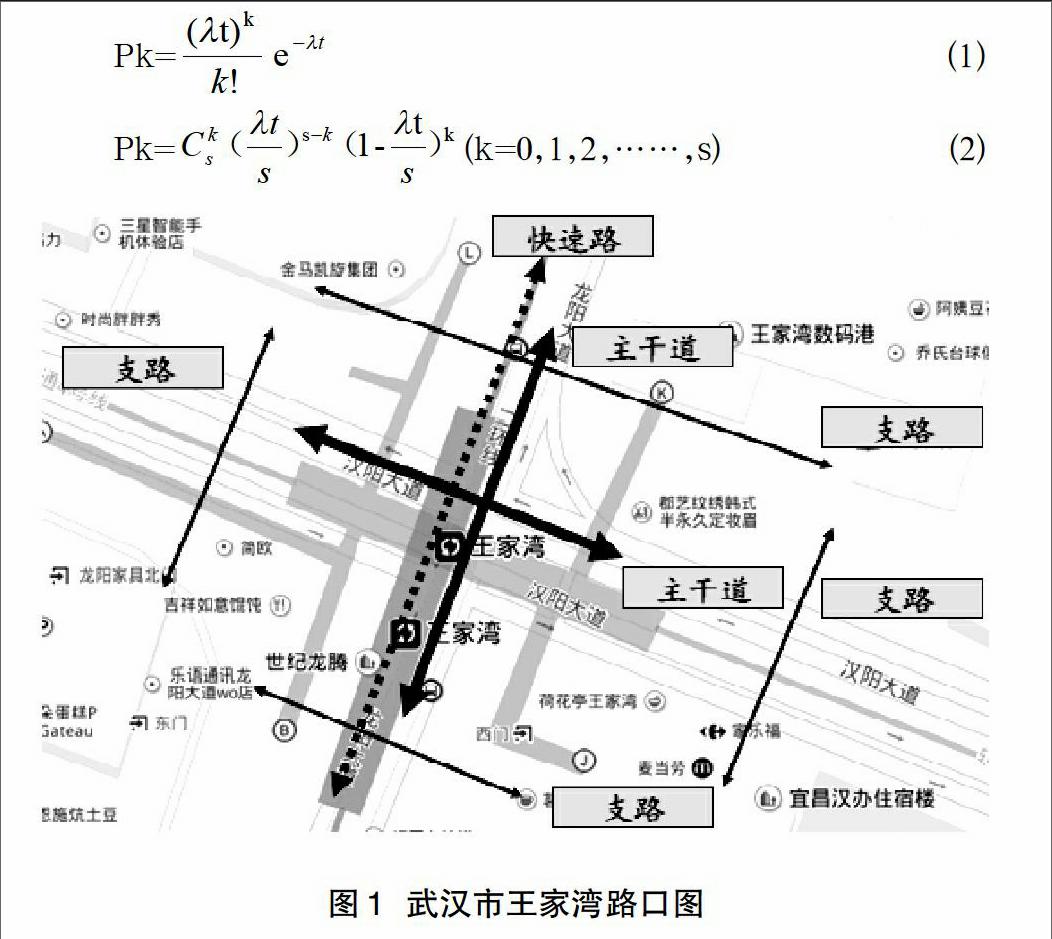
城市交通多交叉路口,普遍由紅綠燈控制,道路數(shù)量大,種類多。每條道路互連互通,交錯(cuò)縱橫,形成網(wǎng)絡(luò),不同車輛的行駛情況導(dǎo)致了擁堵的必然發(fā)生。根據(jù)交通流量的不同,城市道路依次分為快速路、主干路、支路等層次。車流量較小時(shí),車輛自由行駛,其間沒有相互聯(lián)系,當(dāng)車流量超過臨界值時(shí),擁堵就會產(chǎn)生。
以武漢市王家灣路口為例(圖1)。
2.2 交通擁堵
交通擁堵在實(shí)際道路上十分常見,一般來說,交通擁堵使車輛產(chǎn)生較長的排隊(duì)現(xiàn)象,幾乎無法前行。在擁堵和非擁堵的重合部分,交通流的狀態(tài)非常不平穩(wěn),可能形成的自發(fā)擁堵也會影響交通的上游和下游,并由此向整個(gè)路網(wǎng)擴(kuò)散。為了防止這類現(xiàn)象的發(fā)生,任何時(shí)候都需要加強(qiáng)對路口交通情況的處理。
3 基于元胞自動機(jī)的行人模型
根據(jù)元胞自動機(jī)的更新情況可分為:格子氣體模型、領(lǐng)域模型[1]、Blue-Adler元胞自動機(jī)模型、動態(tài)參數(shù)模型等應(yīng)用于行人流的仿真研究。
3.1 模型及演化規(guī)則
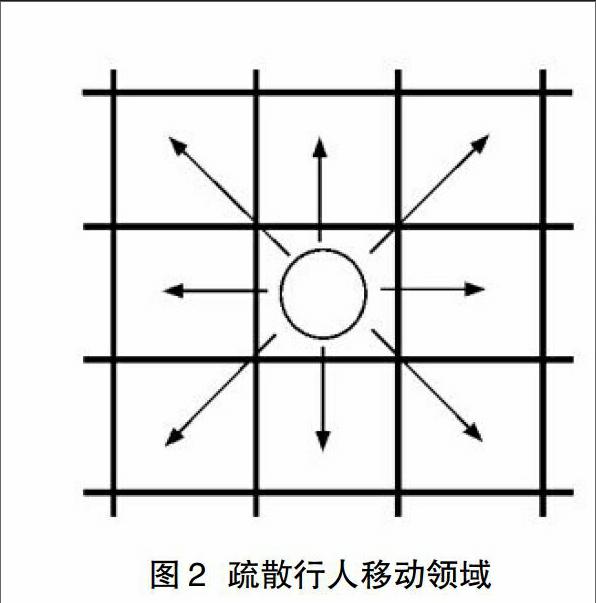
在二維離散元胞網(wǎng)格系統(tǒng)中,把行人的移動區(qū)域劃分為大小相等的正方形網(wǎng)格,大小取0.4×0.4m,每個(gè)網(wǎng)格相當(dāng)于一個(gè)元胞,空格分兩種:被一個(gè)行人占據(jù)或?yàn)榭铡2捎肕oore鄰居的模型,如圖2所示,行人可以向8個(gè)方向運(yùn)動或者選擇原地等待,在每個(gè)離散的時(shí)間步長內(nèi),行人只能移動一個(gè)元胞的長度。模型演化過程中,多個(gè)行人會同時(shí)選擇一個(gè)空格,該沖突使得模型以等概率隨機(jī)確定一個(gè)行人的移動情況,沒有被選擇的保持靜止。
3.2 行人運(yùn)動特性
與車輛相比,行人運(yùn)動更加復(fù)雜和不確定。根據(jù)環(huán)境的變化,他們會相應(yīng)地選擇恰當(dāng)?shù)姆较蚝退俣龋囕v受車道限制,相對來說運(yùn)動特性比較簡單[2]。行人只能近距離和低速行走,步行速度小,步行路線和位置的選擇范圍廣,能夠迅速補(bǔ)上一個(gè)空位元胞。正常情況下,行人步行的速度差別不大,最高速度與最低速度的差別可以忽略不計(jì),并且行人從靜止到運(yùn)動的反應(yīng)時(shí)間短,所以行人的運(yùn)動特性可以認(rèn)為只有靜止或者以相同的速度前行。
3.3 行人元胞自動機(jī)模型
如圖1所示的網(wǎng)格,路口處有較多行人,剩余綠燈時(shí)間不同,他們到達(dá)下一位置的時(shí)間不同,一般來講,人行橫道處剩余的綠燈時(shí)間越長,行人通過的速度就會越慢。通常來說,綠燈時(shí)間為10s以上時(shí),行人平均速度為1.42m/s,10s內(nèi)時(shí)間時(shí),行人平均速度為1.84m/s[3],在網(wǎng)格上隨機(jī)移動。當(dāng)?shù)缆返男腥肆髁俊?000人/小時(shí),在行人間的相互干擾較小且外界因素作用不顯著的情況下,服從泊松分布,如式1所示;而>1000人/小時(shí),泊松分布不足以描述波動的人群,一般用負(fù)二項(xiàng)分布[4]來描述,如式2所示。
(1)行人盡量向前行;
(2)發(fā)生面對面的阻礙時(shí),第一選擇是向右移,右方有行人時(shí),延時(shí)之后移到行人的位置內(nèi);
(3)兩個(gè)行人之間的位置對他們而言,各有一半的概率互相占據(jù)。
在過街行人流較大的情況下,該模型有一種隊(duì)列自動形成機(jī)制,體現(xiàn)行人的自動集中效應(yīng),提高道路的通行能力。
4 車輛模型
4.1 車輛位置
可以把任何車輛進(jìn)入道路的事件看做一個(gè)隨機(jī)的獨(dú)立性事件。各車輛間的時(shí)間間隔可以視為一個(gè)隨機(jī)量,在不同的時(shí)間區(qū)間內(nèi),車輛的流動是相互獨(dú)立的。在一個(gè)很短的時(shí)間Δt內(nèi),區(qū)間[t,t+Δt]內(nèi)車輛產(chǎn)生的概率與t無關(guān),與Δt線性正相關(guān)。
4.2 車輛速度
根據(jù)車輛運(yùn)行的特點(diǎn),其速度一般服從對數(shù)正態(tài)分布或正態(tài)分布,可選擇正態(tài)分布構(gòu)建模型。
正態(tài)分布N(μ,σ2)的分布函數(shù)為:
F(X)=p(X≤x)=-∞ 當(dāng)X服從N(0,1)時(shí),Y=σX+μ服從N(μ,σ2),得到標(biāo)準(zhǔn)的N(0,1)正態(tài)分布的隨機(jī)變量。使用Box-Muller的函數(shù)變換法則[5],產(chǎn)生兩個(gè)均勻分布的隨機(jī)數(shù)m1和m2,從而得出兩個(gè)服從標(biāo)準(zhǔn)正態(tài)分布的隨機(jī)變量n1和n2,表達(dá)式如下: n1=sin(2πm1) n2=cos(2πm2) 5 行人與車輛相互干擾模型 車輛與行人相互干擾的地點(diǎn)發(fā)生在人行橫道,車輛通過人行橫道時(shí)要根據(jù)行人的通過情況做出相應(yīng)的反應(yīng)。當(dāng)人行橫道無行人通過,車輛將其看做為空;當(dāng)人行橫道有行人通過,則車輛在靠近行人之前停止,直到行人完全穿過人行橫道,則車輛視人行橫道為被填充。
5.1 以車輛為主的紅綠燈設(shè)置
綠燈時(shí)間步:人行橫道入口處沒有行人形走。如果人行橫道處有人,則車輛在前面停止,若無行人,正常通過。
紅燈時(shí)間步:未進(jìn)入人行橫道的車輛停止,剛進(jìn)入人行橫道的車輛盡快行駛,其余車輛的狀態(tài)用VDR模型[6]表示。該模型中車輛減速的概率不是確定的函數(shù),而是與車輛速度相關(guān)的函數(shù):
f=f(v)=f0 if v=0;
f=f(v)=f if v>0 f0>f
由此看出,隨機(jī)慢化規(guī)則是上一時(shí)刻時(shí)間步的速度確定下一時(shí)刻時(shí)間步的速度。
5.2 無紅綠燈設(shè)置
與有紅綠燈設(shè)置最大不同的是,人行橫道入口處始終會有一定的概率出現(xiàn)行人,行人會根據(jù)車道第一輛車的位置和速度來判斷是否能通過。根據(jù)t時(shí)刻車輛的位置情況和速度對車道第一輛車在(t+1)時(shí)刻的速度v(t+1)及位置做出預(yù)估,判斷可能位置與人行橫道的距離為d,在根據(jù)d與最大速度vmax的關(guān)系做出選擇。若0
車輛避讓模型
《中華人民共和國道路交通安全法》第四十七條規(guī)定[7]:機(jī)動車經(jīng)過人行橫道時(shí),應(yīng)當(dāng)減速行駛;遇見行人正在通過人行橫道時(shí),應(yīng)當(dāng)減速行駛;遇見行人正在通過人行橫道時(shí),應(yīng)當(dāng)停車讓行。
(1)加速過程:vr→min(vr+1,vmax-1),它對應(yīng)的是車輛最大速度行駛的特性,車輛行駛達(dá)到最大速度不超過vmax-1。
(2)減速或停車:vr→min(vr,dr),車輛為了避免碰撞而選擇減速或停車。
(3)隨機(jī)慢化:以概率ps(0≤ps≤1),慢化有vr→max(vr-1,0),表示各種不確定因素導(dǎo)致的減速選項(xiàng)。
(4)位置變化;xr→xr+vr,表示車輛以變化后的速度行進(jìn)。
xr、vr分別r車的位置和速度,dr=xr+1-xr=l表示r車和前車r+1之間空的元胞數(shù)量,l表示車輛的長度。
6 結(jié)語
(1)利用元胞自動機(jī)構(gòu)建的模型,對經(jīng)典交通路段(王家灣)的交通形式進(jìn)行了分析。
(2)通過對行人和車輛的研究,得出相應(yīng)的維持有序交通秩序的策略。
(3)城市交通受多種因素影響,交通擁堵的形成機(jī)理非常多變,本文基于一定的理想狀況下進(jìn)行的探討,仍有許多不合理的問題沒有考慮,如天氣、街邊路人等因素。
(4)已構(gòu)建的交通模型適用范圍比較不大,與實(shí)際情況的適應(yīng)程度有待提高。
(5)以行人與車輛相互干擾模型為基礎(chǔ),可以考慮將行人違規(guī)對道路交通流產(chǎn)生的影響,根據(jù)行人的通行情況以及車輛追尾等因素的判斷,從而更加全面地描述行人在復(fù)雜的路況下的特點(diǎn)。
參考文獻(xiàn):
[1]岳昊.基于元胞自動機(jī)的行人流仿真模型研究[D].北京:北京交通大學(xué),2008:14-15.
[2]Burstedde C,Klauck K,Schadschneider A,et al.Simulation of pedestrian dynamics using a two-dimentional cellular automata moel[J].Chinese Science Bulletin,2001,29(5):507-525.
[3]馮樹民,吳閱辛.信號控制交叉口行人過街速度分析[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2004,36(1):76-76
[4]王煒,過秀成等.交通工程學(xué)[M].南京:東南大學(xué)出版社,2003.
[5]孫亮.matlab語言與控制系統(tǒng)仿真[M].北京:北京工業(yè)大學(xué)出版社,2006.
[6]張笑梅.基于元胞自動機(jī)和模糊推理的交通流模型研究[D].大連理工大學(xué),2013.
[7]《中華人民共和國道路交通安全法》.2003年,第四章第四十七條.
 數(shù)字技術(shù)與應(yīng)用2016年9期
數(shù)字技術(shù)與應(yīng)用2016年9期
- 數(shù)字技術(shù)與應(yīng)用的其它文章
- 基于JAVA技術(shù)B/S架構(gòu)用藥管理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 醫(yī)院結(jié)構(gòu)化面試考務(wù)管理系統(tǒng)的研發(fā)
- 高精度智能電能計(jì)量系統(tǒng)的設(shè)計(jì)
- 基于物聯(lián)網(wǎng)的精準(zhǔn)農(nóng)業(yè)環(huán)境監(jiān)測系統(tǒng)設(shè)計(jì)
- 平臺化思路下SIPTU的設(shè)計(jì)與實(shí)現(xiàn)
- 山東省交通運(yùn)輸投資計(jì)劃管理信息系統(tǒng)的設(shè)計(jì)