基于改進的QP算法和MPC理論的智能車縱向速度控制方法
2016-11-16 05:22:44周晶晶徐友春李明喜
軍事交通學院學報 2016年10期
周晶晶,徐友春,李明喜
(1.軍事交通學院 研究生管理大隊,天津 300161; 2.蚌埠汽車士官學校 運輸勤務系,安徽 蚌埠 233011;3.軍事交通學院 軍用車輛系,天津 300161)
?
● 車輛工程Vehicle Engineering
基于改進的QP算法和MPC理論的智能車縱向速度控制方法
周晶晶1,2,徐友春3,李明喜3
(1.軍事交通學院 研究生管理大隊,天津 300161; 2.蚌埠汽車士官學校 運輸勤務系,安徽 蚌埠 233011;3.軍事交通學院 軍用車輛系,天津 300161)
基于模型預測控制(MPC)理論的智能車縱向速度控制問題可以轉換為二次規劃問題。針對該二次規劃(QP)問題,利用一種改進的有效集(IASM)二次規劃算法減少MPC計算成本。該方法包含兩步:首先對等式約束引進一種降維算法;然后利用梯度投影方向對有效集算法的搜索方向進行改進。改進的QP算法減少了迭代次數,降低了MPC縱向控制的計算成本。仿真結果證明了該方法的有效性。
二次規劃;改進的有效集算法;模型預測控制;縱向速度控制;智能車
模型預測控制(model predictive control,MPC)是20世紀80年代初發展起來的一類新型控制算法。MPC直接運用于工業過程控制的實際應用,并在與工業應用的緊密結合中不斷地完善和成熟[1]。文獻[2-4]將MPC運用于智能車的橫向或縱向控制,均取得了一定的效果。但目前面臨的主要問題之一是在優化目標較多時計算成本較高,影響智能車控制系統實時性的要求。本文討論MPC轉化為二次規劃(quadratic programming,QP)問題后,通過改進QP算法來降低計算成本,提高MPC的實時性。
QP問題的求解方法很多,可以采用內點法[5]、并行二次規劃法[6]、有效集法(active set method,ASM)或者原始對偶法[7]等求解。其中等式約束凸二次規劃一般采用零空間法[8-9]和拉格朗日法[7];一般凸二次規劃常用方法是有效集法和內點法。本文首先將基于MPC理論的智能車縱向速度控制問題轉化為QP問題;而后針對該問題,利用一種改進的有效集二次規劃算法減少迭代次數、改進搜索方向以減少計算量;最后用Matlab進行仿真驗證。
1 MPC縱向速度控制問題轉化為QP問題
車間運動學模型是一種簡單描述兩輛同向行駛的車輛之間位置變化關系的數學模型[3](如圖1所示)。建立xoy坐標系,被控車輛位置為xh,其速度、加速度為vh、ah;目標車輛位置為xd,其速度、加速度為vd、ad;兩車間相對距離、相對速度和相對加速度為xr、vr和ar;期望車間距和實際車間距分別為Δxdes、Δx,δ為二者間距誤差。
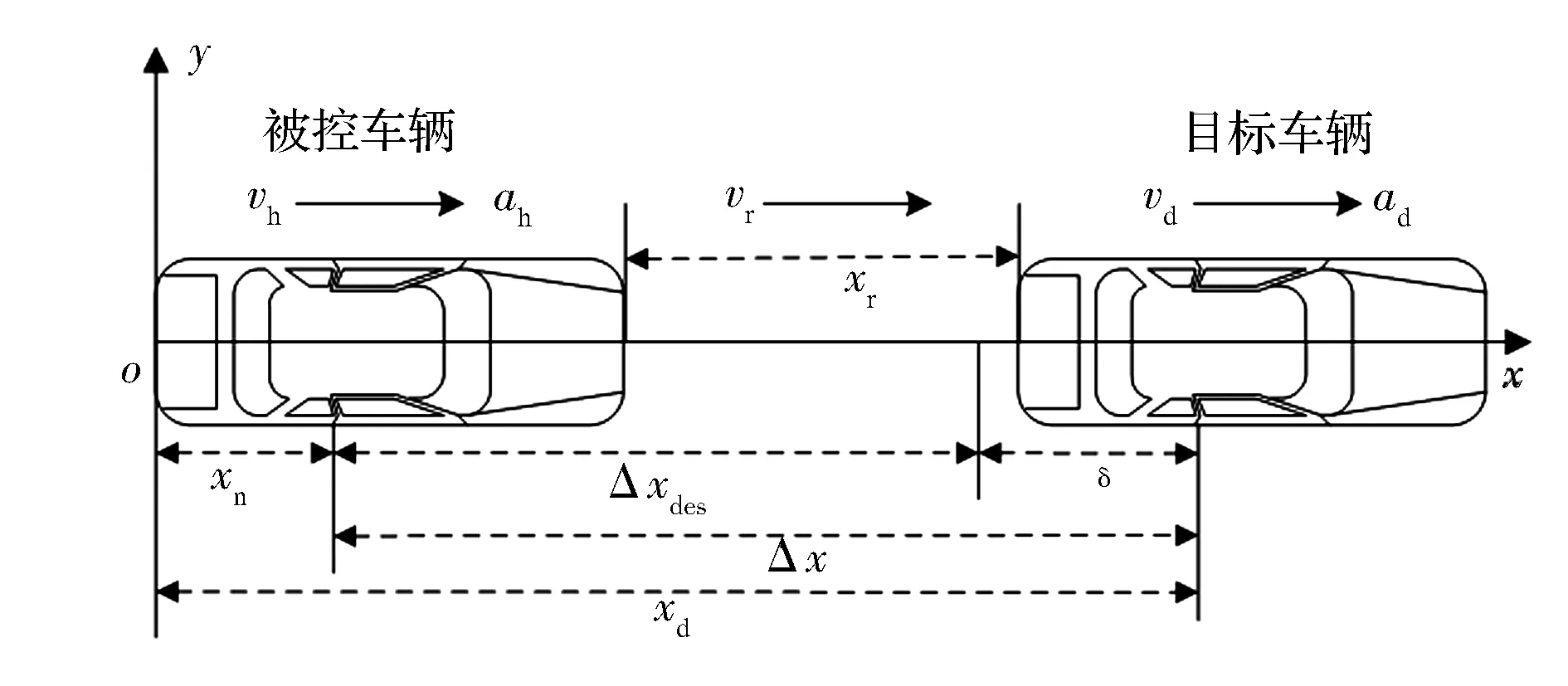
圖1 車間運動學模型示意
在李明喜等[3]、羅莉華等[4]車間運動學模型的基礎上,建立如下模型。其中兩車間相對距離xr、相對車速vr可由安裝在智能車前方的雷達測得,被控車輛的速度vh、加速度ah可由車載慣導測得。設采樣時間為Ts,執行器慣性環節時間常數為τ,期望加速度指令(控制輸入)為u,車輛的加加速度(加速度的導數)為j,反應Δxdes的時間常數為χ。為了保證安全,采用魯棒MPC的思想,把前面車輛的加速度視為有界干擾,并對車間運動學模型進行離散化。在初始時刻(t=0)條件下,車間運動學方程為
(1)
將目標車輛加速度ad(k)視為控制系統的擾動w(k),控制變量向量u(k)=[ah(k)],狀態變量向量x(k)=[Δx(k),vr(k),vh(k),ah(k),jh(k)]T表示相對距離、相對速度、本車速度、本車加速度、本車加加速度;y(k)=[δ(k),vh(k),ah(k),jh(k)]T為輸出變量向量,表示車間距誤差、本車速度、本車加速度、本車加加速度。車間縱向運動學模型為

(2)
式中:x為5維狀態向量;u為控制輸入向量;w為系統擾動輸入向量;y為輸出向量;A、B、C、D分別為狀態矩陣、控制輸入矩陣、狀態輸出矩陣及擾動矩陣,各系數矩陣如下:
同時為保證縱向控制的平穩性和舒適性,在設定y(k)的參考軌跡時,取平穩趨近于y(k)期望值的指數衰減函數作為參考,其函數為

式中:τδ、τv、τa、τj分別為相應參考軌跡的時間常數;E=diag[Eδ,Ev,Ea,Ej],且均在(0,1)區間,則參考軌跡向量為
yref=(k+i)=Eiy(k),i=1,2,…Np
搭建好縱向控制的預測模型之后,智能車縱向控制的目標函數J可以構建為
(3)
式中:ε為松弛因子;ρ為松弛因子權重系數;Q為輸出變量權重矩陣;R為控制變量權重矩陣;Np、Nc分別為MPC的預測時域和控制時域。
此外,為保證智能車縱向控制的安全性(d0為最小安全距離)、平穩性和舒適性,狀態變量及輸出變量需要滿足如下約束條件:
因此,可將基于車間運動學和MPC理論的智能車縱向速度控制問題轉化為式(4)帶有等式、不等式約束的QP問題:
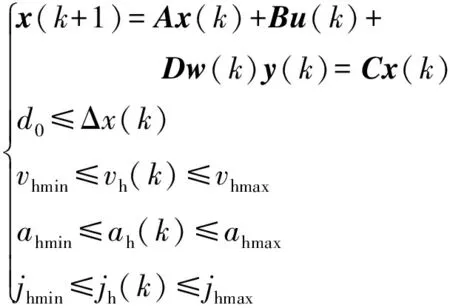
(4)
2 QP問題求解優化
考慮一般的QP問題表達式為
(5)
式中:H為n×n階對稱方陣(Hessian矩陣);c為常數向量。
有效集法求解QP問題的基本原理為:從一個初始點x0開始計算,用拉格朗日乘子法求解等式約束子問題得到全局極小點和對應的拉格朗日乘子dk、λk。若dk=0且等式約束子QP問題是原QP問題的可行解,則判斷λk的正負:若λk非負,則該解是全局極小點,停止迭代;若λk為負,則去掉一個約束重新求解等式約束子問題。若dk不為零,重新確定搜索方向和步長因子,調整有效集。若等式約束子QP問題不是原QP問題的可行解,那么需要增加約束繼續迭代求解所得的QP問題。
2.1等式約束QP求解的改進
首先考慮式(6)的等式約束QP問題(ECQP)的改進方法。為解決此問題,采用文獻[11]中的降維算法(dimension reduction algorithm,DRA)。
(6)
設H、A矩陣及x、b、c向量為
x=[x1x2…xn]T
b=[b1b2…bn]T
c=[c1c2…cn]T
設A行滿秩,即r(A)=m,A中一個非奇異子矩陣為M,且A=M+N,M、N分別為
其中,{i1,…,im}∪{j1,…,jp}={1,2,…,n},
m+p=n。J對x求梯度:
▽J(x)=Hx+c=P(x)+Q(x)
(7)
式中P(x)、Q(x)分別為
令N*=M-1N,增廣矩陣(A,b)經初等行變換變為(A*,b*),則式(6)的ECQP問題轉換為
(8)
相應地滿足Kuhn-Tucker條件的拉格朗日乘子為λ=-(M-1)T(Hmx+cm)。ECQP問題降維算法流程如圖2所示。可以發現,DRA算法和拉格朗日乘子法求解ECQP問題都是通過求解方程組得到最優解,但DRA算法中方程組個數為n個,而拉格朗日乘子法方程組個數為m+n個,DRA算法維數降低,減少了存儲空間和計算成本。
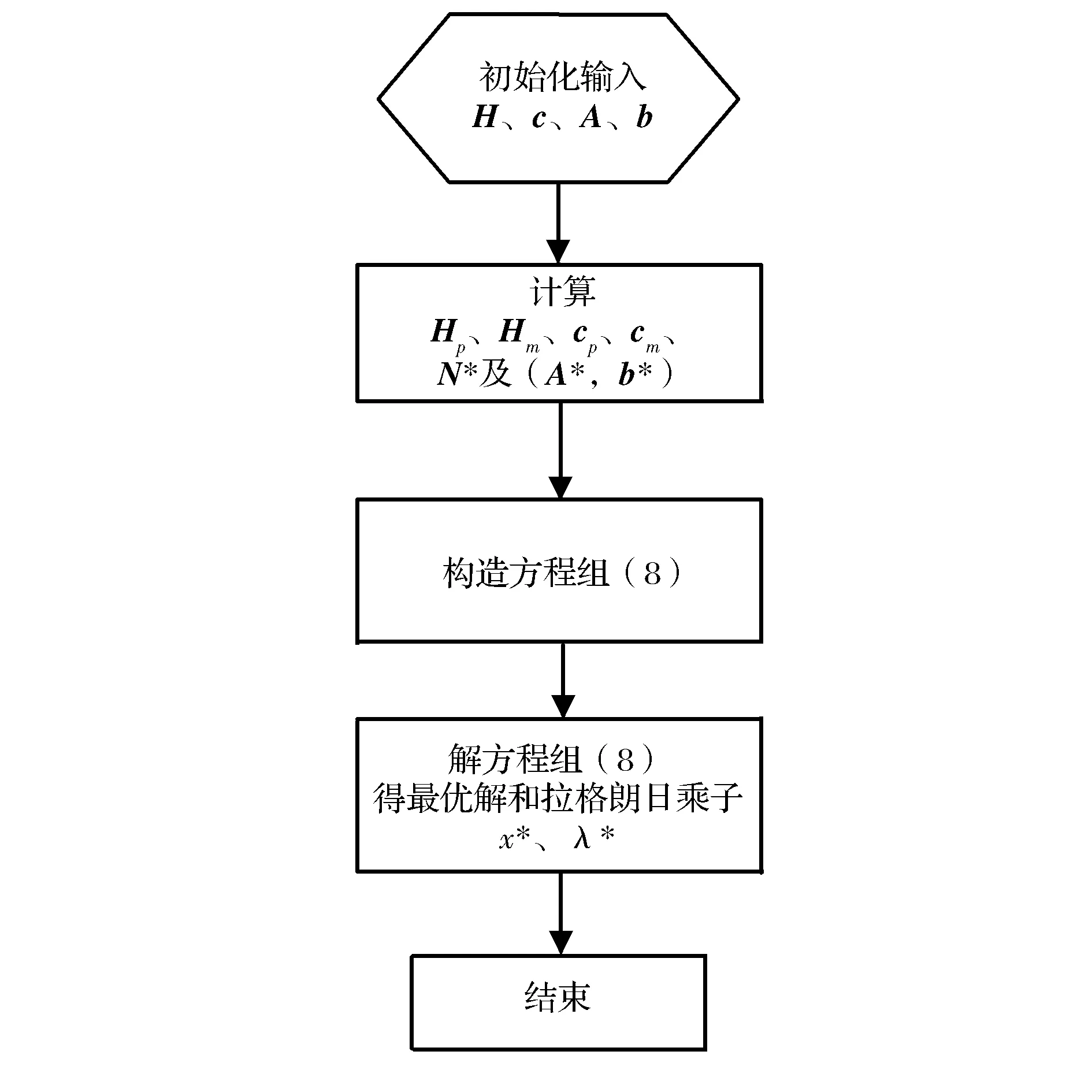
圖2 ECQP問題DRA算法流程
2.2改進的QP問題求解算法
式(5)的一般QP問題中,定義如下集合:I(x)={i∈I|aiTx=b},S(x)=E∪I(x)為有效集。文獻[10]已經證明:若H矩陣是半正定的,則式(5)是一個凸二次規劃;如果有至少一個向量滿足約束并且在可行域有下界,則凸二次規劃問題就有一個全局最小值;如果H是正定的,則式(5)為嚴格的凸二次規劃,那么全局最小值是唯一的。從圖2可以看出,當ECQP的最優解不是式(5)QP問題的可行解時,xk+1=xk+αkdk中雖然保證沿下降方向搜索,但不能確定是最速下降方向。為了提高QP算法的收斂速度,采用文獻[12]中的梯度投影算法(gradient-projection algorithm,GPA),用GPA算法解決最速搜索方向問題。為改進搜索方向,設xk是式(5)QP問題的可行解,有效集為S(xk)=E∪I(xk)。

(9)

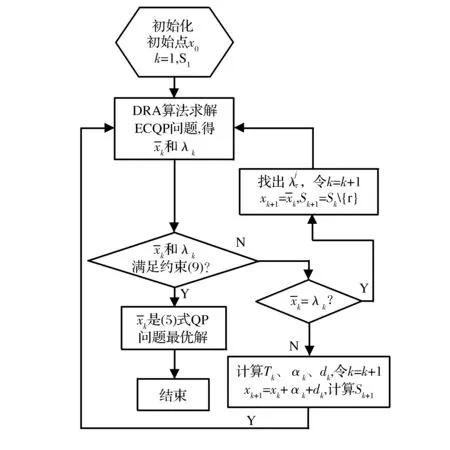
圖3 IASM算法流程
3 IASM數值和Matlab仿真實驗
3.1IASM算法數值實驗
利用Matlab實現上述IASM算法,并與Matlab優化工具箱中的QUADPROG算法(以下簡稱QP算法)及文獻[7]中的希爾德雷思二次規劃(hildreth quadratic programming,HQP) 算法比較,將IASM算法與QP、HQP算法在迭代次數、計算時間(10次取平均值,單位ms)進行對比。IASM算法使用Matlab(R2010a)編寫。采用文獻[13]中的典型測算例進行對比測試,P為算例編號、n為優化變量數、x0為初始點,對比結果見表1,其中A1為HQP算法、A2為QP算法、A3為IASM算法。
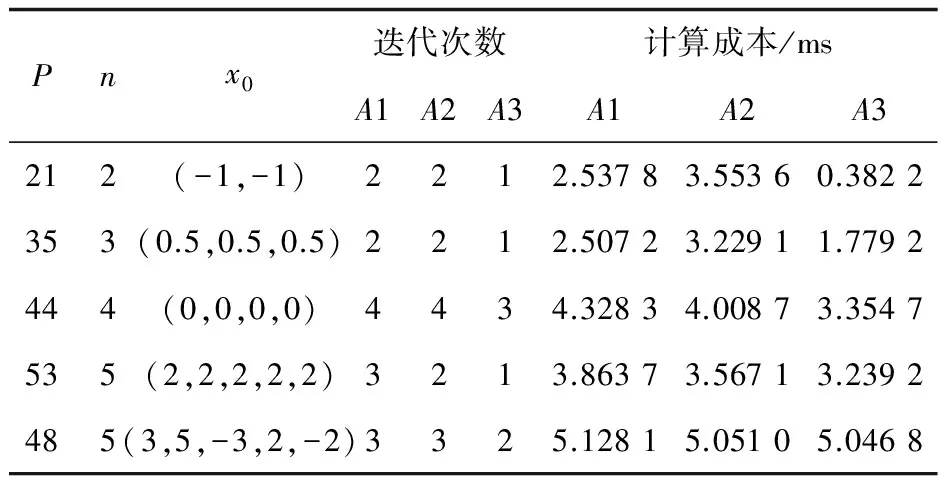
表1 IASM算法與QP、HQP算法算例對比
3.2縱向速度控制Matlab仿真
運用上述算法,解決式(4)的基于車間運動學的和MPC理論的智能車縱向速度控制問題。仿真參數值為:Np=15,Nc=5,Ts=0.01 s,Nsim=400,χ=1.2 s,τ=τδ=τv=τa=τj=0.5 s,d0=Δx=5 m,xh0=5 m/s。輸出變量權重系數和控制變量權重系數分別為0.6和0.8;約束條件為vhmin=0 m/s,vhmax=5 m/s,ahmin=0m/ s2,ahmax= 4 m/s2,jhmax= 0 m/s3,ahmax= 0.8 m/s3,改變預測時域Np,3種算法的MPC計算成本(單位ms)對比見表2。
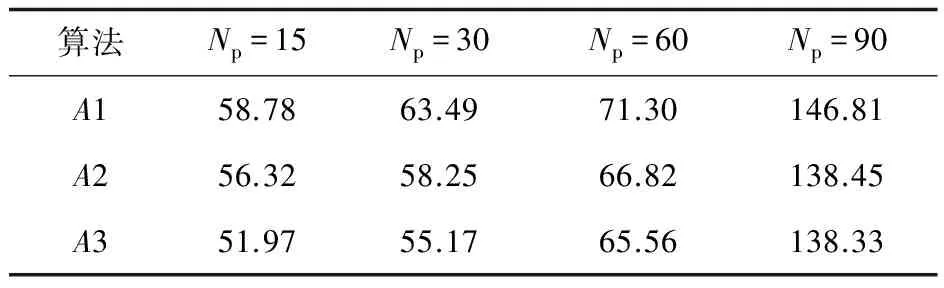
表2 MPC計算成本對比 ms
通過表1可以看出,在優化變量數n較少(n≤4)時,IASM算法迭代次數較少,計算成本比QP及HQP算法更低;當優化變量數n增加到一定程度(n≥5)時,IASM算法計算成本優勢不明顯,原因是在求解最速搜索方向時需要計算梯度投影。仿真結果表明算法是有效的。表2表明,在相同初始條件和預測時域下,IASM算法計算有一定優勢。Np≤60時,計算成本小于智能車實時控制周期100 ms,滿足控制實時性要求。
[1]李國勇.智能預測控制及其MATLAB實現[M].2版.北京:電子工業出版社,2010:255-268.
[2]FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. Control Systems Technology, IEEE Transactions, 2007, 15(3): 566-580.
[3]李明喜,章永進,彭永勝,等.車間運動學模型在智能車速度跟蹤控制中的應用[J].軍事交通學院學報.2015,17(11):49-53.
[4]LUO Lihua, LIU Hong, LI Ping, et al. Model predictive control for adaptive cruise control with multi-objectives: comfort, fuel-economy, safety and ca-following[J]. Journal of Zhejiang University SCIENCE A, 2010,11(3):191-201.
[5]KUHNE F, LAGES W F. Model predictive control of a mobile robot using linearization[J]. Proceedings of Mechatronics and Robotics, 2004:525-530.
[6]BRAND M, SHILPIEKANDULA V, YAO C, et al. A parallel quadratic programming algorithm for model predictive control[C]//Proc. 18th World Congress of the International Federation of Automatic Control, 2011,18(1): 1031-1039.
[7]WANG Liuping. Model Predictive Control System Design and Implementation Using MATLAB[M]. London: Springer, 2009:60-73.
[8]盧桂馥,王勇,鄒健.一種快速的零空間算法[J].西安交通大學學報,2012,46(2):59-63.
[9]桂湘云,劉樹成.一般二次規劃問題的交換型零空間方法[J].應用數學學報,1988,11(2):209-221.
[10]馬昌鳳.最優化方法及其Matlab程序設計[M].北京:科學出版社,2010:190-211.
[11]易穎華.二次規劃的改進有效集算法[D].南昌:江西師范大學,2008:8-13.
[12]崔睿贇.求解凸二次規劃的自適應投影梯度算法[D].南京:南京大學,2009:14-20.
[13]HOCK W, SCHITTKOWSKI K. Test Examples for Nonlinear Programming Codes[A]. Lecture Notes in Economics and Mathematical Systems.Berlin: Springer-Verlay, 1981, Vol. 187:44-76.
(編輯:張峰)
Longitudinal Speed Control Method of Intelligent Vehicle Based on Improved QP Algorithm and MPC Theory
ZHOU Jingjing1,2, XU Youchun3, LI Mingxi3
(1.Postgraduate Training Brigade, Military Transportation University, Tianjin 300161, China;2.Transportation Service Department, Bengbu Automobile NCO Academy, Bengbu 233011, China;3.Military Vehicle Department, Military Transportation University, Tianjin 300161, China)
The problem of longitudinal speed control of intelligent vehicle based on MPC (model predictive control) theory can be converted to QP (quadratic programming) problem. Considering this QP problem, the paper proposes a method which can reduce MPC costs with IASM(improved active set method). Firstly, it introduces a dimension reduction algorithm for equality constraints. Then, it improves the search direction of active set algorithm with gradient-projection direction. The improved QP algorithm reduces the number of iterations and the computational cost of MPC longitudinal control. The simulation result verified the effectiveness of the method.
QP; IASM; MPC longitudinal speed control; intelligent vehicle
2016-06-02;
2016-08-23.
國家自然科學基金項目(91120306;91220301).
周晶晶(1986—),男,碩士研究生;
徐友春(1972—),男,博士,教授,博士研究生導師.
10.16807/j.cnki.12-1372/e.2016.10.012
TP273
A
1674-2192(2016)10- 0049- 05
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16