基于回聲狀態網絡的船舶搖蕩連續預報方法研究
2016-11-15 14:26:03石博文張新宇劉正江
艦船科學技術 2016年6期
石博文,張新宇,劉正江
(1.大連海事大學 航海學院,遼寧 大連 116026;2.大連艦艇學院,遼寧 大連 116018)
基于回聲狀態網絡的船舶搖蕩連續預報方法研究
石博文1,張新宇2,劉正江1
(1.大連海事大學 航海學院,遼寧大連 116026;2.大連艦艇學院,遼寧大連 116018)
回聲狀態網絡(ESNS)是一種新型遞歸神經網絡,可通過對有限的已知樣本進行訓練,建立非線性模型來預報未知樣本。該算法在解決非線性問題時具有一定優勢。無需知道海浪的先驗信息和船舶航行姿態的狀態方程,僅利用實測的船舶橫搖、縱搖歷史數據,尋求規律即可進行實測搖蕩數據的極短期預報。仿真結果表明,該算法在預報 15 s 以內可達到較高的預報精度,通過預報窗口的平移,可以進行連續在線預報。
回聲狀態網絡;船舶搖蕩;連續預報
0 引 言
船舶搖蕩預報對于艦載機安全起降等有重要意義。根據艦載機安全起降對船舶橫搖、縱搖、垂蕩等要求,采用極短時間預報方法找出未來一段時間內符合著艦要求的時間窗口,使指揮官能夠在艦載機準備下滑或正在下滑時及時向飛行員通報船體搖蕩情況,可以為艦載機起降作業提供一定的輔助決策支持[1]。
目前在船舶搖蕩預報方面,國內研究單位主要有哈爾濱工程大學、大連艦艇學院和中船重工集團第702 研究所等單位[1]。哈爾濱工程大學采用的主要預報方法包括自回歸法[2]、最小二乘法[3]、首前波法、卡爾曼濾波法、周期圖法、投影尋蹤法及神經網絡方法[4]等,主要對船模實驗搖蕩數據進行預報。大連艦艇學院主要采用混沌時間序列分析方法進行預報[5]。702 研究所主要用 ARMA 模型和神經網絡模型進行預報。在已查閱的國內外相關資料之中,還未發現對實船測試數據的有效預報達到 15 s 的文獻和研究成果。
本文結合實測的船舶搖蕩數據,采用回聲狀態網絡方法進行連續極短期預報。
1 船舶搖蕩數據的采集與分析
1.1實驗設備介紹
為測量船舶的運動姿態,分別采用膜電位水平傳感器、運動姿態測量產品 VM-i 進行測量[6]。
膜電位傳感器通過串口將數據讀入計算機,由數據采集卡自動采集,輸出數據結構為:序號、橫搖、縱搖。VMESENS VM-i 數據輸出結構為:首搖,縱搖,橫搖,X 軸磁場強度,y 軸磁場強度,Z 軸磁場強度,X 軸陀螺儀輸出,Y 軸陀螺儀輸出,Z 軸陀螺儀輸出,X 軸加速度,Y 軸加速度,Z 軸加速度。
1.2實驗概況
采用膜電位傳感器和 VM-i 分別對某船和某實習訓練船的搖蕩情況進行測量,第 1 次測量時間從 2011 年6月12日-6月 17日,測量對象為某船,測量海域為黃海。第 2 次為某實習訓練船出國訪問時隨船測量,時間從 2011年8月 2日-8月12日,測量海域分別為海參崴到元山段以及元山到旅順段[7]。

圖1 測姿實驗現場Fig.1 Motion measurement equipment
2 回聲狀態網絡
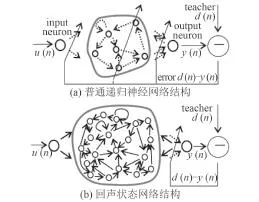
回聲狀態網絡(ESNs)是 2001 年由德國 Bremen大學的 Jaeger 教授提出的一種新型的神經網絡,是遞歸神經網絡的一種,其結構與生物神經網絡非常類似。2004年Jaeger 教授將該網絡用于麥克格拉斯混沌時間序列的預測,使其預測精度提高了 2 400 倍,得到了極大的關注。
相對普通的遞歸神經網絡,回聲狀態網絡主要有2 點不同:1)回聲狀態網絡的隱層規模非常大,需要大約 30~1 000 個神經元。這些大量神經元之間進行稀疏的連接,稱為“儲備池”。儲備池中的大量神經元可以將輸入信號映射到高維空間,因此回聲狀態網絡具有非常強的非線性處理能力。2)回聲狀態網絡的訓練過程只調整隱層到輸出層的連接權值,解決了訓練過程中權值之間耦合的問題,使得訓練過程大大簡化。
設回聲狀態網絡包含 p 個輸入單元:


i 個輸出單元:則儲備池神經元狀態按式(1)進行更新:

其中 x(n)=[x1(n),x2(n),···,xN(n)]T表示儲備池中神經元狀態向量在第 n 個時刻的值;,,為輸入連接權;內部連接權和輸出連接權,f=[f1,f2,···,fN]為內部神經元激活函數,N 為儲備池規模。
回聲狀態網絡的輸出方程為:

3 船舶搖蕩的連續預報方法
首先,要找到二者的映射關系。假定訓練數據data 的長度為 m,通過滑動窗口來建立一個訓練數據矩陣,每個窗口的寬度為,首先從第一個數據開始,建立過去 p 個時間點的采樣值與之間的映射關系,然后將訓練窗口依次后移,直到建立起{xm-p+1,xm-p+2,…,xm} 與預報的目標值{xm+1,xm+2,…,xm+i} 之間的映射關系,訓練結束后,就可以用得到的映射關系進行預報。
4 實測船舶搖蕩數據預報
4.1實測數據說明
在大量的實測數據中,僅選取 2 段數據進行仿真預報。第 1 段數據為某船 6月 14日第 27 個記錄周期的橫搖數據,根據實測數據可計算出三一值為 1.63°。第 2 段數據為某實習訓練船在海參崴到元山的航程中的一段縱搖數據,根據實測數據,可以計算出三一值為 0.7 °。
4.2實測數據預處理
為了避免輸入向量中各變量相差過大影響訓練效果,支持向量機的訓練數據樣本要進行歸一化處理。設和分別代表訓練樣本集合中歷史搖蕩幅度的最大和最小值,x 為實際搖蕩數據,為歸一化后的搖蕩值,則:

使訓練數據轉換到[0,1]間,可用式(4)重新換算回真實的搖蕩值:

通過歸一化處理,可以使船舶搖蕩數據能夠在有效數據空間均勻分布開。
4.3預報效果分析
預報效果如圖3 和圖4 所示。
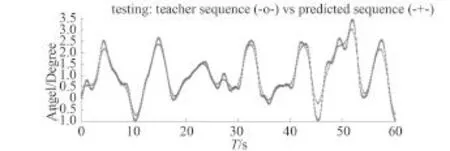
圖3 對某船橫搖數據連續預報結果Fig.3 Continuous roll forecasting of a target ship
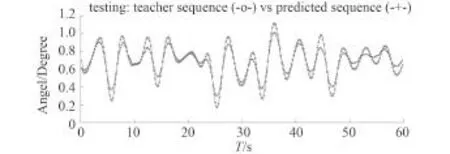
圖4 某訓練船縱搖數據連續預報結果Fig.4 Continuous pitch forecasting of a training ship
4.4評價指標
為了評價模型的預測性能,采用測量誤差相對三一值的誤差對預測效果進行評估:

為便于比較,本實驗均對某船的橫搖數據和某訓練船的縱搖數據均每次向前預報 15 s,連續預報 4次,即共預報 60 s。誤差隨預報長度變化如圖5 和圖6所示。
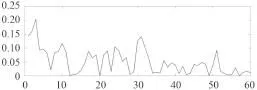
圖5 某船橫搖數據預報連續 15 秒時,相對三一橫搖值的誤差Fig.5 The relative error corresponding to significant roll data of a target ship while performing 15 seconds forecasting
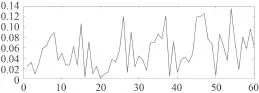
圖6 某訓練船縱搖數據連續 15 秒時,相對三一縱搖值的誤差Fig.6 The relative error corresponding to significant pitch data of a training ship while performing 15 seconds forecasting
5 結 語
結合回聲狀態網絡(ESNs)在非線性處理方面的優勢,建立了連續預報算法,該算法運算速度快,能滿足實時運算的要求,兼顧了訓練誤差風險和實時船舶搖蕩數據的變化,模型具有需要樣本少、泛化能力強的優點,適用于船舶搖蕩運動的在線預報。
從圖5 和圖6 可看出,連續預報 60 s 的平均相對誤差低于 20%,且多數時間內相對誤差低于 15%。可見,對于實船搖蕩時歷的預報,本文提出的回聲狀態網絡方法的有效預報時長約為 2 個搖蕩周期,基本能滿足實船極短期預報的需要。
[1]劉孫波,施平安,陳聚和.艦船波浪中運動時域預報方法研究[J].廣州航海學院學報,2014,22(2): 21-23.
[2]彭秀艷,趙希人,魏納新,等.大型艦船姿態運動極短期預報的一種AR算法[J].船舶工程,2001(5): 5-7,10.
[3]彭秀艷,劉長德.基于格型遞歸最小二乘算法的船舶運動極短期預報[J].船舶力學,2012,16(1/2): 44-51.
[4]王琳.基于CMAC神經網絡的艦船運動預報仿真研究[J].數學的實踐與認識,2014,44(23): 160-165.
[5]劉博,蔡烽,石愛國.艦船搖蕩預報中的雙變量局域線性多步預報法[J].中國航海,2012,35(2): 33-38.
[6]陳遠明,葉家瑋,張兮龍.船舶運動的極短期預報試驗[J].船海工程,2010,39(1): 13-15,20.
[7]侯建軍,常小勇,石愛國.艦船搖蕩運動數據采集及混沌特性分析[J].船舶工程,2011,33(6): 25-28,84.
[8]JAEGER H,HAAS H.Harnessing nonlinearity: predicting chaotic systems and saving energy in wireless communication[J].Science,2004,304(5667): 78-80.
[9]郭嘉.回聲狀態網絡分類方法及其應用研究[D].哈爾濱: 哈爾濱工業大學,2011.
Continuous forecasting of ship sway based on ESNs
SHI Bo-wen1,ZHANG Xin-yu2,LIU Zheng-jiang1
(1.Navigation College,Dalian Maritime University,Dalian 116026,China;2.Dalian Naval Academy,Dalian 116018,China)
Echo state networks (ESNs)is a new kind of recurrent neural networks,which is suitable for the data processing based on finite number of training samples to forecast the unknown data by a nolinear model.It has preponderance for solving the nonlinearity problems.Without prior information of sea waves and the state equations of ship motions,only using the real measured roll and pitch data,the ESNs method is applied to solve the problem of short time series forecasting.Results show that the method satisfies the need of online forecasting within 15 seconds,and continuous forecasting can be realized by sliding the window.
echo state networks;ship sway;continuous forecasting
TP183;TP301.6
A
1672-7619(2016)06-0067-03
10.3404/j.issn.1672-7619.2016.06.013
2016-03-04;
2016-04-20
石博文(1985-),男,博士研究生,研究方向為交通運輸規劃與管理。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
