加速度傳感器在汽車電子上的應用
2016-11-09 22:42:11謝軍
數字技術與應用 2016年9期
關鍵詞:汽車電子
謝軍
摘要:本課題以汽車電子為背景,結合飛思卡爾C型車模雙后輪驅動的特點,以STM32C8T6最小系統版為平臺搭建硬件系統,通過加速度傳感器檢測到的傾斜角度,及時調整小車行駛速度,使小車能自動完成上下坡時的加速、減速。現在的汽車相較于以前的汽車來說,在性能上更加的智能化,而且人們在使用汽車的過程中會感到更加的輕便。因此,現在在制造汽車的過程中所面臨的挑戰就是增加傳感器的需求量。本文是以汽車電子為背景,利用加速度傳感器能夠測量汽車在行駛過程中的傾斜角度以及加速度等信息,來實時反饋汽車的動態信息,并調整行駛速度,滿足人們的舒適性要求,保證駕車人的安全。
關鍵詞:汽車電子 加速度傳感器 傾斜角度
中圖分類號:TP212 文獻標識碼:A 文章編號:1007-9416(2016)09-0060-02
1 系統總體設計
1.1 系統組成
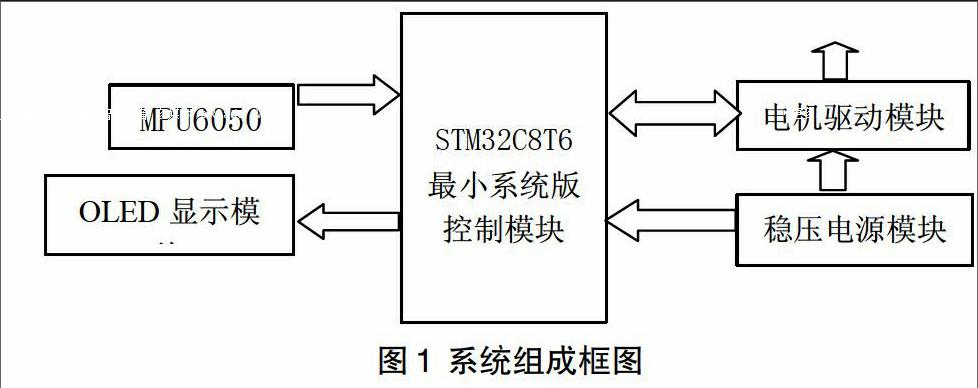
系統組成框圖如圖1所示。
1.2 系統工作原理
本小車使用STM32C8T6最小系統版作為主控單元,當小車在平地(傾角范圍-5~+5)行駛時,PMW的值為1000,這時小車會以相對較慢的速度勻速行駛。上坡時,隨著傾角范圍不斷增大(+6~+80),PWM的值也會逐漸增加,電機的轉速隨之變快,當傾角達到最大值時(+80),PWM的值也達到峰值6000(可更改),為了保護車身不受損壞,傾角大于+80,電機停止運轉。下坡時,隨著傾角范圍不斷增大(-6~-80),PWM的值會逐漸減小,電機的轉速隨之變慢,當下坡傾角達到最大值時(-80),PWM的值也達到最小值800(可更改),為了保護車身不受損壞,傾角大于-80,電機停止運轉。
在這個過程中,可通過OLED液晶屏隨時查看小車的運動狀態,包括車身周圍的溫度,傾斜角度,PWM值和加速度等信息。
2 硬件設計
2.1 主控電路設計
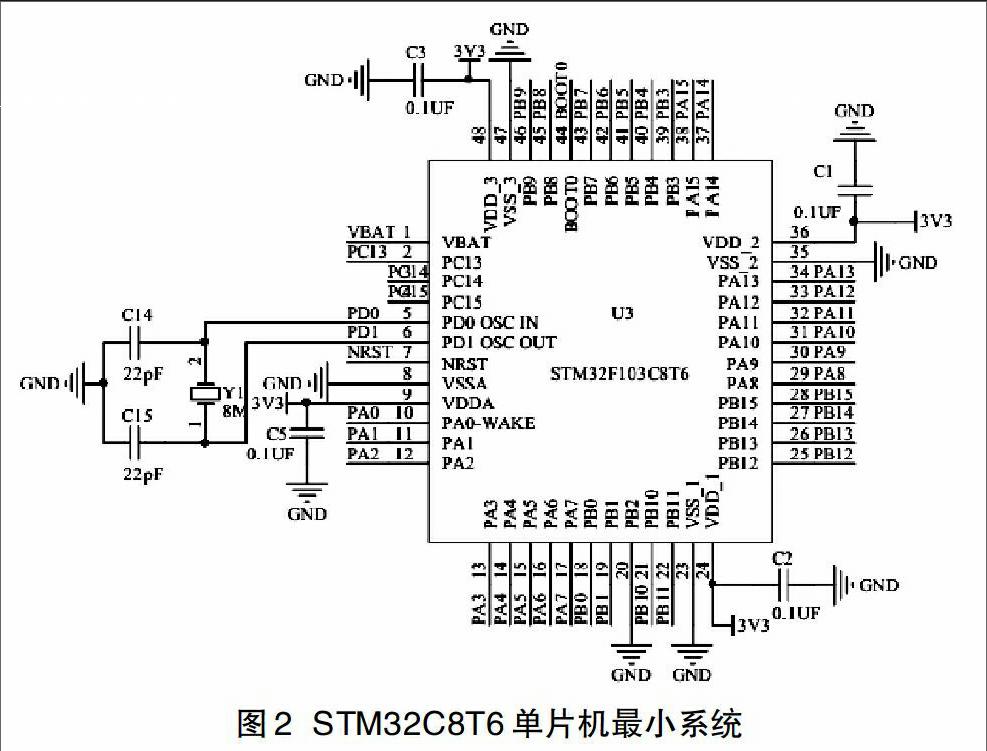
STM32C8T6最小系統版內有最新一代的嵌入式ARM處理器。因此,這種芯片構成的最小系統功能部件種類全,功能強。用STM32C8T6最小系統版時,只要將相關模塊接上時鐘電路和復位電路即可。如圖2所示STM32C8T6單片機最小系統。其應用特點:(1)有可供用戶使用的大量I/O口線。(2)內部存儲器容量有限。(3)應用系統開發具有特殊性。
2.2 電機驅動電路的設計
像直流電機這樣大功率的外部器件,能耗大,對單片機的驅動能力有很高的要求,而往往單片機提供不了那么大的驅動能力,所以需要接驅動電路。電機驅動芯片的種類也有很多,在此次設計中,使用TB6612FNG作為電機驅動芯片。因為它的驅動能力強,能耗低,不易發熱,抗干擾能力強,能夠提供穩定的性能。TB6612FNG電機驅動芯片可以同時驅動兩個直流電機,而且它反應快速,可以通過VCC引腳接電源后給芯片和電機供電。
2.3 傾角傳感器電路
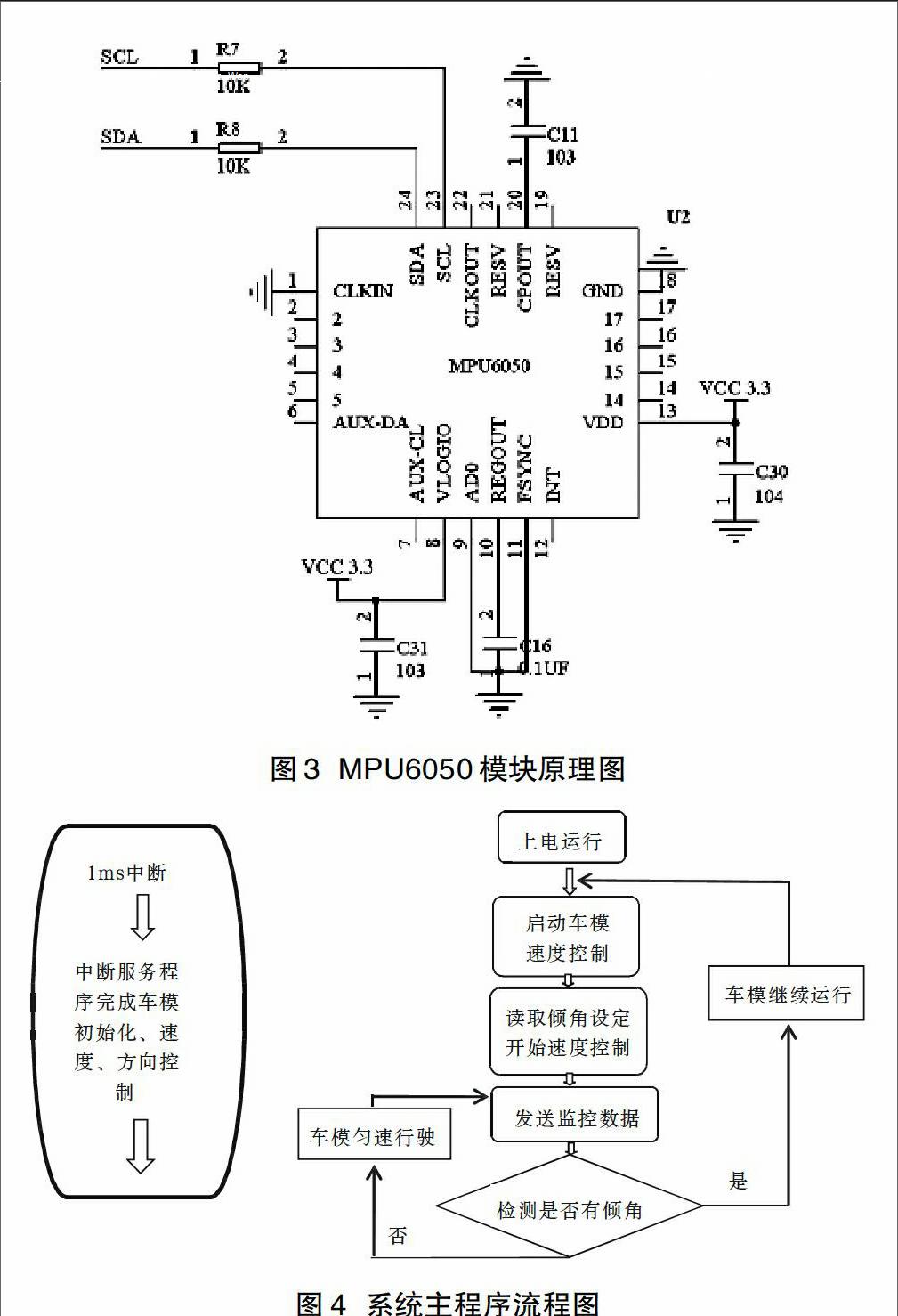
三軸加速度傳感器主要是對它所采集到的信號進行放大濾波,同時還可以檢測環境溫度等。MPU6050模塊原理圖如圖3所示。
陀螺儀的輸出信號放大了10倍左右,并將零點偏置電壓調整到工作電源的一半(1.65V)左右。MPU6050它是一款6軸運動處理組件。它集成了陀螺儀和加速度計于一體的芯片,它極大程度上免除了獨立使用的陀螺儀和加速度計在時間上的誤差,而且減少了占用 PCB板的空間。
3 軟件設計簡介
本設計采用的是模塊化的思路來進行設計和編寫程序,程序主要由主程序模塊、驅動模塊、顯示模塊等四大部分組成,每一部分都針對相應的硬件電路。
3.1 主程序模塊
(1)程序控制設計。小車的程序控制系統是由主程序模塊、電機驅動模塊、MPU6050三軸加速度傳感器驅動模塊、OLED顯示模塊四大模塊組成,編寫程序,讓各個模塊組成的系統能夠順利運行,驗證電路板的正確性。各個程序的功能不一樣,其中PWM波產生子程序是利用單片機的定時器產生的占空比,進而控制電機的轉速。電機控制子程序則是通過定義TB6612FNG的IN端口信號分別控制電機的起、停、前進。加、減速程序則是單片機檢測P17端口信號當信號由高電平變為低電平時開始控制左右電機的轉速,使小車轉彎自動加速和減速。本次小車程序是利用C語言進行編程通過不同子模塊的調用來實現小車自動加速和減速。
(2)系統主程序流程圖如圖4所示。
首先小車進行上電,對單片機各個應用模塊進行初始化,還有對程序中的變量進行初始化。接下來單片機控制小車開始前進,前進過程中單片機通加速度傳感器模塊不斷檢測小車與地面的傾角,并將檢測到的相關數據傳送給單片機。當檢測到小車與地面存在的傾角在程序規定范圍內,單片機控制電機驅動模塊驅動電機完成小車的加速、減速,OLED顯示實時數據,完成本設計的要求。
3.2 主要控制函數說明
3.2.1 角度計算函數
本程序讀取MPU6050模塊的AD采用數值,然后計算車模的傾角。對于讀取的陀螺儀和加速度計的數值需要減去零偏值。在車模保持水平時,讀出兩個通道的數值,便是相應的零偏值。
4 結語
此次設計是以STM32C8T6最小系統版為核心,以飛思卡爾C型車模為基礎,自己設計制作車架,在結合MPU6050三軸加速度傳感器、電機驅動模塊、OLED顯示模塊等相關電路,通過最后的安裝、調試等工作,完成智能小車硬件安裝、軟件調試,實現了智能小車能夠自動完成加速、減速等功能。
參考文獻
[1]胡壽松.自動控制原理(第五版)[M].北京:科學出版社,2007.
[2]丹尼斯,克拉克等.機器人設計與控制.北京:科學出版社,2004.
[3]蔡自興.21世紀機器人技術的發展趨勢[J].南京化工大學報,2000,22(4):73-79.
[4]肖南峰.智能機器人[M].廣州:華南理工大學出版社,2008.1:7-8.
[5]陳永真主編.全國大學生電子設計競賽試題精解選[M].北京:電子工業出版社,2007年6月.
[6]高楓.基于ARM 的智能尋跡小車的設計與實現[D].山西:中北大學,2012.6.
[7]黃智偉主編.全國大學生電子設計競賽訓練教程[M].北京:電子工業出版社,2006年6月.
[8]劉崇翔.基于ARM的智能小車的設計與研究,江南大學碩士學位論文,2012.03.
[9]楊西明.單片機編程與應用入門.機械工業出版社,2005.
[10]丁鎮生.傳感器及傳感技術應用.北京:電子工業出版社,1998:59-72.
猜你喜歡
科技視界(2017年23期)2017-12-09 22:02:48
中國科技博覽(2017年20期)2017-07-19 18:28:54
中國科技博覽(2017年19期)2017-07-19 10:06:40
山東工業技術(2017年8期)2017-05-08 00:32:55
現代商貿工業(2017年4期)2017-04-24 09:42:10
數字技術與應用(2016年12期)2017-04-15 21:47:29
科教導刊(2017年1期)2017-03-13 19:48:48
電子技術與軟件工程(2016年24期)2017-02-23 13:00:50
科技創新與應用(2017年3期)2017-02-18 17:05:27
廣西教育·C版(2016年11期)2017-01-16 14:23:10
