臨近空間飛行器衛星信息傳輸系統的實現
2016-11-14 08:37:13高文生中國電子科技集團公司第五十四研究所
衛星與網絡 2016年4期
+ 高文生 中國電子科技集團公司第五十四研究所
臨近空間飛行器衛星信息傳輸系統的實現
+ 高文生中國電子科技集團公司第五十四研究所
給出了臨近空間飛行器衛星信息傳輸的一種實現方法,簡述了系統組成和工作原理,對關鍵技術進行了分析,并給出了試驗結果。
臨近空間 艇載衛通站 前向鏈路 返向鏈路 散熱
1 概述
臨近空間是指距地面20~100km、介于天空和太空之間的空域,那里空氣稀薄,氣象狀況比較單純,常規的飛行器難以到達這個高度活動,戰略地位重要。飛艇、浮空氣球等飛行器可在臨近空間長期駐留或者巡游,執行情報收集、偵察監視、通信保障等任務。
臨近空間飛行器駐空時間長,活動范圍往往超出無線電通視范圍,采用視距鏈路不能實現地面站與飛行器的通信要求,而衛星中繼數據鏈路具有通信距離遠、通信不受地埋條件限制等優勢,是超視距情況下飛行器與地面站信息傳輸的最佳手段。
某無人浮空飛艇工作在臨近空間,最大升限24000米,在飛艇上安裝衛星通信設備(簡稱艇載衛通站),地面配置相應的地面衛通站,采用衛星中繼手段,可以實現地面和飛艇之間超視距情況下的遙控、遙測數據和其它載荷信息的傳輸。
2 系統設計
2.1 系統組成和工作原理
地面控制站和飛艇之間的信息交互包括:地面站向飛艇發送4kbps的遙控信息,用于飛艇的飛行控制和設備參數的設置;飛艇向地面站發送2.048Mbps的復合信息,用于傳輸壓縮視頻流、飛艇狀態和設備狀態等復合信息。
為此,設計Ku頻段衛星信息傳輸系統,使用Ku頻段商用通信衛星,實現飛艇和地面站之間的信息傳輸。衛星信息傳輸系統由艇載衛通站、衛通地面站、以及所使用的Ku通信衛星組成。地面站到飛艇的信息傳輸稱為前向鏈路,前向鏈路信息流程為:遙控指令信息送Ku頻段衛通地面站進行擴頻、調制、變頻、放大并發向衛星,經衛星轉發器轉發,發向艇載衛通站;艇載衛通站接收、放大、變頻后,送解擴解調器恢復出遙控數據流送到艇載控制設備。飛艇到地面站的信息傳輸稱為返向鏈路,返向鏈路信息流程為:艇上載荷信息、飛艇狀態信息和設備狀態信息等復接成復合數據,輸入到調制器進行信道編碼、調制,變頻為中頻信號后送入Ku頻段射頻單元,射頻單元經過變頻放大,由天線發向衛星,經衛星轉發器轉發,傳送到Ku頻段衛通地面站,地面站接收、放大、變頻后,送解調器恢復出基帶復合數據,送到地面控制站進一步解析。
系統組成和工作示意圖如圖1所示。
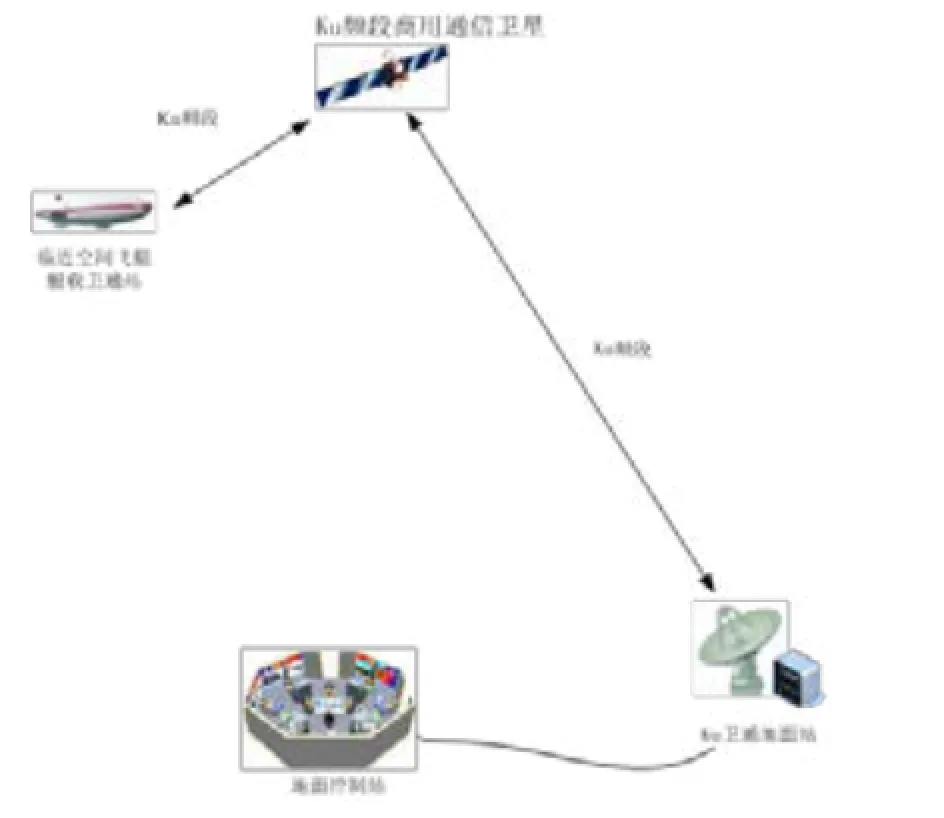
圖1 臨近空間飛艇衛星信息傳輸系統工作示意圖
2.2 技術體制
前向鏈路傳輸地面對飛艇的遙控指令信息,安全性要求高,需要具有較好的信號隱蔽性和較強的抗干擾、抗截獲能力,且傳輸速率相對較低,選用直接序列擴頻的碼分多址(CDMA)方式。通過對信號進行擴頻處理,降低發送信號的功率譜密度,減少在任務期間被發現的概率,并具備一定的抗干擾能力;采用擴頻方式還可以實現多載波復用,當一個地面站對多個飛艇通信時時,多個飛艇的前向鏈路可通過采用不同的擴頻碼,占用相同的載波頻率,有效節省系統占用帶寬。
返向鏈路采用FDMA多址方式,當多個飛艇工作時,每個飛艇分配獨立的載波,地面站對應配置相應的解調終端,載波分配和資源管理流程簡單,系統的配置比較明確。
考慮到衛星帶寬資源的限制,為提高帶寬利用率,系統采用功率效率較高的QPSK調制、相干解調方式。
在編碼方式的選擇上,由于艇載衛通站體積和功耗受限,天線增益低,發射機輸出功率受限等因素,造成艇載發射EIRP值不高,因此需采用高增益的糾錯編碼方式,以盡可能降低系統的解調門限載噪比。為此,信道編碼選用1/2 LDPC碼,LDPC碼全稱為低密度奇偶校驗碼,是一種稀疏線性分組碼,可以有效地降低解調門限,提高鏈路傳輸性能,使用1/2 LDPC編碼方式,在誤碼率為1×10-6時,信號的解調門限為4dB(Eb/ N0)。另外,LDPC碼本身具有交織特性,能糾正突發錯誤,避免了因加入外部交織而帶來的編譯碼延遲。同時該編碼方式還具有譯碼速度快,吞吐率高的優點。
2.3 系統傳輸能力
通過鏈路計算,正確配置衛通站的技術參數,保證系統輸出端信號的誤比特率(也稱誤碼率)滿足要求。鏈路計算的核心是系統載噪比的計算,與系統載噪比相關的因素包括衛通站發射EIRP值、接收站的G/T值、傳輸過程中的各種損耗和引入的各種噪聲及干擾。
系統選用普通商用衛星,工作區域的轉發器參數選取見表1。
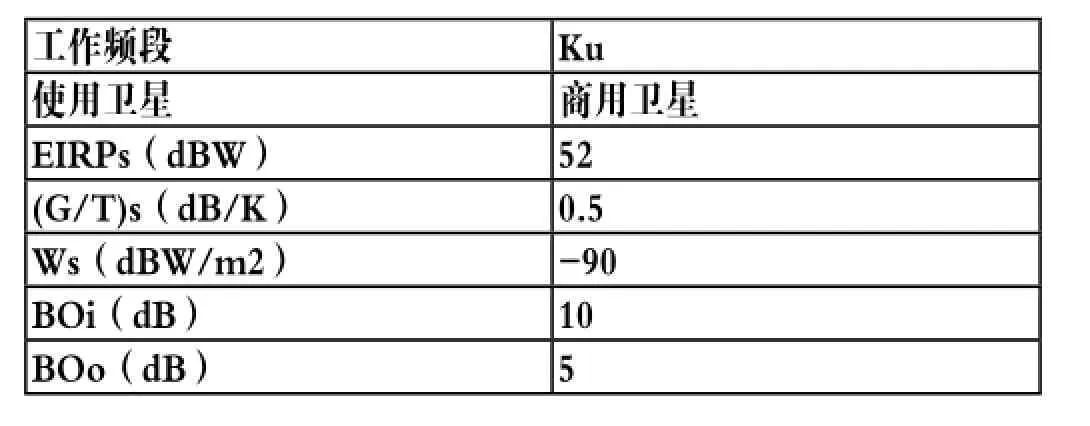
表1 衛星轉發器參數選取
艇載站受到空間限制,配置了0.6米口徑拋物面天線,為彌補艇載EIRP值的弱點,地面站配置了6.2米大口徑拋物面天線。艇載天線和地面天線的發射和接收性能見表2。
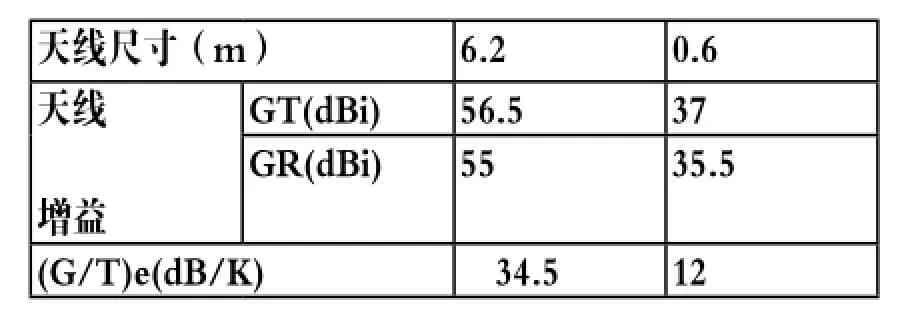
表2 天線技術指標
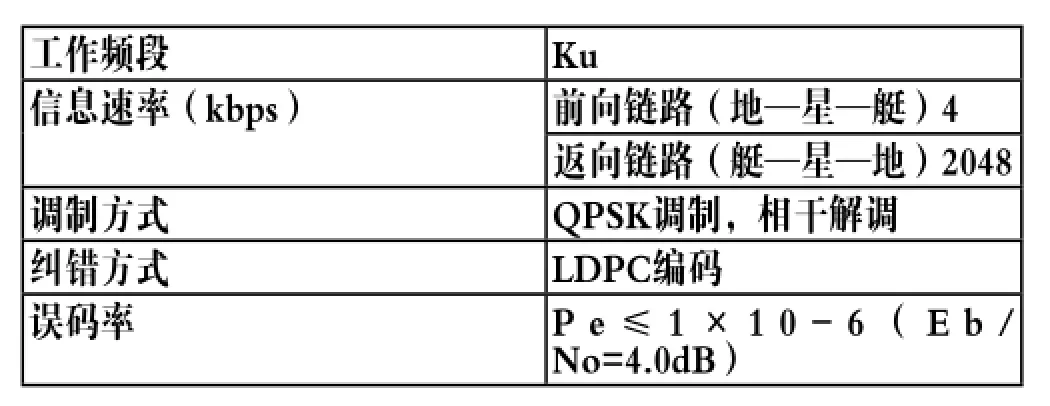
表3 傳輸參數
以上參數確定后,通過計算系統載噪比,可以算出信道容量和每信道所需發射站的功率。在進行鏈路計算時,需要考慮降雨影響,由于飛艇在遠高于云層之上工作,故可不考慮飛艇到衛星之間的降雨影響,僅考慮衛星到地面站之間的降雨影響。此外,系統還為不可預測因素預留了3dB余量。
通過計算, Ku返向鏈路傳輸2.048Mbps信息時,艇載所需的輸出功率為37.1W,艇載站配置了Ku頻段40W發射機,可以保證返向信息的正確傳輸。前向信息速率為4kbps,地面站所需的輸出功率小于1W,考慮到地面站要兼具信息轉發的功能,配置了20W發射機,完全滿足系統需求。
2.4 站型方案
1)艇載衛通站
艇載衛通站由Ku頻段0.6米口徑天線單元、射頻單元和數據處理單元組成。設備組成和工作原理如圖2所示。
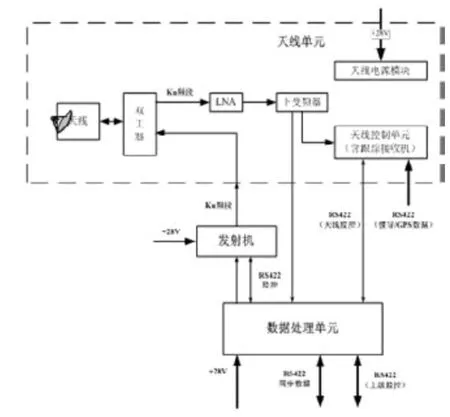
圖2 艇載衛通站組成和工作示意圖
Ku頻段艇載天線為直徑0.6m賦形環焦天線,由于飛艇平臺較穩定,天線采用程序引導加步進跟蹤的跟蹤方式,能夠保證天線1/5波束寬度的跟蹤精度。天線座架采用A-E型座架,天線姿態控制采用陀螺加前饋補償伺服穩定控制策略。
射頻單元包括Ku頻段LNA、下變頻器、Ku 頻段40W發射機等設備。完成信號低噪聲放大、頻率變換和功率放大等功能。
數據處理單元包括調制解調單元和接口監控單元,主要完成業務接入、前向信息的解調譯碼、返向信息的編碼調制和設備監控等功能。
艇載衛通站對外通過RS422同步數據接口接收飛艇復合數據,并向飛艇的飛行控制設備發送遙控指令數據,飛艇通過RS422異步數據接口對艇載衛通站進行監控,衛通天線單元通過RS422異步串口接收慣導和GPS數據,設備均使用直流28V供電。
2)地面衛通站
Ku衛通地面站由6.2米天線系統、射頻設備、終端設備以及供配電等輔助設備組成。設備組成與工作原理如圖3所示。
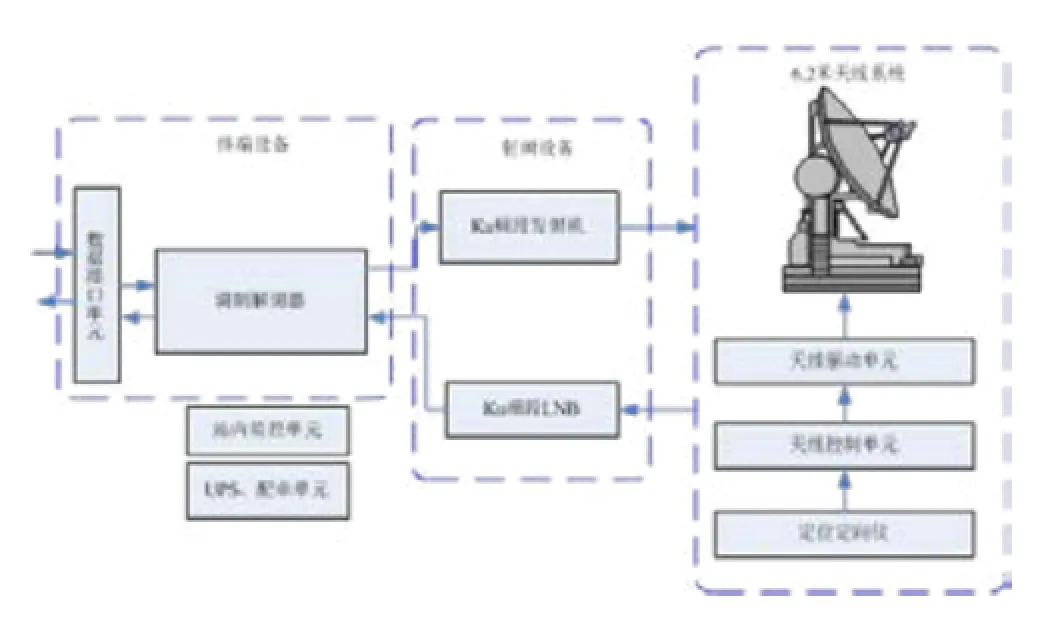
圖3 Ku衛通地面站組成和工作示意圖
3 關鍵技術
3.1 仿真分析
如何實現飛艇電子設備的散熱是系統實現的關鍵技術,艇載設備要求在高空24000米工作,在臨近空間,環境溫度為-55℃,絕對壓力為3.3KPa,空氣密度為0.038kg/m3,太陽輻射約為1000W/m2。由于空氣密度低,通過空氣對流散熱效率非常低,主要依靠傳導和輻射散熱,發熱體熱量散不出去,造成本身溫度很高。
艇載衛通站的主要發熱設備是Ku頻段40W發射機,總耗熱量為280W,發射機內部的功率放大模塊設置保護溫度為85°,超過這一溫度時,發射機將停止工作。
用Icepak軟件對艇載衛通站工況熱仿真建模,如圖4所示。對艇載衛通站在地面和臨近空間兩種環境條件下的散熱狀況進行仿真。
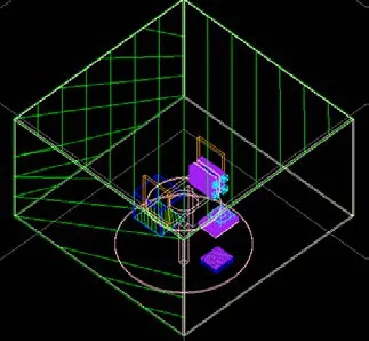
圖4 設備工況熱仿真建模
1)地面工作
考慮到地面聯試等情況,首先對發射機在地面工作進行仿真,地面環境條件為:最高環境溫度55℃,絕對壓力為一個標準大氣壓1.01×105Pa,空氣密度為1.0kg/m3,太陽輻射忽略不計。
設備在地面工作時,主要依靠強迫風冷散熱。根據設備的熱性能指標,對于Ku頻段40W發射機采用一個120mm×120mm軸流風機進行強迫風冷。仿真結果如圖5所示。
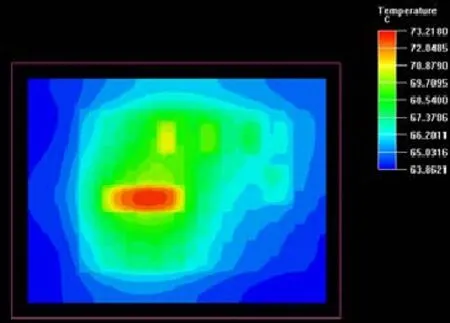
圖5 地面條件Ku頻段40W發射機溫度分布圖
由仿真結果可知,在地面工作時,Ku頻段40W發射機功率放大模塊最高溫度為73.2℃,設備能正常工作。
2)臨近空間工作
當發射機在臨近空間工作時,按飛艇升限24000米環境條件進行仿真,此時環境溫度為-55℃,絕對壓力為3.3KPa,空氣密度為0.038kg/m3,太陽輻射約為1000W/m2。Ku頻段40W發射機裝在天線座架上,仿真結果如圖6所示。
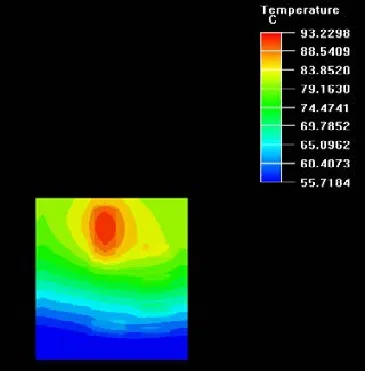
圖6 臨近空間條件Ku頻段40W發射機溫度分布圖
由仿真結果可知,在高空24000米工作時,Ku頻段40W發射機裝在天線座架上時,最高溫度為93.23℃,設備不能正常工作。
3.2 改進措施
為了使發射機能在臨近空間正常工作,采取以下改進措施:
1)在Ku頻段40W發射機功率放大模塊的底板鑲嵌熱管散熱器,建立低熱阻傳熱通道。 通過熱管傳熱通道將功率放大模塊工作時產生的熱量傳導至散熱器,熱量再經由散熱器輻射到外空間,并在熱傳遞路徑上各部件的接觸安裝表面均涂導熱脂, 降低熱阻,提高熱傳導效果;
2)加裝隔熱罩,隔離太陽光輻射。設備上面裝一個直徑為1.5米的玻璃鋼罩,它的底沿距底板0.25米,主要用于高空中隔離太陽輻射。在隔熱罩的外表面噴涂短波吸收率為0.17 、長波發射率為0.87 的SR107白漆作為熱控涂層,在發射機殼體、隔熱罩內表面、底板等部位噴涂高發射率的無光漆, 加強輻射散熱;
3)改變Ku頻段40W發射機安裝位置,將其由天線座架移到下面的天線安裝平臺上,將安裝平臺作為Ku頻段40W發射機散熱器的一部分,并使用高速風機,在空氣密度減小的情況下,提供較大的體積流量和質量流量。
采取以上措施后,再次在24000米環境條件對Ku頻段40W發射機進行熱仿真,如圖7所示,最高溫度為43℃,能正常工作。
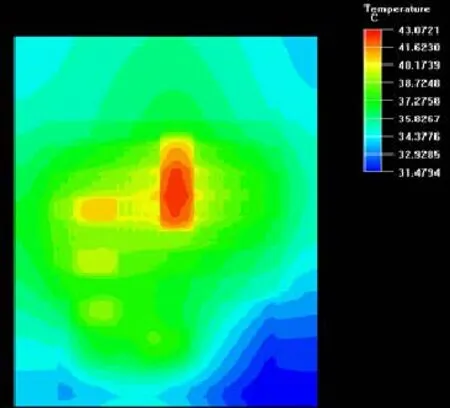
圖7 改進后高空條件Ku頻段40W發射機溫度分布圖
4 試驗結果
飛艇升空到15000米高度后,Ku衛通天線按預定計劃執行對星程序,天線對準衛星后,Ku發射機打開,Ku鏈路開通。飛艇升空到20100米,留空近2小時,在此期間,通過衛星信息傳輸系統將紅外圖像和遙測數據高質量地傳送到地面指揮控制站,并完成了地面站對飛艇的飛行控制和艇上設備的參數設置。飛艇下降到7000米時,設備電源關閉。試驗過程中衛星信息傳輸系統工作穩定。

猜你喜歡
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
中華手工(2017年2期)2017-06-06 23:00:31
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年8期)2016-01-16 03:45:32
西部廣播電視(2015年3期)2016-01-15 02:05:45
西部廣播電視(2015年1期)2016-01-15 02:05:37
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
