
基于移動手機(jī)Web的植物分布查詢系統(tǒng)設(shè)計與實(shí)現(xiàn)
2016-11-09 23:41:45許淼平賴日文郭雅潔魏林清閻旭楊
數(shù)字技術(shù)與應(yīng)用 2016年9期
許淼平 賴日文 郭雅潔 魏林清 閻旭 楊惠明

摘要:北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)是我國自主研發(fā)的衛(wèi)星定位系統(tǒng),利用北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)定位功能和百度地圖AIP位置顯示功能,導(dǎo)入校園植物信息數(shù)據(jù)庫,建立基于移動手機(jī)Web的校園植物分布查詢系統(tǒng)。植物分布查詢和移動定位周邊植物信息查詢是該系統(tǒng)的兩大部分,可以定位植物也可以獲取植物特性信息。目的是為了解決校園及景區(qū)游客方便了解該地區(qū)植物分布及植物相關(guān)信息普及。
關(guān)鍵詞:BDS 移動手機(jī)Web 百度地圖 植物查詢 定位信息
中圖分類號:S476 文獻(xiàn)標(biāo)識碼:A 文章編號:1007-9416(2016)09-0155-03
北斗衛(wèi)星導(dǎo)航系統(tǒng)是我國自行研制開發(fā)、可以獨(dú)立運(yùn)行,區(qū)域性有源三維衛(wèi)星定位與通信系統(tǒng)。該系統(tǒng)能夠全天候、全天時地在全球領(lǐng)域內(nèi)為各類用戶供給高精度的定位、導(dǎo)航和實(shí)時授時服務(wù),而且具備短報文通信能力[1]。
1 項目背景
目前有一些關(guān)于植物定位方面的研究,如利用Web服務(wù)器采用B/S架構(gòu),由C語言NET、ASP、ADO、NET技術(shù)開發(fā),同時,引入百度地圖JavaSeript API,用戶只需通過瀏覽器不僅能夠監(jiān)控數(shù)據(jù)信息,而且定位信息能夠直觀地被顯示在地圖上[2];北京植物園建立了一系列包括植物引種登記、植物物種等的植物信息數(shù)據(jù)庫,還有圖、文、表一體化的植物定制電子地圖,植物信息的數(shù)字化管理能夠被實(shí)現(xiàn),但僅僅是簡單的地圖顯示圖[3];還有探究通過GPS移動定位、百度地圖定位API接口,在對校園內(nèi)植物分布坐標(biāo)數(shù)據(jù)采集與分析,個人定位可以被實(shí)現(xiàn),可以查詢周邊植物信息等等[4]。
福建農(nóng)林大學(xué)風(fēng)景秀麗,吸引了很多游客進(jìn)校參觀。但游人卻不能全然知道其植物名稱與特點(diǎn)。本系統(tǒng)是基于移動手機(jī)客戶端,利用BDS定位導(dǎo)航功能以及百度地圖顯示信息功能,導(dǎo)入植物數(shù)據(jù)庫大數(shù)據(jù)進(jìn)行校園植物信息查詢和路徑導(dǎo)航。可以通過移動手機(jī) Web 平臺,利用百度地圖定位功能和大數(shù)據(jù)庫數(shù)據(jù)系統(tǒng),讓游人打開手機(jī)植物搜索App就好。
2 查詢系統(tǒng)設(shè)計
植物查詢系統(tǒng)大致分為兩個部分,分別是:植物分布的查詢、移動定位周邊植物信息的查詢。
通過BDS移動定位周邊的植物信息,得到個人周圍BDS地理位置。并通過與植物分布坐標(biāo)數(shù)據(jù)庫對照剖析使用百度地圖API使得相關(guān)植物信息清晰地顯示在地圖中。這部分設(shè)計的初衷是為了便于游客發(fā)現(xiàn)周邊相同美景,便于宣傳某學(xué)校的美麗。
2.1 分布查詢系統(tǒng)基礎(chǔ)設(shè)計
這個掌上應(yīng)用,包含了植物信息表和植物坐標(biāo)表。兩個表格具有對應(yīng)關(guān)系,表示植物定位信息的不同兩個領(lǐng)域的聯(lián)系。其一表包含:植物的編號、簡介和植物名稱;另一表格包含植物的編號和經(jīng)度、緯度。其中經(jīng)緯度的形式表明定位的實(shí)質(zhì)只是平面位置。
2.2 獲取植物定位信息
為定位校園內(nèi)的植物坐標(biāo),需要借用百度地圖的坐標(biāo)拾取器進(jìn)行坐標(biāo)定位并獲取其坐標(biāo)。例如在校園內(nèi)規(guī)定其中若干點(diǎn)的標(biāo)識,如百度地圖上常見的位置定位一樣顯示定位信息坐標(biāo)位置。
2.3 兩點(diǎn)定位植物坐標(biāo)
小型植物的地理坐標(biāo)可以通過測算和其相同片區(qū)內(nèi)的大型植物的距離差和偏移角度來測得。利用兩點(diǎn)緯度計算距離的方法進(jìn)行推導(dǎo)換算,這樣獲得的所有坐標(biāo)數(shù)據(jù)才是精確覆蓋范圍廣的數(shù)據(jù)庫。
2.4 移動端BDS 定位
本文所設(shè)計的移動目標(biāo)定位追蹤系統(tǒng)通過BDS導(dǎo)航模塊接收移動目標(biāo)位置信息,并通過GSM網(wǎng)絡(luò)與客戶端信息傳送。用來實(shí)現(xiàn)對移動目標(biāo)的定位追蹤。該系統(tǒng)終端體積小、攜帶方便,雙模定位更加精確。室外定位技術(shù)主要是借助BDS。用戶終端由BDS接收機(jī)接收衛(wèi)星信號,具有系統(tǒng)覆蓋廣和定位精度高等好的方面[6]。
3 BDS 移動定位誤差來源分析
北斗二代定位系統(tǒng)采用的是無源定位的方式,導(dǎo)航電文會被衛(wèi)星系統(tǒng)不斷發(fā)射出來[7]。從北斗定位的過程來看,由于測量帶來的偏差視作偽距測量時的距離誤差,被稱做用戶等效測距誤差[8]。
3.1 BDS移動單點(diǎn)定位法
不斷地發(fā)射導(dǎo)航電文是BDS衛(wèi)星部分作用[9]。因為用戶接收機(jī)使用的時鐘與衛(wèi)星星載時鐘不可能總是同步,所以除了用戶的三維坐標(biāo) x、y、z 外,衛(wèi)星與接收機(jī)之間的時間差被作為未知數(shù),然后用4個方程將這4個未知數(shù)解出來。所以如果想知道接收機(jī)所處的位置,至少要能接收到4個衛(wèi)星的信號。形成以下方程式建立方程求解[10]:
3.2 基于BDS的偽衛(wèi)星技術(shù)
旨在解決BDS定位誤差問題。地面?zhèn)涡l(wèi)星和北斗衛(wèi)星發(fā)射相同格式的導(dǎo)航信號,用戶機(jī)同時接收雙星與地面?zhèn)涡l(wèi)星的信號進(jìn)行位置的解算,從而定位。通過偽衛(wèi)星建立方程,將高程方程替換,可以獲得含有四個、四個以上未知數(shù)方程組[11]:
3.3 實(shí)地測量定位誤差
在獲得校園內(nèi)絕大部分植物的龐大坐標(biāo)定位信息數(shù)據(jù)庫后,需要測算實(shí)際坐標(biāo)與在數(shù)據(jù)庫內(nèi)顯示的坐標(biāo)定位信息的誤差。選擇30個數(shù)據(jù)庫內(nèi)隨機(jī)定位坐標(biāo),再實(shí)地測量各點(diǎn)坐標(biāo),對比兩項坐標(biāo)的誤差大小。
3.3.1 隨機(jī)選取定位數(shù)據(jù)
在系統(tǒng)建立的數(shù)據(jù)庫中隨機(jī)機(jī)選30組定位信息。讀取此中坐標(biāo),得如下表1,并在地圖上標(biāo)注其分布得如圖1。
3.3.2 實(shí)地定位測量誤差分析
相關(guān)App網(wǎng)頁設(shè)計在myeclipse 軟件工具編程,并存儲在百度地圖API,生成壓縮包最后擺上百度云服務(wù)器,實(shí)地測量其百度坐標(biāo)經(jīng)緯度可以利用移動手機(jī)相關(guān)的應(yīng)用網(wǎng)站操作,最終得到30個點(diǎn)的百度坐標(biāo),如表1。
通過得出的兩組對應(yīng)的百度定位值計算,使用百度地圖API 接口的下式進(jìn)行兩點(diǎn)經(jīng)緯度的距離計算[12]:
Varpoint A=new BMap.Point(x,y);
Varpoint B=new BMap.Point(x‘,y);
BMap.get Distance(pointA,pointB).to Fixed。
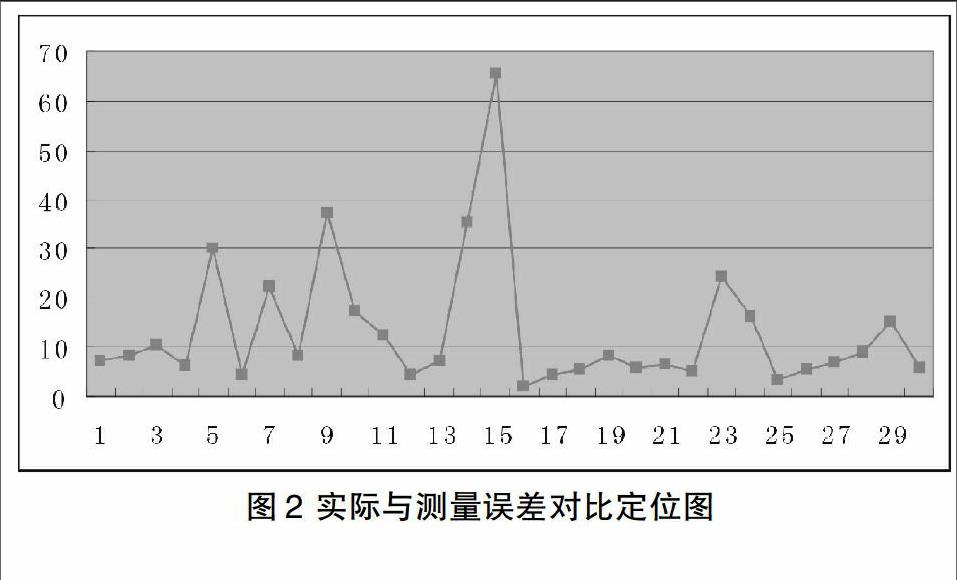
這里y和y是緯度,x、x是經(jīng)度;點(diǎn)A和點(diǎn)B是被作為兩個不同坐標(biāo)位置點(diǎn)。兩點(diǎn)不同坐標(biāo)的距離差通過運(yùn)用BMap.get Distance 函數(shù)得到,to Fixed表示保存兩位小數(shù),用來計算這30組數(shù)據(jù)庫和BDS系統(tǒng)定位的偏差。正如下面的數(shù)據(jù)表2。根據(jù)表格模擬對比制作出實(shí)際與測量對比定位圖,如圖2。
這個數(shù)據(jù)表的數(shù)據(jù)就是利用通過BMap.get Distance(pointA,pointB)方法獲得兩差異經(jīng)緯度的實(shí)際距離差值。
通過對圖2觀察后得到剖析結(jié)果。可以比較清晰地看到:在校園內(nèi)的BDS定位誤差,大約95%以上在0~30米的范圍之內(nèi)。
4 解決BDS定位誤差對策
4.1 定位誤差帶來的影響
在某校園內(nèi)BDS定位誤差分析的結(jié)果中我們能夠清楚,我們制作的系統(tǒng)是搜索植物目標(biāo)信息,而且我們定位位置周圍20米內(nèi)的全部植物的信息能夠被獲得,如果是單獨(dú)運(yùn)用BDS定位一個植物的定位信息,可能造成較大的誤差,所以解決此問題非常關(guān)鍵。
4.2 解決方法分析
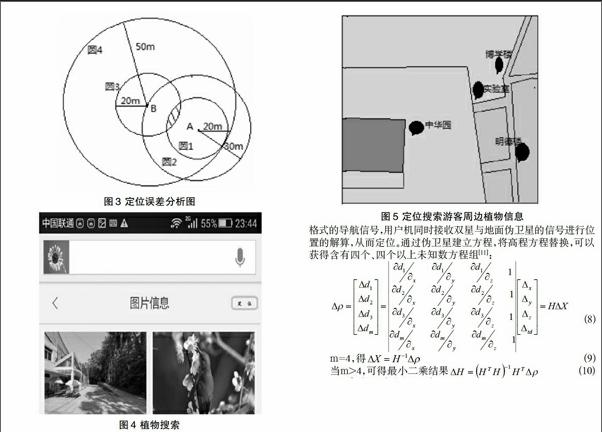
可從圖3得到,周邊20米范圍的植物坐標(biāo)信息在被定位搜索。偏差是30m,我們假想A作為定位點(diǎn),圓1是定位點(diǎn)周邊20m圓,其內(nèi)全部植物信息都是我們想要獲悉的植物信息。圓2為偏差是30m的圓,圓2內(nèi)的植物信息絕對是游人想要的[13]。
在比較特殊的條件下,我們保持搜索半徑是20m,這樣我們系統(tǒng)搜索的結(jié)果為30m范圍內(nèi),圖中的陰影部分就是我們希望了解的植物的一點(diǎn)而已。于此,如果系統(tǒng)把查詢的半徑變作50m,那植物定位系統(tǒng)在這樣的情況下,這里面就包括了圓1。這樣在真實(shí)的情況下,我們將目標(biāo)查詢范圍從20m增大為50m,這樣可以保證在存在BDS定位偏差的條件下,也同樣能得到我們希望的信息。還有就是對于在我們查詢中得出的多余部分的信息,讓游覽的游人由自身需要判定需要與否就好了。這樣,在保證我們校的目標(biāo)條件下,通過簡單的增大查詢范圍就可以解決BDS定位偏差對我們帶來的情況。
5 軟件功能實(shí)現(xiàn)
憑借機(jī)群的特點(diǎn)和通信技術(shù)的發(fā)展?fàn)顩r,本文提出了基于和基站定位的通訊定位系統(tǒng)。監(jiān)控中心服務(wù)器、嵌入式定位終端以及網(wǎng)站發(fā)布3個模塊構(gòu)成系統(tǒng)。系統(tǒng)工作流程是嵌入式定位終端控制SIM900模塊定時采集基站信息,將經(jīng)緯度數(shù)據(jù)通過BDS傳輸?shù)奖O(jiān)控中心服務(wù)器 TCP端口;監(jiān)控點(diǎn)服務(wù)器接收數(shù)據(jù)并被保存至數(shù)據(jù)庫,百度地圖API接口被Web服務(wù)器利用將百度地圖服務(wù)連接到網(wǎng)頁,用戶即可通過瀏覽器査詢位置信息[14]。
5.1 植物查詢分布
如圖4所示,在點(diǎn)擊搜索欄可以搜索所需要植物的信息,也可以按右邊框的定位欄,可以定位所在位置,查詢周邊植物分布和信息,即為相應(yīng)植物在校園內(nèi)分布情況。
5.2 定位并查詢周邊植物信息
如圖所示,圖5是搜索游人周邊50m范圍內(nèi)植物信息結(jié)果,觀察可看到游人身邊植物的名稱和位置以及相關(guān)進(jìn)一步信息。
6 方案創(chuàng)新設(shè)計
基于移動手機(jī)用戶端的植物查詢系統(tǒng)結(jié)合了BDS的精確定位功能,并且建造了龐大的植物數(shù)據(jù)庫,利用百度地圖AIP顯示功能,結(jié)合當(dāng)下APP手機(jī)軟件方便快捷的功能設(shè)計的一款全新理念的具有植物查詢和路徑定位的功能系統(tǒng)。植物查詢系統(tǒng)大致分為兩個部分,分別是:植物分布查詢、移動定位周邊植物信息查詢。
移動定位周邊植物信息查詢的機(jī)理是基于BDS移動定位,得到個人周邊BDS定位坐標(biāo)信息。并通過與植物圖庫對照剖析使用百度地圖API獲取相關(guān)植物信息并準(zhǔn)確地顯示在地圖上。這部分設(shè)計的初衷是為了便于游客發(fā)現(xiàn)周邊相同美景,便于宣傳農(nóng)大的美麗。
7 系統(tǒng)應(yīng)用展望
本系統(tǒng)已經(jīng)建成大量的植物數(shù)據(jù)庫信息,并且已經(jīng)初步制作出植物分布查詢系統(tǒng)App軟件,此軟件易于安裝并使用方便,搜尋植物功能強(qiáng)大,定位精準(zhǔn),查詢植物信息全面到位,是一款非常適合綠色旅游的游客必備手機(jī)軟件。
此系統(tǒng)目前覆蓋面是在校園,但當(dāng)植物圖庫越發(fā)完善后,加之定位越加精準(zhǔn)后,在將來,不管我們身處何方,都可用這款系統(tǒng)進(jìn)行植物查詢。今后圖庫數(shù)據(jù)更加完善后,此軟件系統(tǒng)可以在森林公園、各名勝風(fēng)景區(qū)和植物園內(nèi)應(yīng)用,隨處可查其內(nèi)植物信息和分布情況。
參考文獻(xiàn)
[1]王振嶺.基于RDSS通信鏈路的雙模定位技術(shù)研究[M].北京:第一屆中國衛(wèi)星導(dǎo)航學(xué)術(shù)年會論文集,2010.
[2]李萬莉,項著廷.基于百度地圖API的工程機(jī)群定位系統(tǒng)開發(fā)[D].同濟(jì)大學(xué),2014.
[3]王康,權(quán)鍵,等.北京植物園植物信息數(shù)字化管理的初步實(shí)現(xiàn)[J].中國園林,2005,11(5):76-78.
[4]宋軍帥等.校園植物分布查詢系統(tǒng)設(shè)計與實(shí)現(xiàn)[J].科技傳播,2015(4):136-139.
[5]韓忠民.知經(jīng)緯度計算兩點(diǎn)精確距離[J].科技傳播,2011(11):196,174.
[6]楊元喜.北斗衛(wèi)星導(dǎo)航系統(tǒng)的進(jìn)展、貢獻(xiàn)與挑戰(zhàn)[J].測繪學(xué)報,2010,39(1):1-6.
[7]Davide BIertozz, Shashi Kumar A P. Networks-on-chip:emerging research topics and novel ideas [Z]. VLSI Design, 2007.
[8]SHI Chuang,ZHAO Qile,HU Zhigang,etal.Precise Relative Positioning Using Real Tracking Data from COMPASS GEO and IGSO Satellites[J].GPS Solutions,2013,17(1):103-119.
[9]STEIGENBERGER P,HUGENTOBLERU,HAUSCHILDA,etal.Orbit and Clock Analys is of COMPASS GEO and IGSO Satellites[J].Journal of Geodesy,2013,87(6):515-525.
[10]楊鵬.基于Android的校園位置服務(wù)系統(tǒng)研究與實(shí)現(xiàn)[D].大連理工大學(xué),2013.
[11]郭陳江,馬瑞峰,等.基于北斗導(dǎo)航系統(tǒng)改進(jìn)技術(shù)的定位誤差偽真與分析研究[J].計測技術(shù).2006,26(1):21-23.
[12]張明,顧曉雪.北斗接收機(jī)定位誤差分析[J].電子與封裝,2015(9):40-43.
[13]張楠.高效的片上網(wǎng)絡(luò)體系結(jié)構(gòu):核內(nèi)路由[D].浙江:浙江大學(xué)碩士學(xué)位論文,2008.
[14]魏秀啟,鄭維廣,等.北斗杯導(dǎo)航定位接收機(jī)的原理及硬件實(shí)現(xiàn)[J].設(shè)計參考,2009(4):37-43.
