澳門輕軌高架連續剛構橋節段預制拼裝施工及控制
2016-11-15 03:03:07祁向宇
中國港灣建設 2016年10期
祁向宇
(中國土木工程集團有限公司,北京 100038)
澳門輕軌高架連續剛構橋節段預制拼裝施工及控制
祁向宇
(中國土木工程集團有限公司,北京100038)
澳門輕軌1號線高架橋穿越凼仔島中心區域,路線十分復雜,跨徑類型繁多,上部結構采用短線匹配法預制和提梁機懸臂拼裝新型施工工藝。文章闡述了施工及控制的關鍵技術。實踐表明,節段預制拉裝技術在城市高架曲線橋梁中適應性良好,對既有交通干擾少,施工效率高。
輕軌高架;連續剛構;節段預制拼裝;提梁吊機;施工控制
1 概述
穿越凼仔島市中心的澳門輕軌1號線高架為多跨節段預制拼裝連續剛構橋,一聯通常由4~6跨組成,跨徑20.0~45.0m不等,主梁斷面為單箱單室(圖1)。上部結構分為預制節段、濕接縫以及墩頂現澆段,其中預制節段共計652榀,節段長度一般為2.5 m,吊重不超過40 t。
預制節段在珠海梁場采用短線匹配法制造,后海運至拼裝現場,通過濕接縫與已現場澆筑完成的墩頂段形成整體,預制節段則由提梁機對稱懸臂拼裝,節段間由環氧樹脂連接。與國內外類似工程相比[1-7],本項目高架橋節段預制拼裝存在以下難點。
1)路線復雜,曲線半徑小:線路所經區域建筑物密集,道路彎曲狹窄,受地形限制,最小曲線半徑R=47m,遠小于國內規范規定。過小的曲線半徑疊加橋梁縱坡給節段梁匹配預制帶來難度,需不斷調整模板以適應每榀梁段尺寸差異。
2)跨徑小且采用提梁機拼裝工藝:由于本項目曲線較多,國內常用的架橋機整跨拼裝適應性差,需采用提梁機進行懸臂拼裝。為適應該拼裝工藝需進行必要調整,如懸拼過程中為避免底板開裂采用分批張拉懸臂鋼束而不是一次張拉到位;為解決合龍口永久預應力張拉空間不夠的問題,在T構最后一對懸拼梁采用臨時預應力與已成梁段連接而不布置體內懸臂束等;為使墩頂現澆段與1號懸臂節段匹配良好,兩節段間設置濕接縫,1號節段需在支架上方精確定位。拼裝過程中,需嚴格遵循工序并控制初次鋼束張拉,提高首節段1號定位精度,實時監測拼裝線形以確保在無需壓重等調整措施下實現精準合龍。
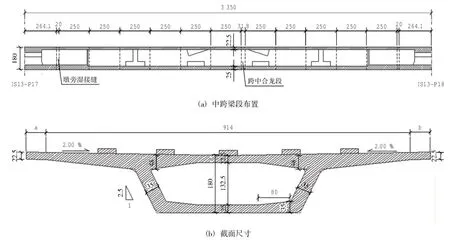
圖1 節段總體布置及截面尺寸(單位:cm)Fig.1 Layoutof segmentand itssectionaldimension(cm)
2 小曲率半徑高架橋短線匹配法預制
采用短線法進行節段預制,首先需要將橋梁劃分為若干合理的節段,每跨起始預制節段采用一端固定端模、一端活動端模進行澆筑;其他梁段以已經預制完成的節段作為其相鄰節段的匹配節段,完成混凝土的澆筑,如此循環完成所有預制單元的施工。澳門輕軌小曲率半徑段高架橋節段梁為空間扭曲箱梁,如何在預制臺座上重現相鄰梁段間相對的空間幾何姿態,是梁段預制過程中亟待解決的關鍵問題。
2.1小曲率半徑節段匹配預制
曲線節段預制時,根據擬合的各線段間夾角,將節段從澆筑位置移動到匹配位置上,在相應水平面內轉動角度α,以形成需要的折角(圖2(a))。新澆節段的端模位置不動并使其與節段軸線垂直,而新澆節段的匹配端面采用斜面,以便于鋼筋骨架制作、剪力鍵設置和節段外形調整。對于本項目,每跨T構的首榀節段梁(1號塊)均預制為直角梯形,其后所有匹配節段也可近似為直角梯形,梁面上6個測點如圖2所示。在首節段預制時,梁面測點處于同一水平面,當該T構后續梁段處于橋梁縱坡時,由于圓弧外側梁長較內側大,安裝時2號塊6點高程必將比5點高程大,因而在匹配預制該節段時需將匹配梁(即1號節段)進行扭曲,同樣后續梁段預制時也需將匹配梁進行扭曲調整。
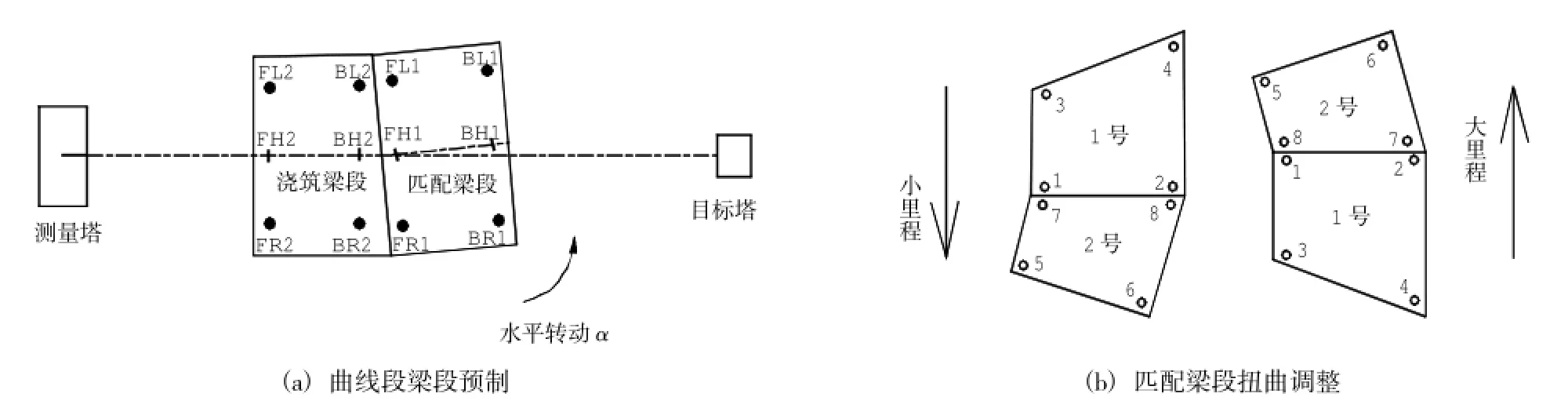
圖2 小半徑曲線梁段匹配預制示意圖Fig.2 M atching p recast of sm all radius cu rve beam section
2.2預制線型控制
在預制過程中,依據幾何控制理念制定小曲率半徑段梁段預制控制方案及相應的誤差調整方法。在梁段預制開始前,先按照設計圖紙及施工方案進行結構計算分析,確定制作預拱度和梁段尺寸;根據箱梁中心線,建立幾何數據庫。在預制過程中,通過已澆筑梁段控制點的實測坐標,經過專用軟件系統計算出節段梁控制點在匹配位置處的空間坐標。
項目實施時,為滿足合同工期要求,預制梁廠共配制10套模板,節段梁的生產速度達到3~4榀/d。
3 提梁機懸臂拼裝
3.1總體拼裝工藝流程
提梁機懸臂拼裝即以1個橋墩為中心,對稱拼裝節段,該工藝通常用于大跨徑橋梁或曲線橋梁。對于澳門輕軌高架橋,邊墩T構節段梁及中墩墩旁1號塊均由汽車吊吊至支架上方進行安裝,中墩T構其余節段則由專用提梁機進行拼裝。典型拼裝工藝流程為:
1)邊跨在支架上方拼裝,后安裝中間墩墩旁支架,開始懸臂拼裝。
2)第2跨,由起重機起吊安裝首階段,并澆筑墩頂節段旁濕接縫,張拉預應力鋼索。
3)第2跨,安裝提梁機,開始懸臂拼裝預制節段先后張拉臨時預應力、永久預應力。
4)安裝合龍段支撐,澆筑濕接縫,張拉永久預應力,重復以上步驟,直至全聯施工完畢。
3.2懸臂吊機及標準節段拼裝
1)節段梁提梁機
為適應小曲率半徑節段梁懸臂拼裝,專門研制節段梁提梁機。提梁機由主框架、縱橫移機構、滑輪及吊具組件、錨固系統以及液壓系統組成。提梁機自重24 t,最大起重量為48 t。提梁機具備梁段調位功能,可通過起重小車上的橫向水平千斤頂微調節段梁的橫向位置,通過吊具上的千斤頂調整節段梁的縱橫向傾角。
2)標準節段拼裝
節段梁懸拼作業是在墩頂0號塊現澆后并與左右1號塊進行濕接,使墩梁固結,組成墩頂平臺,在平臺上安裝提梁機,向左右橋跨內逐塊對稱懸臂拼裝。待0號塊與兩1號塊濕接、張拉完成后,在墩上拼裝2臺提梁機,2臺提梁機機尾相聯一體,互為平衡,起吊2號塊時兩端必須同時起吊,待2號塊節段梁拼裝完成后,解開提梁機機尾,各自向前縱移到位,自行錨固,完成其他梁段懸拼作業。標準節段拼裝工藝流程為:節段起吊運輸至拼裝位置→節段試拼→移開節段塊件,在拼接面涂刷環氧樹脂→節段拼接靠攏,正式定位,張拉臨時預應力筋→相對節段安裝完成,張拉永久鋼束→懸拼吊架吊點松鉤。
3.3起始節段及邊跨梁段拼裝
起始節段及邊跨節段梁架設均采用支架進行施工,節段梁節段采用汽車吊進行吊裝。支架基礎采用鋼管樁,鋼管樁頂設分配梁,分配梁上布置墊塊及千斤頂,以調整節段標高及平面位置。在拼裝時,為了消除支架的構造變形,支架在施工完畢后先進行預壓,預壓荷載包括支架上全部載荷總重的1.3倍,預壓時間不少于3 d。
3.4節段梁合龍
連續剛構合龍段為20~50 cm的濕接縫,在合龍段澆筑前應調整兩端中線標高,完成勁性骨架的焊接,合龍順序為逐跨合龍。合龍段混凝土施工是連續結構施工的關鍵工序,為避免因溫度、早期收縮徐變等因素使新澆筑混凝土受拉、設計采用剛度較大的工字鋼作為合龍段勁性骨架,混凝土采用微膨脹混凝土。
3.5懸臂拼裝線形控制
預制節段的懸拼線型主要依靠節段預制質量來控制,拼裝期還需嚴格控制1號塊定位精度,同時對懸拼階段進行實施監控,以滿足施工期安裝精度及成橋線形設計要求。
1)首節段的安裝定位
由于首節段決定后續節段的趨勢,故需借助全站儀精確控制軸線及高程,且對箱梁進行偏差測算并反饋給班組直至精確就位。考慮到首節段在臨時支架上方進行定位,必須對支架進行預壓,消除殘余變形,掌握彈性變形的規律,以供確定該梁段安裝理論值。首節段安裝允許誤差如表1。2)懸臂拼裝階段的安裝目標數據及實時監控將預制節段控制點在預制局部坐標系下的坐標輸入至控制軟件系統,系統會自動將該坐標轉化到節段安裝整體坐標系下的坐標,生成節段安裝指令,指導節段安裝。拼裝控制測點與其在預制時所用的幾何控制測點相同,如圖3所示。
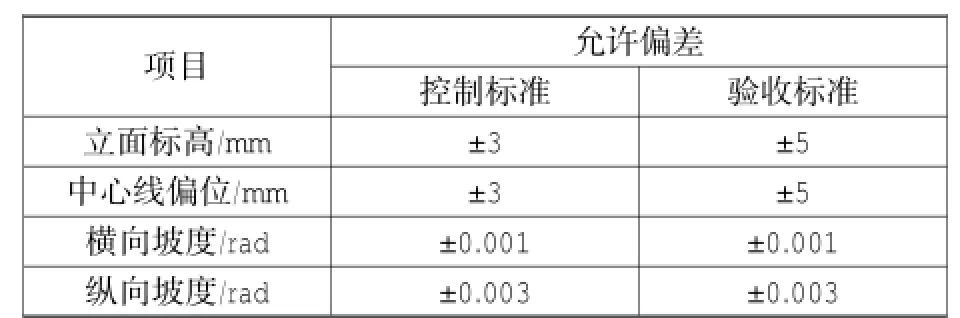
表1 基準塊安裝允許誤差Table1 Perm issibleerror for installing the referenceblock
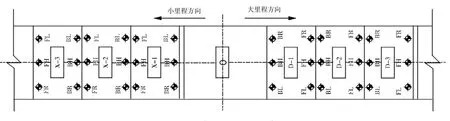
圖3 安裝階段線形控制測點Fig.3 Linear controlstation in the installation phase
在安裝過程,將安裝實測數據輸入至控制系統,系統自動識別,若誤差超過規定允許值,系統將提出節段安裝調整方案,保證節段安裝線形滿足設計要求。由于最后一對懸拼梁采用臨時預應力與已成梁段連接,拼裝線形調整措施僅限于墊片調整而不能采用壓重等常見措施。
3)懸拼線形控制效果
為了驗證線形控制效果,以第四聯為例,將成橋之后采集的數據與設計理論線形進行對比,軸線及高程誤差均控制在±20mm內,如圖4。
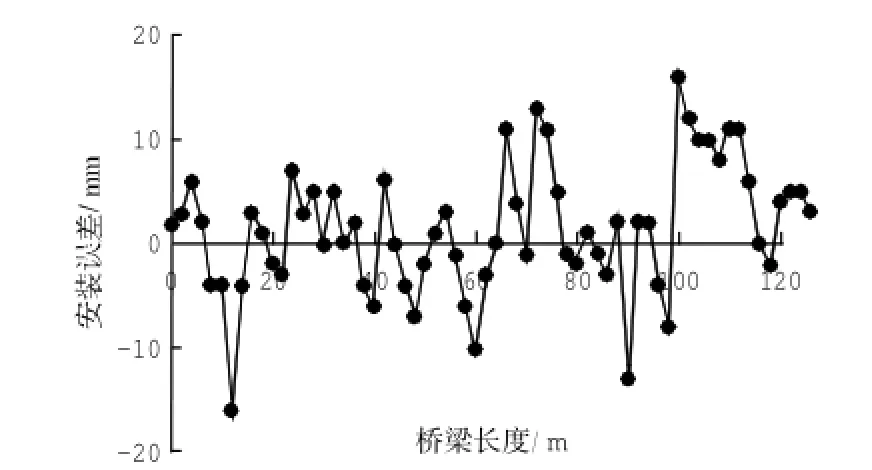
圖4 懸臂拼裝線形控制高程誤差Fig.4 Linear controlelevation error of cantilevered assembly
4 結語
針對短線匹配預制、提梁機懸臂拼裝工藝在澳門輕軌高架橋的應用難題,通過優化結構構造、工藝流程以及研發專用裝備等,形成了小曲率半徑連續剛構橋節段預制拼裝關鍵技術,可為今后城市擁擠地段軌道交通高架橋提供可借鑒的施工經驗。實踐表明,節段預制拼裝技術在城市高架曲線橋梁中適應性良好,且具有對既有交通干擾少,施工效率高等優點,可以預見,節段預制拼裝結構在城市橋梁建設中的應用將越來越多。
[1]張鴻,張喜剛,丁峰,等.短線匹配法節段預制拼裝橋梁新技術研究[J].公路,2011(2):76-82. ZHANGHong,ZHANGXi-gang,DINGFeng,etal.New technique of bridge precast segment assembling by short line method[J]. Highway,2011(2):76-82.
[2]海占忠.廣州市軌道交通4號線連續梁橋預制節段懸臂拼裝施工技術[J].鐵道標準設計,2009(3):40-45. HAI Zhan-zhong.Technology for construction of prefabricated segment with cantilevered assembling method in construction of continuous beam bridge in Guangzhou mass transit No.4 line[J]. Railway Standard Design,2009(3):40-45.
[3]王敏,張永濤,劉景紅,等.基于幾何控制法的短線預制拼裝箱梁研究[J].中國工程科學,2009(11):79-81. WANGMin,ZHANGYong-tao,LIU Jing-hong,etal.The research on method of geometry-control during erection of the short-line bridge[J].Engineering Science,2009(11):79-81.
[4]劉亞東,劉景紅,戴書學,等.蘇通大橋75m跨連續箱梁節段預制高精度控制技術[J].中國港灣建設,2005(4):50-54. LIU Ya-dong,LIU Jing-hong,DAIShu-xue,et al.Technology to controlprecision ofprecastingofsegmentsof75m long continuous boxgirders for Suzhou-Nantong Bridge[J].China Harbour Engineering,2005(4):50-54.
[5] 方蕾.短線預制懸臂拼裝連續梁橋施工線形控制研究[D].成都:西南交通大學,2008. FANG Lei.Line shape control of continuous girder bridge construction by short line precast cantilever erection[D].Chengdu: Southwest Jiaotong University,2008.
[6]劉先鵬,劉亞東,戴書學,等.箱梁節段短線匹配法預制施工技術[J].重慶建筑大學學報,2006(5):59-62. LIU Xian-peng,LIU Ya-dong,DAIShu-xue,et al.Short-line match casting technique for precast segmental construction[J]. Journalof Chongqing Jianzhu University,2006(5):59-62.
[7]王淵.城市高架軌道交通節段拼裝橋梁施工及控制技術研究[D].長沙:中南大學,2008. WANG Yuan.Study on segmental assembly bridge construction and control technology in urban viaduct rail transit[D].Changsha: CentralSouth University,2008.
Construction and control of segmental precast assembly for continuous rigid frame viaduct in M acao LRT
QIXiang-yu
(China Civil Engineering Construction Corporation,Beijing100038,China)
The viaductofMacao LRT line 1 passes through the central region of TAIPA,the route is very complicated and the span type is various.Itsupper structure adoptnew construction techniques of short-linematching prefabrication and cantilever erection by erection crane.We introduced the key technology of construction and control.The practice has proved that the segmental precast assembly technology has good applicability in the urban viaduct curved bridge,less disturbance to the existing traffic,and high construction efficiency.
light rail viaduct;continuous rigid frame;segmental precast assembly;erection crane;control technology
U448.28;U445.4
B
2095-7874(2016)10-0069-04
10.7640/zggw js201610016
2016-04-12
祁向宇(1984— ),男,遼寧朝陽人,工程師,主要從事工程施工及技術管理工作。E-mail:qixiangyu@ccecc.com.cn
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20