城市規劃與建筑虛擬現實多通道投影系統的研究與實現
2016-11-12 03:38:07王曉紅綿陽職業技術學院四川綿陽621000
安徽建筑 2016年2期
關鍵詞:系統
王曉紅(綿陽職業技術學院,四川 綿陽 621000)
城市規劃與建筑虛擬現實多通道投影系統的研究與實現
王曉紅(綿陽職業技術學院,四川 綿陽 621000)
文章針對城市規劃與建筑中不能準確實現規劃目的,提出建立以沉浸式顯示和實時交互為主要功能的虛擬現實實驗室環境與新一代數字媒體科技創新平臺,該平臺采用基于OpenGL工業級三維圖形標準的虛擬現實軟件作為二次開發的高層API,重點論述了三維沉浸式顯示系統中多通道投影的方法。實驗結果表明,利用該方法可以實現地形建模的要求,為實際施工提供準確的信息,可以達到最初的設計規劃目的。
虛擬現實;沉浸式顯示;OpenGL;多通道投影
1 概 述
虛擬現實技術可用于建筑視景與數字城市規劃、虛擬制造/設計/裝配及虛擬維修應用、駕駛模擬仿真訓練、文物古跡數字復原保護、人工智能及遠程控制操作、地形地貌/地理信息系統(GIS)、生物工程(基因/遺傳/分子結構研究)、虛擬地質/礦產/石油勘探等領域的教學科研工作。我國城市化進程正在加速,四川災后建設任務繁重,建筑與城市規劃設計行業人才的需求量旺盛,對人才培養規格的要求越來越高,虛擬現實技術應用于建筑與城市規劃教育領域便可提供這樣一個綜合型的高技術教學環境。虛擬現實實驗室使建筑設計、城市設計等創作研究在參與、體驗及交互的過程中進行,是對傳統設計過程的顛覆,建設虛擬現實實驗室,將有力地推進設計實驗教學內容、教學體系、教學方法和教學手段的重大變革。虛擬現實方法還可成為分析研究地震破壞與災后建設研究的重要技術手段。通過模擬地震發生場景,對自然環境要素與人工環境要素進行參與式與體驗式的分析研究;可參與災后自然環境與人工環境的恢復建設各個領域的技術研究。本文針對城市規劃和四川災后重建,采用基于OpenGL工業級三維圖形標準的虛擬現實軟件建立城市規劃與建筑虛擬現實仿真實驗平臺,更好地呈現虛擬現實技術的特點,為實際設計和建筑提供理論依據。
2 開發與渲染平臺
采用高性能的QUADRO PLEX系列專業虛擬現實工作站作為圖像生成處理的硬件開發平臺。軟件平臺部分采用基于OpenGL工業級三維圖形標準的虛擬現實軟件作為二次開發的高層API,用于建立三維圖形場景驅動和軟件開發環境。
3 三維沉浸式顯示系統
沉浸式場景漫游系統通常采用頭盔式顯示器、洞穴式立體顯示裝置等設備[1],它封閉我們參與者的感覺器官、聽覺器官和視覺器官,為參與者提供一個全新的、身臨其境的虛擬空間,并利用空間位置跟蹤定位設備、數據手套、其他手控輸入設備、聲音設備等。使得參與者產生一種完全投入并沉浸于其中的感覺,是一種較理想的虛擬現實系統[2]。其系統結構及工作流程圖如圖1所示。

圖1 系統結構與工作流程圖
3.1 多通道投影系統幾何校正
所謂的多通道投影系統,就是由多個投影機拼接在一起,但這種拼接,不是簡單的擺放,而是按照一定的空間位置有規律的排列,從而在頭盔式顯示器大屏幕上顯示出具有邏輯上一致的全景模擬圖像。但這種多通道投影有兩個關鍵問題需要解決。
第一,圖像被投影到弧形幕或球幕上時會發生幾何變形(即非線性失真),因此需要對投影圖像進行幾何校正[3]。
第二,多個投影機的投影圖像拼接在一起時,它們的邊緣部分會有一定程度的重疊,重疊區的亮度是非重疊區亮度的2倍,因此需要實現投影圖像間亮度的平丫冷過渡,即邊緣融合[4]。
OpenGL幾何校正
①幾何校正的基礎就是要求投影儀生成的正常圖像和幾種輔助調試的畫面能準確投影到弧形幕或球幕上。
②幾何校正最為關鍵步驟是在弧形幕或球幕上生成能與我們在實際投影曲面有一模一樣的貼圖曲面。為了最大程度地減少因投影幕施工人為因素而造成變形的影響,并且方便后續的貼圖處理。在處理復雜的問題時候,我們往往將其簡單化,采取片狀網格投影曲面的方式,把它們簡化為N行和N列。假如投影曲面的某一處的曲率值與標準弧不同時,我們可以通過調整該處與之相對應的網格外形的方法來使投影幕的外形與其適應和一致。片狀網格與投影屏幕的擬合度成正比,如果片狀網格的行與列劃分得越精細、網格數量越多,那么幾何校正的效果就越好。還有一個影響失真的是投影儀與視點的空間幾何位置,如果他們不保持一致,也會產生失真。通過調整網格外形、投影儀與視點的空間幾何位置,才會使得重新生成的畫面不失真。
③對幀緩存的復制。作為貼圖,我們按照投影屏幕行列詳細劃分的份數,對其進行網格化紋理處理,然后依次貼在與之相對應的網格曲面上。在幀緩存的復制,圖像紋理化的處理、貼圖等操作過程時需要在一幀的時間之內全部完成,所以這就需要我們在失真可接受的范圍之內盡可能減少對片狀網格數的劃分數量,保證在有限時間內完成對幀緩存的復制。[5]
3.2 虛擬場景(Virtual scene)與真實數據融合
虛實配準問題是增強現實或沉浸式虛擬現實的關鍵技術。實現虛擬信息與真實場景或數據的正確匹配或有機結合是每個增強現實應用系統或沉浸式虛擬現實系統都必須完成的一項重要任務[6]。在這個重要任務中,其核心就是圖像的邊緣融合。問題是怎么樣使投影重疊區之內 2臺或者多臺投影儀的輸出亮度同單臺投影儀輸出的亮度一模一樣。
通過視景貼圖融合、適當變換貼圖曲面邊緣亮度,可以得到圖像亮度在屏幕重疊區如何變化,經過實驗得出是其按照二次曲線遞增或者衰減,并且其相鄰的圖形圖像邊緣亮度變化防止了圖像的失真,相互之間形成互補保證圖像清晰。文章采用的是典型的二次曲線,其亮度變化如圖2所示。由圖可以看出,右側投影亮度邊緣融合區域隨著距離從 0逐漸變化到1,左側投影亮度邊緣融合區域隨著距離從1變化到0。經過這樣處理就完成了圖像的全部邊緣融合。
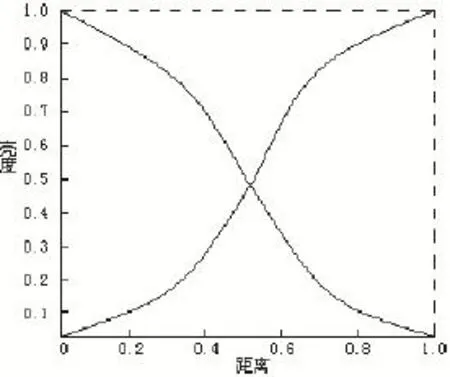
圖2 亮度變化曲線示意圖
因為實驗場地的坐標系與虛擬場景的坐標系在坐標軸的方向、坐標原點的差別,還有就是他們的方向是右手系還是左手系都會有不同,所以為了實現虛實配準,需要對系統的輸出數據進行跟蹤處理,即就是坐標變換。
當頭部定位儀器戴在我們頭上時,相機此時位于頭頂并且朝著與地面方向垂直向上的,我們稱之為頭頂相機。在沉浸式場景漫游系統中,我們的第一人稱相機是跟人眼位置和姿態都一樣的相機。所以,在沉浸式場景漫游系統中來模擬人眼的時候,我們添加一個向前的相機,其實這個相機是完美虛構的。按照視覺原理,可以標定得到向前相機相對頭頂相機的位置變換矩陣。下面是4種坐標系的定義,如圖3所示。
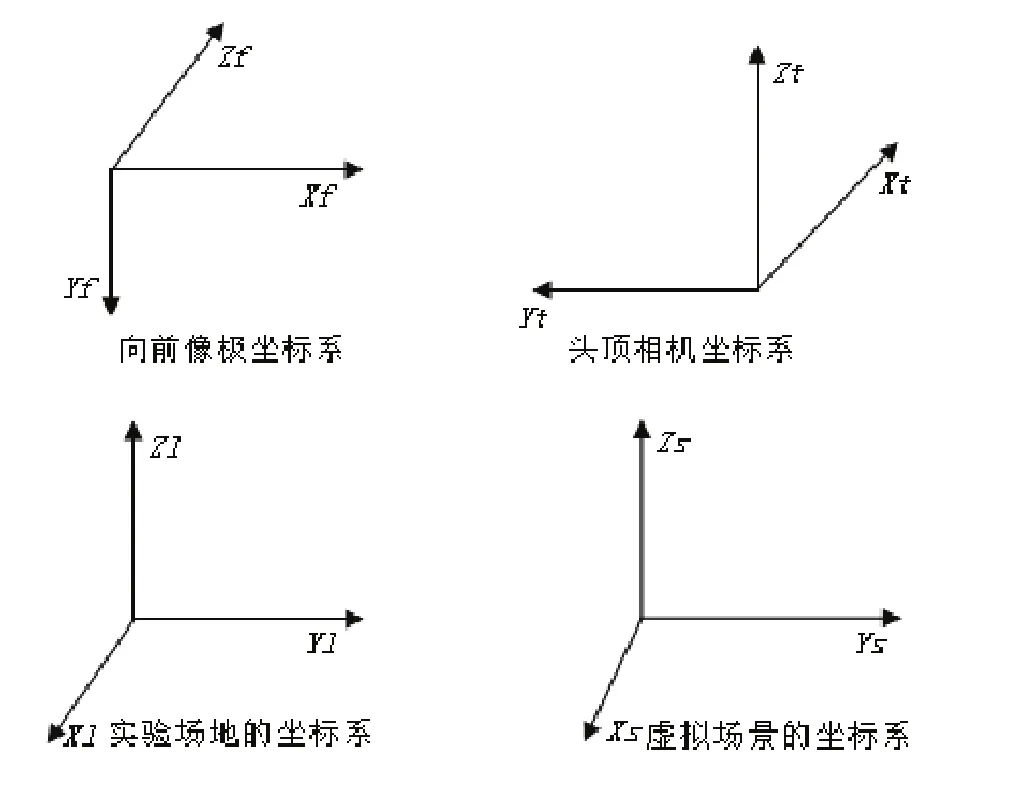
圖3 4種坐標系的定義圖
下面,分四個步驟來進行坐標變換:
第一步,調用高性能高精度的攝像機跟蹤定位系統的接口,從中得到頭頂攝像機的準確定位,也就是頭頂攝像機在實驗場地坐標系下的姿態和位置。用矩陣表示為
第二步,由高性能高精度的攝像機跟蹤定位系統標定的向前攝像機相對頭頂攝像機的坐標變換矩陣通過計算可以得出向前攝像機在實驗場地坐標系下的姿態和位置,可以表示為用下列公式表示:

第三步,由實驗場地坐標系與虛擬場景坐標系之間的換算關系,我們可以得到坐標變換矩陣通過計算可以得出頭頂攝像機和向前攝像機在虛擬場景坐標系下的姿態和位置,分別表示為和用下列公式表示:

第四步,使用軟件里的數據庫步函數設置向前和頭頂2個攝像機的姿態和位置。
4 結 論
在文獻[6-10]的基礎上,根據城市規劃與建筑虛擬現實建模的特點,提出了基于OpenGL工業級三維圖形標準的虛擬現實軟件建模的方法,以三維沉浸式顯示系統詳細研究為重點,闡述了沉浸式場景漫游系統中多通道投影的幾何校正和虛擬場景與真實數據融合的解決方法,實驗結果表明技術路線可行,可以達到虛擬現實仿真的要求。該方法對于構建城市復雜地形建模具有一定的指導意義。
[1]趙維,謝曉方.基于自由行走的沉浸式漫游裝置[J].計算機工程,2009,35(15):265-269.
[2]Adams L.Visualization and Virtual Reality[M].McGraw-Hill Publishing,1993.
[3]胡文聰.多投影增強現實系統的研究[D].上海:上海交通大學,2009.
[4]何躍明.多投影大屏幕系統的自動構建方法[D].杭州:浙江大學,2007.
[5]李新.水電站虛擬環境中的沉浸式人機交互技術研究[D].南京:南京理工大學,2011.
[6]字建香.高精度定位跟蹤系統輔助下的沉浸式場景漫游系統構建[D].北京:中國地質大學,2012.
[7]吳華興,康鳳舉,黃偉,等.基于虛擬現實環境的飛機顯控系統軟件仿真[J].系統仿真學報,2012,24(6):1232-1235.
[8]朱翠蘭,董明曉,邱魯江,等.塔式起重機視景仿真系統場景建模與驅動[J].山東建筑大學學報,2012,27(3):284-288.
[9]徐剛,王春燕.基于虛擬現實建模語言的醫學體數據三維重建研究[J].自動化與儀器儀表,2012,162(4):38-40.
[10]段紅霞.虛擬現實技術在工程建設管理中的應用[J].青島理工大學學報,2012,33(3):35-38.
TU17
A
1007-7359(2016)02-0245-03
10.16330/j.cnki.1007-7359.2016.02.087
王曉紅(1968-),女,四川綿陽人,高級工程師。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32