基于時(shí)間參數(shù)表的RSM圖繪制方法
2016-11-17 01:59:02蔣紅妍王鑫業(yè)
土木工程與管理學(xué)報(bào) 2016年4期
蔣紅妍, 王鑫業(yè), 徐 銳
基于時(shí)間參數(shù)表的RSM圖繪制方法
蔣紅妍, 王鑫業(yè), 徐 銳
(西安建筑科技大學(xué) 土木工程學(xué)院,陜西 西安 710055)
RSM圖是開(kāi)展重復(fù)性建設(shè)項(xiàng)目進(jìn)度控制與優(yōu)化的基礎(chǔ),但現(xiàn)有繪制方法還不夠理想。確定各工序系的最佳執(zhí)行模式,不僅可得到各工序最佳施工持續(xù)時(shí)間,還可保證RSM圖與實(shí)際施工的一致性;建立各工序系的時(shí)間參數(shù)表,包含施工持續(xù)時(shí)間、開(kāi)始和完成時(shí)間、停工時(shí)間等,只需簡(jiǎn)單的表上計(jì)算,將各工序系初始生產(chǎn)線(xiàn)向右“平移”即可得到其最終生產(chǎn)線(xiàn),從而快捷、準(zhǔn)確地繪出滿(mǎn)足工序系邏輯及搭接關(guān)系、資源限制條件的RSM圖;定義各工序系的控制數(shù)組,結(jié)合時(shí)間參數(shù)表,通過(guò)簡(jiǎn)單的表上操作,可確定RSM圖上的控制序列并區(qū)分工序種類(lèi),為重復(fù)性建設(shè)項(xiàng)目管理提供了充分信息。通過(guò)一個(gè)案例詳細(xì)說(shuō)明了基于時(shí)間參數(shù)表繪制RSM圖的具體步驟。
RSM圖; 時(shí)間參數(shù)表; 控制數(shù)組; 控制序列
重復(fù)性建設(shè)項(xiàng)目是指建設(shè)過(guò)程中各個(gè)工序在若干相同或相近的作業(yè)單元上不斷重復(fù)進(jìn)行的一類(lèi)項(xiàng)目,常見(jiàn)于高速公路、管道工程、高層建筑等建設(shè)項(xiàng)目。制定進(jìn)度計(jì)劃時(shí)廣泛應(yīng)用的關(guān)鍵路徑法(Critical Path Method,CPM)適用于一般建設(shè)項(xiàng)目,用于重復(fù)性建設(shè)項(xiàng)目則存在諸如表達(dá)不夠簡(jiǎn)潔[1,2]、無(wú)法保證資源連續(xù)性[3]、無(wú)法準(zhǔn)確反映工程實(shí)際進(jìn)展?fàn)顩r[4]等許多缺陷。從20世紀(jì)70年代開(kāi)始,國(guó)內(nèi)外學(xué)者提出了許多重復(fù)性建設(shè)項(xiàng)目的調(diào)度方法,主要有針對(duì)水平類(lèi)重復(fù)性建設(shè)項(xiàng)目的Velocity Diagrams[5]、Linear Scheduling Method[6]等方法,針對(duì)豎直類(lèi)重復(fù)性建設(shè)項(xiàng)目的Line of Balance[7]、Repetitive Project Modeling[8]等方法,以及國(guó)內(nèi)學(xué)者提出的“流水施工”[9]、線(xiàn)性調(diào)度方法[10]等。上述方法盡管在一定程度上解決了特定問(wèn)題,但由于過(guò)程繁雜、可操作性欠佳,并未得到深入推廣。1998年Harris等[11]在總結(jié)前人研究的基礎(chǔ)上,提出了適用于水平和豎直類(lèi)重復(fù)性建設(shè)項(xiàng)目的 Repetitive Scheduling Method(RSM)。
RSM方法通過(guò)判斷相鄰工序的收斂/發(fā)散關(guān)系來(lái)確定工序的開(kāi)始、完成時(shí)間,并進(jìn)一步繪制RSM圖。該圖不僅能表達(dá)重復(fù)性建設(shè)項(xiàng)目進(jìn)展過(guò)程中時(shí)間與空間的對(duì)應(yīng)關(guān)系,更是此類(lèi)項(xiàng)目進(jìn)度控制與優(yōu)化中的重要工具。但文獻(xiàn)[11]繪制RSM圖的方法僅是一種圖示法,無(wú)法借助計(jì)算機(jī)輔助處理,不便適用于大型復(fù)雜項(xiàng)目;并且假設(shè)所有工序均只由一個(gè)班組施工,與實(shí)際生產(chǎn)不夠吻合。Yang等[12]在RSM基礎(chǔ)上做了進(jìn)一步研究,考慮實(shí)際情況賦予RSM計(jì)算功能,提出了通過(guò)計(jì)算確定工序開(kāi)始時(shí)間以繪制RSM圖的方法,編制了對(duì)應(yīng)的應(yīng)用程序,實(shí)現(xiàn)了自動(dòng)繪制RSM圖并進(jìn)行假設(shè)分析的功能;但其繪制RSM圖的計(jì)算過(guò)程比較復(fù)雜,且新軟件的應(yīng)用對(duì)使用者有較高要求,限制了該方法的推廣。Maravas等[13]考慮到實(shí)際生產(chǎn)中存在不確定性,提出了 Fuzzy Repetitive Scheduling Method(F-RSM),用三角模糊數(shù)來(lái)表示工人施工效率和工序施工持續(xù)時(shí)間,據(jù)此繪制的F-RSM圖可依據(jù)不同風(fēng)險(xiǎn)信息確定出相應(yīng)的進(jìn)度計(jì)劃信息,但該方法仍然存在與文獻(xiàn)[11]方法同樣的問(wèn)題。
欲在重復(fù)性建設(shè)項(xiàng)目的調(diào)度和優(yōu)化工作中切實(shí)使用RSM這項(xiàng)管理技術(shù),應(yīng)當(dāng)探索一種既能考慮實(shí)際施工情況,又可快捷、精準(zhǔn)繪制RSM圖的方法。本文正是提出了一種利用時(shí)間參數(shù)表通過(guò)簡(jiǎn)單數(shù)學(xué)計(jì)算就可繪出RSM圖的方法。
1 方 法
以重復(fù)性建設(shè)項(xiàng)目“共有m項(xiàng)施工活動(dòng),每個(gè)活動(dòng)包含s個(gè)作業(yè)單元”為研究對(duì)象,本文把構(gòu)成項(xiàng)目的施工活動(dòng)i稱(chēng)為工序系i(i=1,2,…,m),其在第j(j=1,2,…,s)個(gè)作業(yè)單元上的施工任務(wù)稱(chēng)為工序,記為ij。
重復(fù)性建設(shè)項(xiàng)目實(shí)際施工中,某工序系通常會(huì)有多種執(zhí)行模式,不同執(zhí)行模式下的施工持續(xù)時(shí)間、施工成本是不同的,制定進(jìn)度計(jì)劃時(shí),應(yīng)選用最佳的執(zhí)行模式;繪制RSM圖時(shí),需獲得各工序的開(kāi)始和完成時(shí)間、停工時(shí)間等時(shí)間參數(shù);RSM圖用于進(jìn)度管理時(shí),需確定出項(xiàng)目的控制序列并區(qū)分工序種類(lèi)。本文從上述三方面對(duì)繪制RSM圖提出了一種簡(jiǎn)便、快捷的方法,具體如下:
1.1 確定工序系的執(zhí)行模式
不同執(zhí)行模式下工序系施工采用的施工方法、消耗的勞動(dòng)力、原材料、設(shè)備等均不同,使得工序系采用不同執(zhí)行模式施工會(huì)有不同的施工持續(xù)時(shí)間、施工成本,故可根據(jù)施工持續(xù)時(shí)間和施工成本兩項(xiàng)指標(biāo)來(lái)確定工序系的執(zhí)行模式。
首先,對(duì)任意含有s個(gè)作業(yè)單元的工序系i,根據(jù)公式(1)、(2)篩選出滿(mǎn)足工期、勞動(dòng)力限制條件的施工執(zhí)行模式。
式中:Dij為工序ij的施工持續(xù)時(shí)間;Qij為工序ij的工程量;Ri為工序系i的產(chǎn)量定額;Nij為工序ij的施工工人數(shù);DM,ij為工序ij允許的最大施工天數(shù);NM,ij為可供工序ij使用的最大工人數(shù)。
然后,根據(jù)公式(3)~(5)計(jì)算按各可執(zhí)行模式施工所需的施工總成本。
式中:DCi為工序系i的直接施工成本;Ci為工序系i的基價(jià);ic為工程項(xiàng)目間接成本系數(shù);ICi為工序系i的間接施工成本;TCi為工序系i的施工成本。
為更好地說(shuō)明該步驟,以某工序系X舉例說(shuō)明。表1為該工序系按上述方法得到的三種可行執(zhí)行模式。管理者會(huì)根據(jù)項(xiàng)目實(shí)際情況、權(quán)衡施工持續(xù)時(shí)間與施工成本后,從這三種執(zhí)行模式中做出選擇。設(shè)工序系X選擇執(zhí)行模式1,則可得到工序系X各工序的施工持續(xù)時(shí)間并得到圖1所示的RSM圖。圖中斜直線(xiàn)表示工序系X的生產(chǎn)線(xiàn),其變化的斜率表明工序系X的施工效率是不斷變化的。需要說(shuō)明的是,盡管工序系會(huì)采用多個(gè)班組施工,但為保證RSM圖表達(dá)簡(jiǎn)潔,本文仍采用單根斜直線(xiàn)來(lái)表示工序系的生產(chǎn)線(xiàn)。
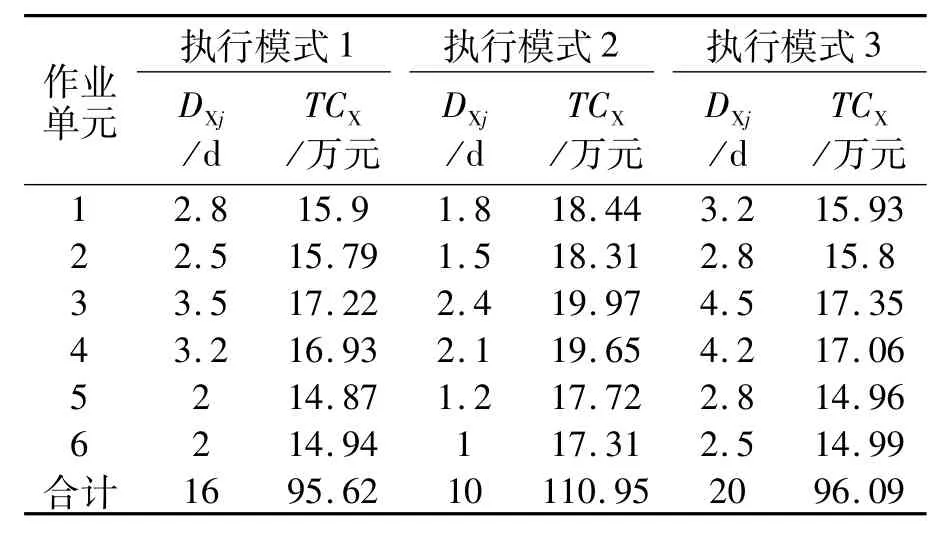
表1 工序系X執(zhí)行模式
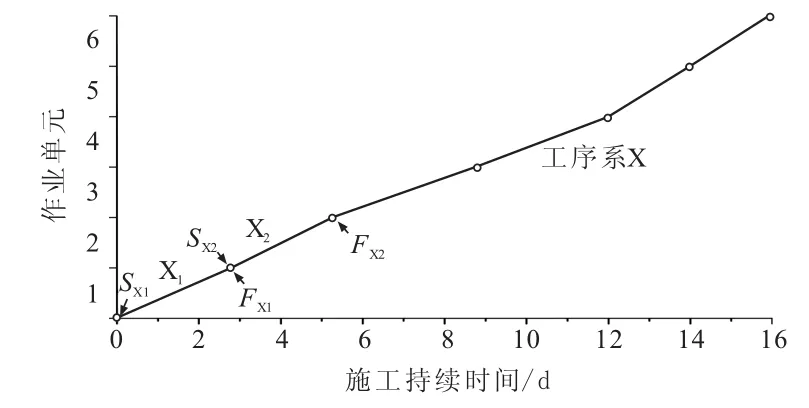
圖1 工序系X的RSM圖
1.2 計(jì)算工序系的時(shí)間參數(shù)
通過(guò)建立如表2所示的時(shí)間參數(shù)表匯總并計(jì)算工序系各項(xiàng)時(shí)間參數(shù)。對(duì)含有s個(gè)作業(yè)單元的工序系i(i≠1),其時(shí)間參數(shù)的計(jì)算步驟如下:
首先,確定工序系i中各工序的基本信息。
基本信息主要包括:(1)各工序所有緊前工序的開(kāi)始、完成時(shí)間;(2)各工序的施工持續(xù)時(shí)間;(3)各工序的停工時(shí)間,其值由項(xiàng)目管理者通過(guò)分析類(lèi)似項(xiàng)目,總結(jié)實(shí)際經(jīng)驗(yàn)估計(jì)得到。
其次,計(jì)算各工序初始開(kāi)始、完成時(shí)間。
設(shè)工序系i上的第一個(gè)工序從第0天開(kāi)始施工(S0,i1=0),根據(jù)公式(6)、(7)計(jì)算該工序系上其余工序的初始開(kāi)始時(shí)間和完成時(shí)間。

式中:S0,ij、F0,ij分別表示工序ij的初始開(kāi)始、完成時(shí)間;F0,i(j-1)為工序i(j-1)的初始完成時(shí)間;Iij為工序ij的停工時(shí)間。
再次,計(jì)算時(shí)間間隔TL。
工序系間的時(shí)間約束會(huì)影響工序系各工序的開(kāi)始、完成時(shí)間,計(jì)算時(shí)間參數(shù)時(shí)應(yīng)予以考慮。本文采用時(shí)間間隔TL來(lái)度量工序系間時(shí)間約束對(duì)各工序開(kāi)始、完成時(shí)間的影響,并將其定義為緊前工序系各工序開(kāi)始、完成時(shí)間與本工序系對(duì)應(yīng)的工序初始開(kāi)始、完成時(shí)間之間的差值。
工序系間的時(shí)間約束有開(kāi)始-開(kāi)始型(SS)、開(kāi)始-結(jié)束型(SF)、完成-開(kāi)始型(FS)、結(jié)束-結(jié)束型(FF)等四種類(lèi)型,根據(jù)公式(8a)~(8d)可計(jì)算出不同時(shí)間約束類(lèi)型時(shí)各工序的時(shí)間間隔(TLij),根據(jù)公式(9)可計(jì)算出工序系的時(shí)間間隔(TLi)。
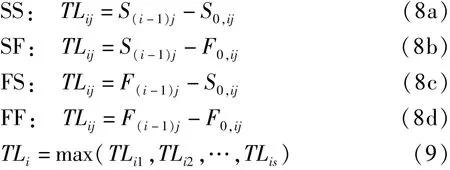
式中:TLij為工序ij的時(shí)間間隔;S(i-1)j、F(i-1)j分別表示緊前工序系(i-1)在j作業(yè)單元上的開(kāi)始、完成時(shí)間;TLij為工序系i的時(shí)間間隔。
最后,計(jì)算各工序開(kāi)始時(shí)間和完成時(shí)間。
因項(xiàng)目的第一個(gè)工序系不存在緊前工序系且常被安排在第0天開(kāi)始施工,所以其各工序的初始開(kāi)始、完成時(shí)間與實(shí)際開(kāi)始、完成時(shí)間相同,可不進(jìn)行此步計(jì)算;而項(xiàng)目中其余的工序系,則需根據(jù)公式(10)、(11)計(jì)算其各工序的開(kāi)始時(shí)間和完成時(shí)間。

式中:Sij、Fij分別表示工序ij的開(kāi)始、完成時(shí)間;TB(i-1)i為工序系i與其緊前工序系(i-1)間的時(shí)間約束值。
值得注意的是,如果工序系i存在多個(gè)緊前工序系,則TLi+TB(i-1)i應(yīng)取所有緊前工序系該值的最大值。
設(shè)工序系Y是第一步中工序系X的緊后工序系且已知工序系X從第5天開(kāi)始施工(SX1=5 d),其各工序的開(kāi)始、完成時(shí)間如表2中第2、3列所示;工序系Y各工序的停工時(shí)間和施工持續(xù)時(shí)間已確定,如表2中第4、6列所示;工序系X、Y間的時(shí)間約束類(lèi)型為FS,時(shí)間間隔為2 d。
本例中工序系各工序的施工持續(xù)時(shí)間是不斷變化的,若用文獻(xiàn)[11]中的圖示法來(lái)確定工序系各工序的開(kāi)始、完成時(shí)間不僅繁瑣且易出錯(cuò);而利用時(shí)間參數(shù)表,只需簡(jiǎn)單計(jì)算就可準(zhǔn)確實(shí)現(xiàn)。即根據(jù)公式(6)~(8)得到工序系Y各工序的初始開(kāi)始、完成時(shí)間,結(jié)果見(jiàn)表2第5、7列;根據(jù)公式(9)、(10)得到工序系Y在單元上的時(shí)間間隔,見(jiàn)表2第9列,易知 TLY=9.5 d;從而根據(jù)公式(10)、(11)計(jì)算出工序系Y各工序的開(kāi)始、完成時(shí)間,如表2第10、11列所示。
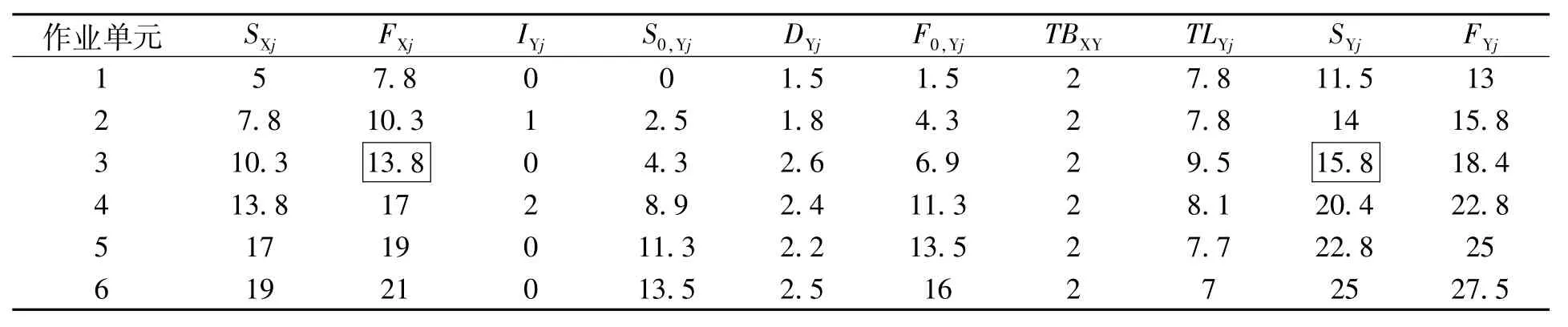
表2 工序系Y的時(shí)間參數(shù) d
圖2形象地展示了工序系Y的調(diào)度過(guò)程。在已知工序系Y基本信息的情況下,先假設(shè)該工序系從第0天開(kāi)始施工,計(jì)算出其在各工序上的初始開(kāi)始、完成時(shí)間,繪制出初始生產(chǎn)線(xiàn),然后把該生產(chǎn)線(xiàn)向右“平移”TLi+TB(i-1)i=9.5+2= 11.5 d長(zhǎng)度,就可得到工序系Y的最終生產(chǎn)線(xiàn)。

圖2 工序系X、Y的RSM圖
若工序系間為距離約束關(guān)系,則距離間隔、工序開(kāi)始、完成時(shí)間的計(jì)算方法與時(shí)間約束關(guān)系時(shí)類(lèi)似,不再贅述。
按照上述步驟依次計(jì)算m個(gè)工序系的時(shí)間參數(shù),就可繪出項(xiàng)目的RSM圖。但此時(shí)RSM圖包含的信息尚不足以指導(dǎo)項(xiàng)目管理工作,還需進(jìn)一步在RSM圖上確定項(xiàng)目的控制序列并區(qū)分工序的種類(lèi)。
1.3 確定重復(fù)性建設(shè)項(xiàng)目的控制序列并區(qū)分工序種類(lèi)
重復(fù)性建設(shè)項(xiàng)目的控制序列是指從項(xiàng)目開(kāi)始至完成,由工序相互連接并構(gòu)成最小工期的序列。按照是否在控制序列上、是否影響工期,重復(fù)性建設(shè)項(xiàng)目中的工序分為控制序列上的關(guān)鍵工序、非關(guān)鍵工序和非控制序列上的關(guān)鍵工序、非關(guān)鍵工序等四種,其性質(zhì)各異[14,15],需要區(qū)分種類(lèi)以采取針對(duì)性的管理。
RSM中某工序系的開(kāi)始、完成時(shí)間取決于本工序系及其緊前工序系的時(shí)間參數(shù)。本文將本工序系和緊前工序系上控制本工序系開(kāi)始、完成時(shí)間的一對(duì)時(shí)間點(diǎn)定義為控制數(shù)組CA,其中,緊前工序系上的時(shí)間點(diǎn)稱(chēng)為緊前控制點(diǎn)PCP,本工序系上的時(shí)間點(diǎn)稱(chēng)為緊后控制SCP。
以工序系Y為例,其時(shí)間間隔位于第3作業(yè)單元,因此該工序系的緊前、緊后控制點(diǎn)分別位于工序系X、Y的第3作業(yè)單元;又因工序系X、Y間為FS時(shí)間約束關(guān)系,根據(jù)文獻(xiàn)[11],工序系Y的生產(chǎn)線(xiàn)必定經(jīng)過(guò)SY3=15.8 d這一時(shí)間點(diǎn),即該時(shí)間點(diǎn)控制著工序系Y的開(kāi)始、完成時(shí)間及其在RSM圖上的位置。然而由公式(8c)和(10)可知,在工序系Y初始開(kāi)始時(shí)間和時(shí)間約束值已知的情況下,SY3的值取決于FY3的值,即FY3=13.8 d這一時(shí)間點(diǎn)通過(guò)控制緊后工序SY3的值,間接地控制著工序系Y的開(kāi)始、完成時(shí)間及其在RSM圖上的位置,所以(13.8,15.8)是工序系Y的控制數(shù)組,記為CAXY=(13.8,15.8),且PCPXY=13.8 d,SCPY=15.8 d。
已有研究中確定控制序列的方法,存在著因理解不當(dāng)導(dǎo)致錯(cuò)誤、因方法依賴(lài)于特定使用條件缺乏實(shí)用性[16]等問(wèn)題,且無(wú)法實(shí)現(xiàn)對(duì)工序種類(lèi)的區(qū)分;而利用本文定義的時(shí)間參數(shù)表和控制數(shù)組,可按下述步驟快速、準(zhǔn)確地確定出項(xiàng)目控制序列并區(qū)分工序種類(lèi):
首先,在時(shí)間參數(shù)表上標(biāo)注出項(xiàng)目的開(kāi)始、完成節(jié)點(diǎn)及所有工序系的控制數(shù)組。
其次,用箭線(xiàn)連接時(shí)間參數(shù)表上的控制數(shù)組以確定控制序列。
從項(xiàng)目完成節(jié)點(diǎn)開(kāi)始,在時(shí)間參數(shù)表上沿著工序系的逆向施工順序,依次用箭線(xiàn)連接控制數(shù)組直至項(xiàng)目開(kāi)始節(jié)點(diǎn);控制數(shù)組間箭線(xiàn)經(jīng)過(guò)的工序就構(gòu)成了控制序列。
需要指出的是,一個(gè)工序系可能存在一對(duì)以上的控制數(shù)組,相應(yīng)地項(xiàng)目會(huì)存在多條控制序列。
再次,根據(jù)時(shí)間參數(shù)表中的箭線(xiàn)類(lèi)型來(lái)區(qū)分工序種類(lèi)。
控制序列上的箭線(xiàn)有水平箭線(xiàn)和豎直箭線(xiàn)兩種。其中,水平箭線(xiàn)連接一對(duì)控制數(shù)組中的緊前、緊后控制點(diǎn)或同一工序的開(kāi)始、完成時(shí)間點(diǎn)。豎直箭線(xiàn)又可分為兩種,一種是箭頭向下、箭尾時(shí)間小于箭頭的正向控制箭線(xiàn),其連接的工序順序與施工順序一致;一種是箭頭向上、箭尾時(shí)間大于箭頭的反向控制箭線(xiàn),其連接的工序順序與施工順序相反。反向控制箭線(xiàn)的出現(xiàn),會(huì)使控制序列上其連接的工序和位于其前端的所有工序均成為非關(guān)鍵工序[14]。
當(dāng)時(shí)間參數(shù)表上只出現(xiàn)正向控制箭線(xiàn)時(shí),控制序列上所有工序都是關(guān)鍵工序。當(dāng)時(shí)間參數(shù)表上出現(xiàn)正、反向控制箭線(xiàn)時(shí),控制序列上還會(huì)出現(xiàn)非關(guān)鍵工序,即只有位于反向控制箭線(xiàn)之后的工序才是控制序列上的關(guān)鍵工序,其余的為控制序列上的非關(guān)鍵工序。
在時(shí)間參數(shù)表上找到控制序列上關(guān)鍵工序?qū)?yīng)的控制數(shù)組,位于控制數(shù)組前端的是非控制序列上的關(guān)鍵工序,其余的為非控制序列上的非關(guān)鍵工序。
確定控制序列、區(qū)分工序種類(lèi)的具體操作詳見(jiàn)案例應(yīng)用。
2 案例應(yīng)用
已知重復(fù)性建設(shè)項(xiàng)目M有6個(gè)工序系,每個(gè)工序系包含6個(gè)作業(yè)單元,工序系間的邏輯關(guān)系和時(shí)間約束關(guān)系見(jiàn)表3。
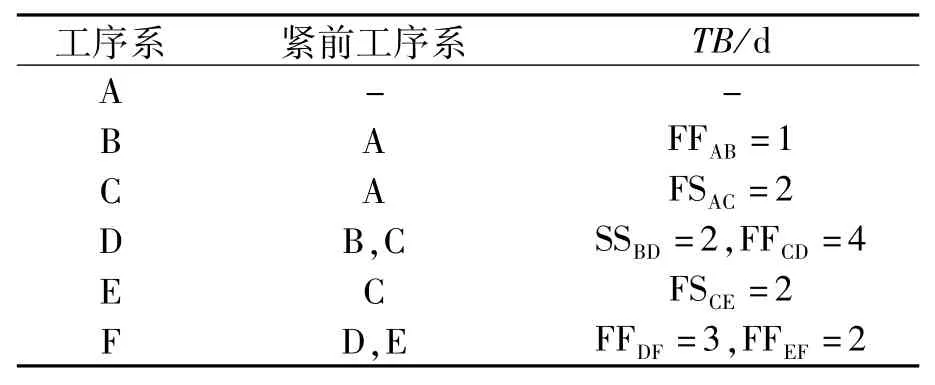
表3 項(xiàng)目M信息
繪制該項(xiàng)目的RSM圖,首先確定出各工序系的執(zhí)行模式,得到各工序的施工持續(xù)時(shí)間,見(jiàn)表4;管理者考慮停工策略,預(yù)計(jì)工序C4上有3天停工(IC4=3 d),工序E2、E4上均有1天停工(IE2= IE4=1 d)。
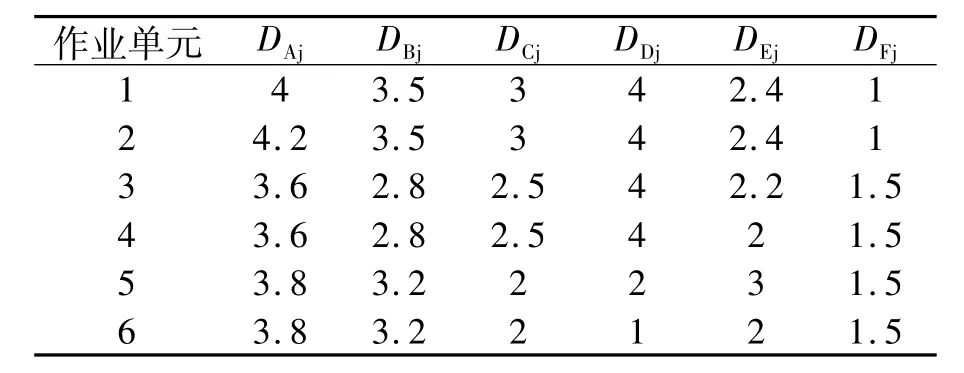
表4 項(xiàng)目M各工序施工持續(xù)時(shí)間 d
然后建立時(shí)間參數(shù)表計(jì)算各工序系的時(shí)間參數(shù),匯總所有工序系的開(kāi)始、完成時(shí)間得到項(xiàng)目M的時(shí)間參數(shù)表,見(jiàn)表5,得到項(xiàng)目的工期為34.5 d。至此,可根據(jù)表5的信息繪出項(xiàng)目M的RSM圖(圖3)。
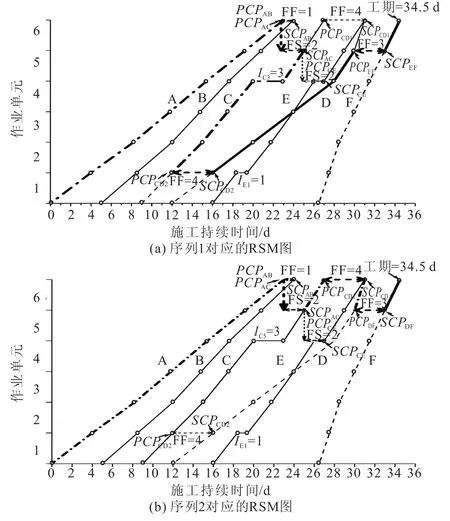
圖3 項(xiàng)目M的RSM圖
接下來(lái)確定項(xiàng)目M的控制序列并區(qū)分工序種類(lèi),具體操作步驟如下:
首先,標(biāo)注出項(xiàng)目M的開(kāi)始、完成節(jié)點(diǎn)及所有工序系的控制數(shù)組,如表5所示,該案例中工序系D有兩對(duì)控制數(shù)組,故項(xiàng)目M存在兩條控制序列。
其次,從項(xiàng)目M的完成節(jié)點(diǎn)34.5 d開(kāi)始,在表5上沿著工序系的逆向施工順序,用箭線(xiàn)把34.5與SCPDF=33 d相連,通過(guò)CADF=(30,33)到達(dá)點(diǎn)PCPDF=30 d;接著尋找工序系D上的緊后控制點(diǎn),若先連接PCPDF=30 d、與SCPCD1=16 d,并通過(guò)CACD1=(12,16)到達(dá)點(diǎn)PCPCD1=12 d,然后把該點(diǎn)與工序系C的緊后控制點(diǎn)SCPAC=25 d相連,通過(guò)CAAC=(23,25)到達(dá)點(diǎn)PCPAC=23 d。由于工序系A(chǔ)不存在緊后控制點(diǎn),故直接把PCPAC=23 d與開(kāi)始節(jié)點(diǎn)相連,得到項(xiàng)目M的控制序列1:A1~A6→C5~C2→D2~D5→F6。該控制序列如時(shí)間參數(shù)表6所示,在RSM圖3a中用粗線(xiàn)表示。

表5 項(xiàng)目M時(shí)間參數(shù)表 d
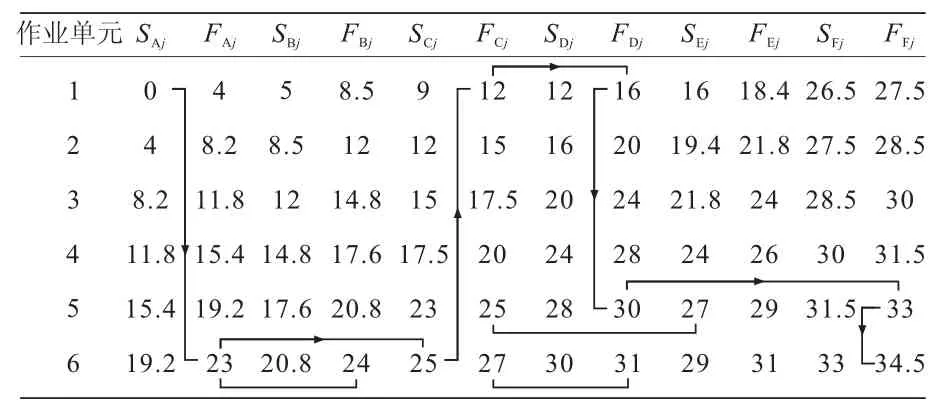
表6 項(xiàng)目M控制序列1在時(shí)間參數(shù)表上的表示d
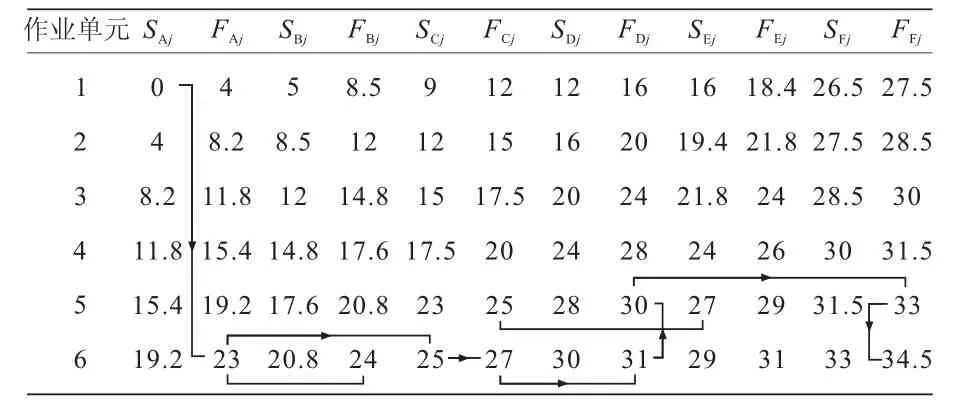
表7 項(xiàng)目M控制序列2在時(shí)間參數(shù)表上的表示d
因?yàn)闀r(shí)間參數(shù)表6上SCPBC=25 d與PCPCD1=12 d之間存在反向控制箭線(xiàn),所以控制序列1上既有關(guān)鍵工序也有非關(guān)鍵工序。根據(jù)區(qū)分工序種類(lèi)的方法,位于該反向控制箭線(xiàn)之后的D2~D5、F6工序是控制序列上的關(guān)鍵工序,在圖3a中用粗實(shí)線(xiàn)表示;控制序列上余下的A1~A6、C5~C2工序是非關(guān)鍵工序,在圖3a中用加粗的點(diǎn)劃線(xiàn)表示。
在時(shí)間參數(shù)表6上找到控制序列1上關(guān)鍵工序的控制數(shù)組(CACD1=(12,16)、CADF=(30,33))前端的工序C1、D1和F1~F5,它們是非控制序列上的關(guān)鍵工序,在圖3(a)中用細(xì)虛線(xiàn)表示,非控制序列上余下的B1~B6、C6、D6、E1~E6工序是非關(guān)鍵工序,在圖3(a)中用細(xì)實(shí)線(xiàn)表示。
同理可得項(xiàng)目M的控制序列2為:A1~A6→C6→D6→F6,該控制序列見(jiàn)時(shí)間參數(shù)表7所示,對(duì)應(yīng)的RSM圖見(jiàn)圖3(b)所示。
由該案例應(yīng)用可知,本文基于時(shí)間參數(shù)表的數(shù)學(xué)計(jì)算、控制數(shù)組判斷等工作,可以快速、準(zhǔn)確地繪出符合項(xiàng)目管理使用要求的RSM圖,并可實(shí)現(xiàn)確定控制序列、區(qū)分工序種類(lèi)等重要技術(shù),為后續(xù)重復(fù)性建設(shè)項(xiàng)目的進(jìn)度控制、優(yōu)化等工作創(chuàng)造了條件。
3 結(jié) 語(yǔ)
RSM圖是重復(fù)性建設(shè)項(xiàng)目調(diào)度與優(yōu)化的基礎(chǔ),是滿(mǎn)足工序邏輯關(guān)系、約束關(guān)系和資源限制條件的進(jìn)度計(jì)劃圖。本文提出了一種通過(guò)建立時(shí)間參數(shù)表來(lái)確定工序開(kāi)始和完成時(shí)間、據(jù)此繪制RSM圖的方法,不僅考慮了多執(zhí)行模式、停工等實(shí)際因素,較已有方法更符合實(shí)際生產(chǎn)狀況;并且其實(shí)現(xiàn)路徑不依賴(lài)于圖形的數(shù)學(xué)計(jì)算過(guò)程,具有操作簡(jiǎn)潔且便于計(jì)算機(jī)處理的優(yōu)勢(shì),因此能適用于大型復(fù)雜的項(xiàng)目;更為重要的是,還可以進(jìn)一步確定項(xiàng)目控制序列、區(qū)分工序種類(lèi)。基于時(shí)間參數(shù)表的RSM圖繪制方法,彌補(bǔ)了已有方法的不足,為根據(jù)RSM圖開(kāi)展重復(fù)性項(xiàng)目的進(jìn)度控制創(chuàng)造了條件。
[1]Vanhoucke M.Work continuity constraints in project scheduling[J].Journal of Construction Engineering and Management,2006,132(1):14-25.
[2]Hegazy T,Kamarah E.Efficient repetitive scheduling for high-rise construction[J].Journal of Construction Engineering and Management,2008,134(4):253-264.
[3]Hegazy T.Computer-based Construction Project Management[M].Upper Saddle River:Prentice Hall,2002.
[4]張立輝,潘楚云,鄒 鑫.重復(fù)性項(xiàng)目調(diào)度與網(wǎng)絡(luò)模型轉(zhuǎn)化方法[J].管理科學(xué)學(xué)報(bào),2014,17(6):49-59.
[5]Dressler J.Constructionmanagement in WestGermany[J].Journal of the Construction Division,1980,106(4):447-487.
[6]Johnston DW.Linear scheduling method for highway construction[J].Journal of the Construction Division,1981,107(2):247-261.
[7]Harris F C,Evans JB.Road construction-simulation game for sitemanagers[J].Journalof the Construction Division,1977,103(3):405-414.
[8]Reda R.RPM:repetitive projectmodeling[J].Journal of Construction Engineering and Management,1990,116(2):316-330.
[9]錢(qián)昆潤(rùn),葛筠圃.建筑施工組織與計(jì)劃[M].南京:東南大學(xué)出版社,1989.
[10]將根謀,熊 燕.線(xiàn)性計(jì)劃方法及其應(yīng)用研究[J].華東交通大學(xué)學(xué)報(bào),2008,25(5):8-11.
[11]Harris R B,Ioannou PG.Scheduling projectswith repeating activities[J].Journal of Construction Engineering and Management,1998,124(4):269-278.
[12]Yang IT,Ioannou PG.Scheduling system with focus on practical concerns in repetitive projects[J].Journal of Construction Managementand Economics,2004,22(6):619-630.
[13]Maravas A,Pantouvakis JP.Fuzzy repetitive schedulingmethod for projects with repeating activities[J]. Journal of Construction Engineering and Management,2010,137(7):561-564.
[14]Ioannou PG,Harris R B.Discussion of“algorithm for determining controlling path considering resource continuity”by Mohammed A,Ammar and Emad Elbeltagi[J].Journal of Computing in Civil Engineering,2003,17(1):68-70.
[15]Ioannou PG,Yang I T.Discussion of linear schedulingmodel and repetitive schedulingmethod by Kris G Mattila and Amy Park[J].Journal of Construction Engineering and Management,2004,8(3):461-463.
[16]張立輝,鄒 鑫,乞建勛,等.重復(fù)性建設(shè)項(xiàng)目中確定關(guān)鍵路線(xiàn)的方法研究[J].運(yùn)籌與管理,24(1):142-148.
Approach of RSM Diagram Draw ing Based on Time Parameter Table
JIANG Hong-yan,WANG Xin-ye,XU Rui
(School of Civil Engineering,Xi'an University of Architecture and Technology,Xi'an 710055,China)
RSM diagram is the foundation of scheduling control and optimization in repetitive construction project,yet the existing methods are still not good enough.The optimal resource utilization option of each activity group is identified to obtain the duration of each activity and assure consistency between RSM diagram and practical construction situation.Time parameter table,which includes the information of duration,start and finish time,interruption time,is established.Then,RSM diagram can be abtained quickly and accurately by simply calculating on time parameter table and shifting initial production line.The obtained RSM diagram has satisfy precedence and overlapping relationships,resource availability constraints. To provide sufficient information for project management,controlling array is defined to specify the controlling sequence and types of activities through operation on time parameter table.An example application is presented to illustrate the specific steps of drawing RSM diagram based on time parameter table.
RSM diagram;time parameter table;controlling array;controlling sequence
TB237
A
2095-0985(2016)04-0018-06
2015-12-23
2016-01-25
蔣紅妍(1974-),女,陜西富平人,副教授,博士,研究方向?yàn)橥聊竟こ探ㄔ炫c管理(Email:ggjianghy@163.com)
國(guó)家自然科學(xué)基金(51408459);陜西省自然科學(xué)基金(2014JM7296)
猜你喜歡
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導(dǎo)向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
中國(guó)房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56