一種快速車流量檢測算法
2016-11-10 22:53:48謝印慶姜莉王魯黃超劉婷
哈爾濱理工大學學報 2016年4期
謝印慶 姜莉 王魯 黃超 劉婷

摘要:車流量檢測是城市智能交通的關鍵技術之一,針對目前視頻檢測算法復雜度高、檢測準確率不高的問題,提出了一種快速車流量檢測算法,該算法通過劃定進入和離開檢測線。并結合背景差分方法,將目標的面上檢測,轉化為線上檢測,避免了對目標復雜的跟蹤過程及其帶來的檢測誤差,有效降低了算法的復雜度,提高了檢測的準確率,實驗表明,該算法能夠快速分車道檢測車輛,計算復雜度低,檢測準確率高,且具有車輛速度測量能力,能夠為智能交通系統提供必要的支持。
關鍵詞:智能交通系統;車流量檢測;背景差分;檢測線
DoI:10.15938/j.jhust.2016.04.004
中圖分類號:TP391
文獻標志碼:A
文章編號:1007—2683(2016)04—0019-06
0引言近年來,城市交通壓力日加嚴峻,車輛擁堵現象越發普遍,智能交通系統作為一種前景廣闊的解決方法,能夠為交通擁堵提供早期預警,及時疏散車流,因而得到了人們的廣泛重視,要實現智能交通系統,首先要能夠實時而準確地掌握道路上的車流量、車速、車型等交通參數信息,目前,獲取這些信息,主要有3種方法,第一種是接觸式檢測,將感應裝置埋藏于路面之下的,當車輛通過時,引起感應裝置的響應,從而得到所需要的交通流量信息,這種方法的安裝維護較為困難,隨著車輛的增多,導致這類裝置使用壽命較短,路基下沉、冰凍等也會影響采集系統的使用,且該種系統難以對車輛的速度進行有效監測,第二種方法是波頻檢測,主要有微波、紅外、超聲波三種,利用返回頻率差或者時間差來檢測車輛,這種方法受到天氣的影響較大,且成本較高,第三種方法是視頻檢測方法,這種方法利用計算機視覺技術獲取道路交通的參數,具有安裝維護簡單、成本低廉等優點,目前,車輛視頻檢測技術目前仍處于快速發展階段,
車輛的視頻檢測技術,利用交通路口的視頻探頭,獲取車輛通行的視頻畫面,然后利用視頻或者圖像處理的方式,獲取車輛的動態信息,從而實現對車流量的實時監控,常用的處理方法有:相鄰幀差法、邊緣檢測法、背景差分法,相鄰幀差法通過提取相鄰圖像幀的變化量檢測目標,容易受到樹木、行人、光線等變化信息的影響,導致檢測概率不高;邊緣檢測法在車輛邊緣不明顯的情況下容易造成漏檢;背景差分方法由于較好的可靠性受到了更大的重視,文提出了混合高斯背景模型的方法,在初期采用新的權值和方差更新方法,獲得了較好的性能,文研究了基于高斯混合模型的多車道車流量檢測算法,運用高斯混合模型對檢測帶進行背景建模,實現了多車道車流量檢測,文提出基于差異深度積累的目標檢測算法和基于卡爾曼濾波的目標跟蹤算法,實現了多運動目標的檢測與跟蹤,以上這些背景差分算法在進行車流量檢測時,都是以車輛目標為中心,且其整個背景的維護需要用到整個視頻探頭可以捕捉的畫面,算法設計較為復雜,且背景容易受到樹木抖動的影響,造成檢測概率不足。
本文提出一種快速車流量檢測的實用算法,通過劃定可以調節寬度的檢測線,僅僅在檢測線上采用背景差分方法,對目標進行檢測,由于需要處理的數據由原來的整個面,減少為一條線,即從二維圖像數據轉變為少量的一維數據,使得計算量大大減少;同時,檢測線的選取可以有效避開樹木等抖動背景,使得背景更加穩定,檢測概率更高,在完成原有算法的多車道檢測基礎上,本文算法實現快速實現車流量、車速的檢測,具有更好的檢測概率和更低的計算復雜度,
本文主要介紹了算法的預備工作,給出了算法的主要步驟和關鍵環節,利用實測數據對本文算法和已有算法進行了對比分析,最后對本文進行了小結,
1.車流量檢測的預備
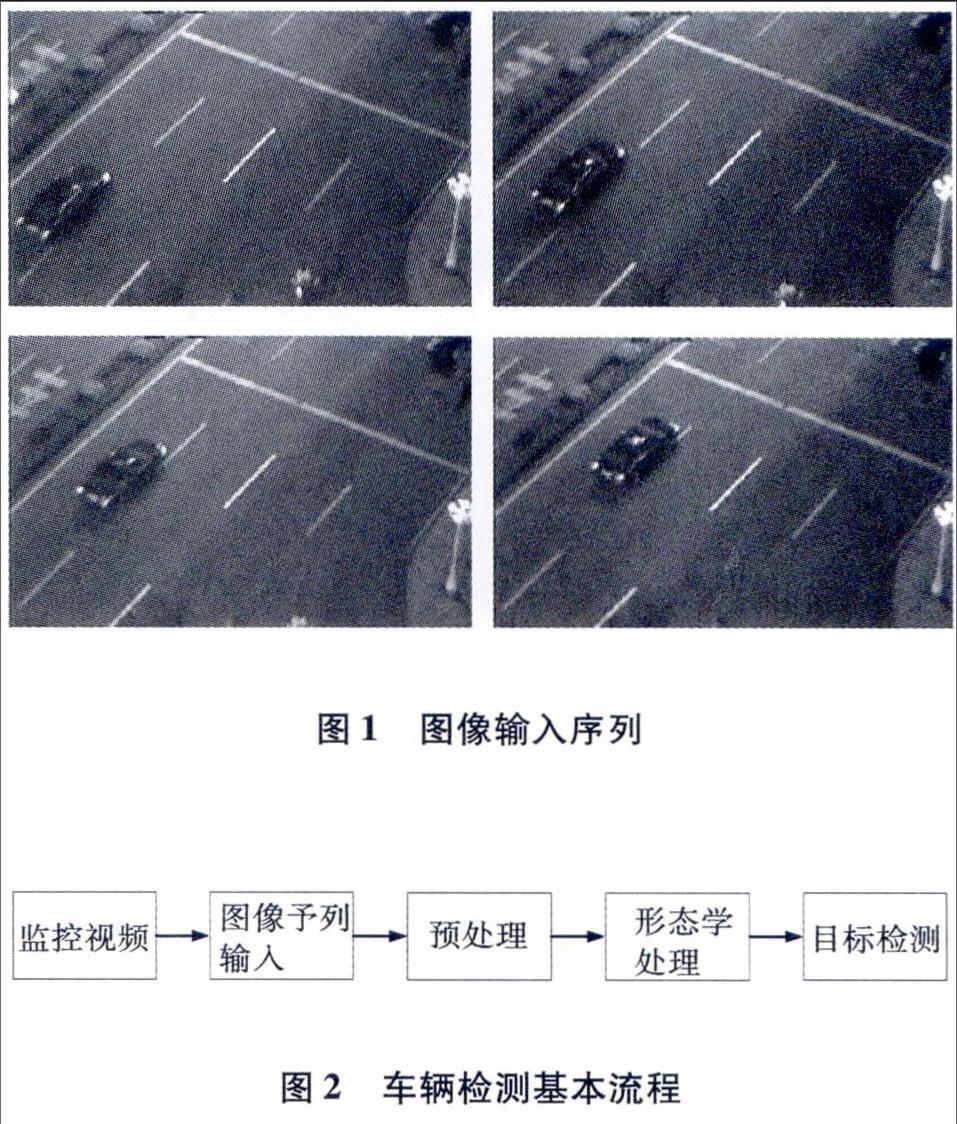
交通視頻的相近幀之間蘊藏著大量的車輛運動信息,如圖1所示,采用合適的方法將這些運動信息檢測和提取出來,就能夠達到提取場景內交通參數的目的,圖2所示為車輛檢測的基本過程,首先需要從視頻中提取數字圖像序列,對每一幀進行預處理、形態學處理,最后進行目標的檢測,其中,對圖像的預處理以及形態學處理方法是整個車輛檢測算法的預備工作,
1.1圖像預處理
實際采集到的交通流視頻都會受到噪聲等的影響,會使得車輛檢測的準確率變差,所以,在進行檢測車流量之前,需要對圖像進行一系列預處理主要包括:灰度化、濾波、二值化等。
彩色圖像的灰度化:彩色圖像的數據量較大,為了減小運算量,提高后續算法的速度和應用實效,需要將彩色的交通流視頻圖像進行灰度化處理,本文算法采用工程中常用的加權平均法來對圖像進行灰
圖像濾波:在視頻圖片中,由于受到椒鹽噪聲影響,導致個別像素起伏較大,因此,還需要對其進行平滑濾波處理,為了實現快速車輛檢測,本文算法采用較為經典的中值圖像濾波,中值濾波的基本原理是利用一個滑動窗口,該滑動窗口依次滑過圖像的所有像素點,對滑動窗口內對應的像素點的灰度值進行排序,這些像素點灰度值的中值,即為中值濾波后圖像在該點的灰度值,計算公式為:
經過灰度化、圖像濾波、二值化處理以后,所得到的是包含車輛信息的二值圖像,其特點為背景變化較大的區域為1,較小的區域為0,也即有車輛通過時,在車輛覆蓋的區域內為1,其他區域為0,然而,由于受到環境噪聲、車輛色差等影響,導致得到的0、1區域與實際的情況存在偏差,需要對其進行進一步的形態學分割處理,
1.2形態學處理
由于車輛的某些部位與路面可能存在著灰度差別較小的情況,因此,二值化圖像含有很多的空洞,這些空洞較大時,檢測時會造成漏檢的情況,當空洞大到使一輛車的圖像破裂成不連通的兩塊甚至多塊的情形時,又會造成多檢的情況,此外,環境噪聲,如樹木的抖動,可能使得二值圖像產生一些少量的l,嚴重時也可能造成車輛計數增加,為了去除空洞以及其他噪聲的影響,還需要對二值圖像進行進一步的形態學處理,
常用的形態學處理方法有腐蝕、膨脹、開運算、閉運算等,腐蝕算法可以用來消除圖像上微小而無意義的物體,主要用于消除噪聲,如圖3所示(白色部分為l,黑色部分為0),其基本原理是用結構元素掃描圖像中的每一個像素點,用結構元素與其覆蓋的圖像區域的像素點相與,若結果全為l,則圖像中該像素點為1,否則為0,膨脹運算可以將目標圖像邊界向外擴張,從而彌合目標圖像中存在的裂縫和空洞,主要用于處理二值圖像中的空洞,如圖4所示(白色部分為1,黑色部分為0),其基本原理是用結構元素掃描圖像像素點,和圖像像素點做“或”運算,若結果全為O,則圖像該像素點為0,否則為1
實際應用中單獨運用腐蝕或膨脹運算難以達到理想的效果,因而往往采用膨脹和腐蝕組合起來方法對圖像進行形態學處理,先對圖像進行膨脹運算,而后再進行腐蝕運算的過程稱為閉運算,閉運算可以有效消除二值化圖像中的空洞和裂縫,因此,本文算法的車流量檢測系統中采用閉運算對二值圖像進行形態學處理,以提高檢測性能,
2.車輛檢測算法
運動車輛的檢測算法是基于視頻的車輛檢測系統的核心和關鍵,本文提出了基于檢測線的背景差分方法,該方法通過劃定檢測線的方式,將所有的圖像預處理、形態學處理、目標檢測等全部集中在檢測線上進行處理,與傳統基于整個畫面的檢測方式相比,具有極低的復雜度和較高的檢測概率,本文的車流量檢測算法的流程圖如圖5所示,
首先讀取視頻,將其轉化為灰度圖像,讀取事先設置好的檢測線坐標上的圖像數值,進行中值濾波、二值化處理、形態學處理,最后判定車輛,從而實現車流量檢測和車速的監測。
2.1檢測線的設置
劃定檢測線是本文算法的關鍵環節之一,在車道上設置一條與車道垂直的虛擬檢測線,其作用類似于埋設于公路上的感應線圈,當視頻圖像中有車輛目標通過檢測線時,檢測線上的像素值就會發生變化,通過的物體越大,檢測線上發生變化的像素點數目就會越多,設定一個閾值,通過統計發生變化像素點數目是否超過閾值來判斷是否有車輛通過檢測線,
虛擬檢測線的長度以及具體的放置位置應該根據車輛行駛路線和道路的具體情況確定,如圖6所示,其中第一條為車輛的進入檢測線,第二條為車輛的離開檢測線,檢測線的具體原則有以下幾點:
1)檢測線應設置為與車道垂直;
2)寬度與車道寬度相同;
3)盡量避開樹木等干擾物;
4)進入和離開檢測線之間的寬度小于最小車距。
在上述檢測線劃定的基礎上,為了提高檢測率,本文算法將檢測線進一步改進,將其劃定為寬檢測線,如圖7所示,
具體方法為根據檢測線穿過的像素網格,向上下進行擴展,按順序將像素值保存在一維數組中,圖7中,經擴展以后的線寬為3,
2.2目標的判別和速度的測量
對于目標的判別,可以利用二值化以后的數組,當檢測線上的目標像素為1的點數大于某一閾值時,即認為檢測線上有車輛目標經過,當目標先后通過進入線和離開線時,判定有目標,否則判定無車輛,顯然,在判定過程中,閾值取得過大,則可能造成漏檢;閾值取得過小,則會將行人、自行車、摩托車或其他干擾等判斷為車輛,造成多檢,閾值可以采用相對值,即相對于車道的寬度值,由于通常情況下,車輛占用車道的寬度比例相對較為固定,采用相對值,可以提高檢測的正確率,
對于速度的測量,可以記錄目標通過車道進入線的時間t1(從視頻幀時間得到)和通過車道離開線的時間t2顯然,車速的計算公式為:其中s表示進入線和離開線之間的實際距離,
2.3差分背景的建立與更新
差分背景的建立與維護是實現本文算法的另一個關鍵環節,背景差分的基本原理就是利用幀圖像與背景圖像之間的差值來判斷圖像中是否存在車輛以及車輛的運動信息,背景圖像的選擇對背景差分的效果有直接的影響,對于初始背景的建立,本文采用對前Ⅳ幀圖像求平均的方法,獲取初始背景圖像:
提取背景后,就可以對視頻圖像進行差分運算處理,但是實際路面背景是隨時間變化的,為了適應這種變化,算法中的背景圖像也應該隨著時間而更新,算法采用加權的背景更新的算法,更新策略為:
其中:Bk(i.j)表示第K幀之后的背景;fk(i.j)表示第K幀圖像;a表示當前幀在背景更新中的加權系數,一般情況下,α可取值為O,1,顯然,上述更新過程中,當有車輛通過時,不更新背景;當沒有車輛通過時,對背景進行加權更新,利用上述方法獲取背景圖像后,即可獲取差分圖像
3.實驗結果與分析
為了驗證本文算法的可行性,利用實際的交通路口視頻進行實驗,對比本文算法與傳統算法的準確率、復雜度等,
3,1評價標準
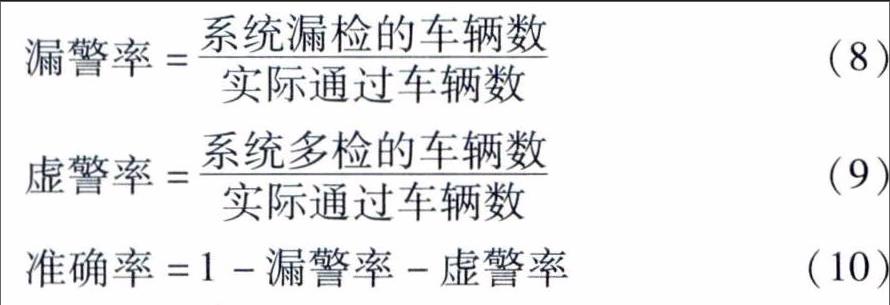
為了測試系統的實際檢測準確率,將算法檢測的車輛數和人工計數車輛數進行比較,用漏檢率、虛警率、準確率這3個指標來評價系統的檢測效果,其各自定義如下:
3,2檢測概率對比分析
采用某路段同一監控點的白天和夜晚的交通流視頻來對本文算法進行測試,實驗結果如下表所示:
從表1和表2的檢測結果中可以看出,本文的車流量檢測算法的檢測準確率在白天達到91.9%,夜間達到88.3%,與文相比,分別提高了3.6%和3.4%;與文相比,分別提高了2.4%和2.5%,其主要原因是本文采用了寬檢測線方法,所有的檢測都在線上進行,避免了整個圖像背景噪聲抖動對檢測的影響,且所采用的去噪方法較好的抑制了噪聲的干擾,
3.3計算復雜度對比分析
從計算量來說,若視頻圖片像素大小為N×M維的,則算法輸入的數據量一般為N×M級別,而本文算法通過劃定檢測線,根據檢測線劃定的方向,所需要參與計算的數據量約為n×M,其中n為檢測線的寬度,由于n《N,顯然計算量較傳統算法大為減少,
4.結論
車流量、車速等是交通管理和擁堵預警所需的基本信息,本文結合實際需要,提出了一種快速車流量檢測方法,通過劃定寬檢測線,大大減少了算法復雜度和系統開銷,算法實驗表明,本文算法可以實時、準確地檢測出交通流視頻圖像中的車輛,檢測的準確率明顯提高,具有較好的適應性和性。
