對鍋爐汽包水位控制方案的初步探討
2016-11-14 09:06:16史志慧高魯
橡塑技術與裝備 2016年4期
關鍵詞:信號
史志慧,高魯
(錫林郭勒職業學院,內蒙古 錫林浩特 026000)
對鍋爐汽包水位控制方案的初步探討
Preliminary study of boiler drum level control scheme
史志慧,高魯
(錫林郭勒職業學院,內蒙古 錫林浩特 026000)
鍋爐是工業發展過程中重要的熱能動力設備,汽包水位作為鍋爐重要的被控變量,對其進行自動控制十分必要。鍋爐的水位調節過程具有很強的滯后性和波動性,因此應用復合調節方案對汽包水位調節更具實用性。在本文中主要以火電廠鍋爐為背景,應用仿真軟件,對汽包水位PID控制系統進行仿真,并對以上三種控制方案進行了比較。
鍋爐汽包水位;PID控制系統;仿真實例分析
火電廠鍋爐汽包水位控制目的是使給水流量與蒸汽流量相符合,維持鍋爐汽包水位在額定范圍內。汽包內水位過高,導致汽水分離效果變差,引起蒸汽內含鹽量增高,蒸汽品質惡化;汽包水位過低,導致循環流動壓頭降低、汽水循環變差,嚴重時,還可能造成汽包干燒和水冷壁破裂等停機事故。因此,實現對鍋爐水位的自動控制,可以提高電廠機組的安全性、經濟性。
1 鍋爐汽包水位PID控制器原理
PID控制器是比例(Proportional)控制單元、積分(Integrative)控制單元、微分(Derivative)控制單元三者組合的簡稱。
比例控制單元:主要顯示輸入與輸出誤差信號之間的比例關系,即:u=Kpe, Kp為比例系數, Kp直接影響系統的響應速度和精度。
積分控制單元:主要用于消除穩態誤差,增大系統的無差度,即:Ti為積分時間常數,Ti直接影響積分作用的強弱。
微分控制單元:主要用于改善系統的動態特性,控制器的輸出與輸入誤差信號的微分成正比關系,即:Td為微分時間常數,Td主要控制響應誤差的超調現象。
2 鍋爐汽包水位PID控制方案
2.1 單沖量控制系統
單沖量控制系統是汽包水位自動控制系統中最簡單、最基本的方式,它將汽包水位測量信號經變送器送到水位控制系統中,水位控制器根據測量值與規定值的偏差調節給水閥門,通過改變給水流量使汽包水位保持在規定范圍內。對于負荷變化較大的機組,單沖量控制系統不能適用。
2.2 雙沖量控制系統
雙沖量控制系統是以蒸汽流量信號作為前饋信號,以水位信號作為反饋信號的控制系統。引入蒸汽流量前饋信號后,當蒸汽流量改變時,該調節系統的調節器可以使蒸汽流量與給水流量同向變化,這樣可以減少或抵消“虛假水位”現象引起的問題。但是這種控制系統要等汽包水位信號發生變化后才能動作,滯后時間長,水位波動大。
2.3 三沖量控制系統
三沖量控制系統是以汽包水位為主控制信號,蒸汽流量為前饋控制信號,給水流量為反饋控制信號組成的控制系統。從結構上來說,三沖量控制系統實質上是一個帶前饋信號的串級控制系統。其中串級控制系統回路包括:由給水流量、給水變送器、調節器和調節閥組成的副控制回路;由汽包水位調節對象和副控制回路構成的主控制回路。蒸汽流量及其蒸汽變送器的引入并不影響主、副控制回路的穩定性,但是可以提高控制系統的控制品質。
3 鍋爐汽包水位PID控制方案實例
3.1 鍋爐汽包水位控制
本文所引用的是基于PID算法的MATLAB—SIMULINK仿真模型,在此控制系統中主、副控制器都設定為PID控制器。 PID 控制器的經驗公式為:及、Ti=1.8τ、Td=0.5τ(其中k、t、K分別為對象模型的開環增益、純滯后時間常數和慣性時間常數)整定三種不同控制方式的控制器參數。將主、副控制器封裝入不同的控制系統中,有不同的控制結果。所用參數:Kp1∈(17-22)、Ki1∈(0.4-0.5)、Kd1∈(4.2-4.8)、Kp2∈(12-14)、Ki2∈(25-27)、Kd2∈(0.01-0.02);輸入為階躍信號。
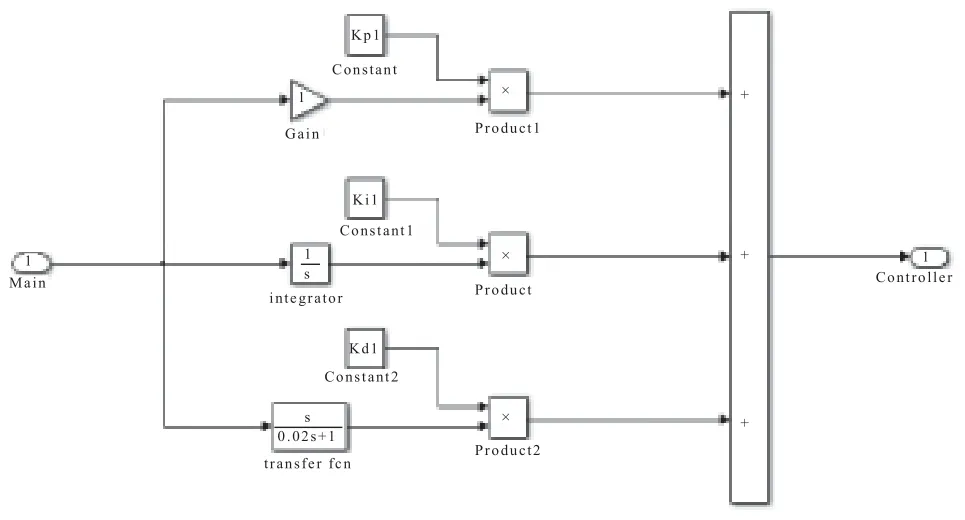
圖1 主控制器
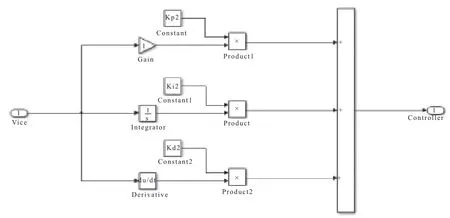
圖2 副控制器
3.2 級雙沖量鍋爐汽包水位控制系統仿真模型
主控制器(PID1)與蒸汽流量信號(前饋)、汽包水位信號(反饋)共同構成單級雙沖量鍋爐汽包水位控制系統。(圖3、圖4)
3.3 單級三沖量鍋爐汽包水位控制系統仿真模型
主控制器(PID1)與蒸汽流量信號(前饋)、汽包水位信號(反饋)、給水流量信號(反饋)共同構成單級三沖量鍋爐汽包水位控制系統(圖5、圖6)。
3.4 串級三沖量鍋爐汽包水位控制系統仿真模型
主控制器(PID1),副控制器(PID2)與蒸汽流量信號(前饋)、汽包水位信號(反饋)、給水流量信號(反饋)共同構成串級三沖量鍋爐汽包水位控制系統(圖7、圖8)。
3.5 結論
(1)從仿真響應曲線可以看出三種調節系統在相同階躍輸入的情況,如表1。
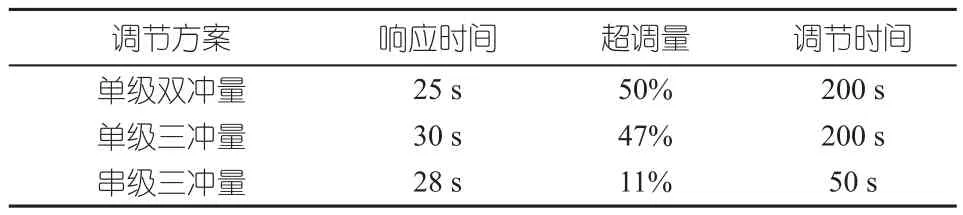
表1 三種調節系統在相同階躍的輸入情況
(2)單級三沖量振蕩小于單級雙沖量,調節時間短于單級三沖量;串級三沖量調節系統不僅超調量最小,響應快,振蕩小,平穩性好,調節時間相對最短,穩態誤差也最小。以上說明,串級三沖量調節系統為三種調節系統最優。

圖3 單級雙沖量控制系統結構圖
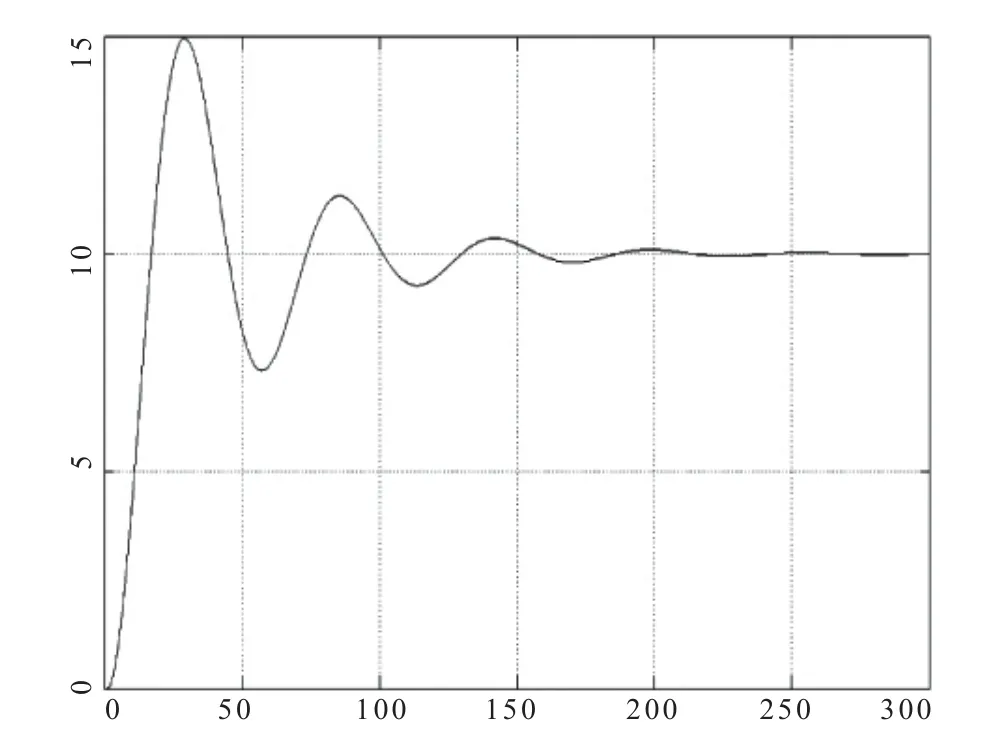
圖4 單級雙沖量PID控制系統響應曲線

圖5 單級三沖量控制系統結構圖
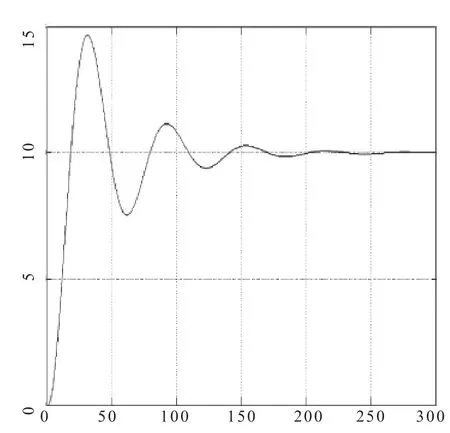
圖6 單級三沖量控制PID系統響應曲線

圖7 串級三沖量控制系統結構圖
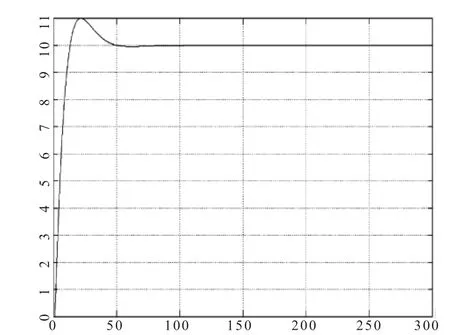
圖8 串級三沖量PID控制系統響應曲線
[1]楊獻勇. 熱工過程自動控制[M]. 清華大學出版社,2000 年.
[2]孫優賢,孫紅. 鍋爐設備的自動調節[M]. 化學工業出版社,1982.5.
[3]陶永華. 主編新型PID控制及其應用[M]. 機械工業出版社,2002.
[4]陳平. 一種基于模糊PID控制的鍋爐汽包水位控制方法. 福建工程學院學報,2006,4,83~84.
[5]劉金餛. 先進PID及其MATLAB仿真[M]. 北京:電子工業出版社,2003,49~82.
[6]王芳. 模糊自調整 PID 控制在鍋爐汽包水位控制中的應用[D]. 2006,山東大學碩士學位論文,1~6.
[7]樓順天,胡昌華. 基于MAI,LAB的系統分析與設計[M]. 西安:西安電子科技大學出版社,2001,12~57.
[8]呂廣紅. 基于模糊控制的鍋爐汽包水位串級控制系統[J]. 自動化與儀表,2004,16(2):15~18.
[9]海山. 鍋爐汽包水位的智能控制研究[D]. 內蒙古大學,2008,5:36~44.
(P-02)
日本和越南煉化開發出“無碳”橡膠
新近,日本和越南研究人員開發出出減少天然橡膠中蛋白質含量的新技術,可以生產高性能橡膠材料并且減少天然膠加工過程中的環境污染。該項目的目標是通過使用碳中和天然橡膠代替來源于石化資源的合成橡膠,降低二氧化碳排放。另外,此項目也開發出更加先進的橡膠加工廠水處理技術,有助于減少溫室氣體排放量,將甲烷恢復成可利用能源。此項目由河內科技大學、越南橡膠研究院、長岡技術科學大學共同開發,并得到日本國際協力機構與日本科學院的資金支持。
(燕豐供稿)
TK323
1009-797X(2016)04-0056-03
A
10.13520/j.cnki.rpte.2016.04.022
史志慧(1985-),女,助教,本科,研究方向為熱能與動力工程及高等職業教育。
2016-01-06
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06