交流傳動電力機車動力性能控制
2016-11-18 11:56:55王芳蘭
環球市場信息導報 2016年29期
關鍵詞:交流
◎王芳蘭
交流傳動電力機車動力性能控制
◎王芳蘭
文章通過對機車動力控制方式,交流電機的特性,及電機工作參數控制的方法,對機車牽引變流器的原理、結構、控制進行了細致的分析和論述。機車的控制是通過動態調整交流牽引電機實際工作點,以適應機車牽引特性的要求,四象限整流器調節的是輸入電壓與電網電壓的相位關系,牽引逆變器調節的是輸出電壓與交流牽引電機轉速的匹配關系,調節的主線是保持能量傳輸的動態平衡。使機車性能控制滿足重載牽引運輸的需要,并最大限度地利用了電網的牽引供電能力。
和諧系列大功率交流傳動電力機車現在已經成為我國重載牽引的主力機型,到現在我段配屬機車中,和諧1型、和諧2型大功率交流傳動電力機車占到配屬機車的80%以上。而現有技術資料有限,且由于知識產權和技術保密等原因,至今還沒有一種技術資料對其控制方式進行系統解釋和說明。為了方便廣大職工學習和掌握和諧型重載機車的理論知識,結合和諧1型、和諧2型、和諧3型大功率交流傳動電力機車的控制方式不同和本人的理解,現對和諧系列大功率交流傳動機車性能控制理論進行進一步的探討。
機車動力控制概況分析
機車性能參數的控制主要是由機車司機通過司機控制器來控制機車的工作狀態和參數,以達到控制機車動力輸出的工作狀態。從內燃機車、交直流傳動電力機車到交直交傳動機車,其控制方式和控制原理是有較大的區別的。
內燃機車由于機車自帶全部動力系統,其動力控制是通過控制發動機的轉速和輸出功率以及機車的牽引制動工況,實現完全控制機車的動力性能。
交直流傳動電力機車,由于其饋電電源來自交流電網,無法對線路上的每臺機車單獨控制,在電源動力轉換時,主變壓器采用有級控制的方式。通過控制主變壓器工作時的變比,控制傳動裝置輸出的電壓和功率。
對于以上兩種類型的機車,由于傳動裝置輸出能在較大速率范圍內符合牽引動力的牛馬特性,利用傳動裝置的自然特性,不需要對傳動裝置進行專門控制,只需要把司機控制器手柄信號轉換為發動機轉速控制信號或主變級數控制信號,就完全可以實現機車牽引動力和狀態的控制。
對于交直交流傳動的和諧系列大功率電力機車,由于采用了交流牽引電機作為機車動力驅動單元,而交流電機的工作特性自適應的工作范圍比較窄,只有在電源工作頻率下方很小的范圍內電機才能穩定工作,所以必需對傳動裝置進行相對復雜的動態控制,使其在機車全部工作狀態的范圍內,輸出使交流電機能夠穩定工作的可控制電源。

和諧系列機車的牽引特性分析
由和諧1型、和諧2型及和諧3型大功率交流傳動電力機車的牽引特性(如圖)可以看出,機車的全部工作范圍按速度可以分為3個階段:即恒牽引力工作區段、線性控制工作區段和恒功率控制工作區段三個限制工作區段。
在牽引工況下,分為機車恒牽引力(轉矩)啟動階段、線性控制加速階段和恒功率調速牽引工作區段。在啟動階段,機車速度低于5km/h(和諧3型機車為10km/ h)時,機車牽引力恒定不變,在機車速度達到65km/h(25噸軸重機車為70km/h)時,機車進入恒功率調速控制模式,在5km/h到65km/h之間的區間采用線性調速控制模式。和諧1型和和諧2型機車控制采用無級調速恒速控制方式,而和諧3型機車采用分級調速控制方式,在機車手柄級數較低時(5級以下)不會進入力矩限制工作區段,機車從恒牽引力工作狀態直接進入準恒速工作狀態;在機車手柄級數較高(7級以上)時,機車經過恒牽引力控制、線性控制和恒功率控制三個限制工作區段進入準恒速工作狀態,當機車速度進入較高速度范圍,電機工作電壓和工作電流都達到最大值時,只能改變輸出頻率進行調速,機車進入限制特性工作區。
在機車動力制動工況下,在機車運行速度較高時,機車工作在恒功率制動控制模式,在機車運行速度較低接近停車區域時,機車工作在線性控制工作模式,在中間區段,機車工作在恒制動力的限制工作模式。在參數設計上,和諧1型機車23噸軸重和25噸軸重機車工作區段轉折點相同,都是5km/h和75km/h。和諧2型機車線性限制工作區與恒制動力限制工作區的轉折點是10km/h,恒功率制動限制工作曲線在機車不同軸重情況下,進入恒制動力限制工況轉折點的速度和制動力是不同的,軸重越大,其制動力越大,轉折點速度越低。和諧3型機車采用有級控制準恒速控制模式,機車采用25噸軸重時在恒制動力區和恒功率區的制動力都要比23噸軸重機車的制動力要大,而各個手柄位的限制曲線不變,手柄位越高,其限制制動速度越高,當機車運行速度低于限制速度時機車動力制動力會迅速下降,機車失去動力制動的作用,在操縱中司機要根據機車運行速度的變化及時調整手柄位置,保證機車處于正常動力制動的工作狀態。
和諧系列機車牽引電機特性分析
和諧系列大功率交流傳動電力機車牽引電機采用感應式三項異步電動機。根據交流電機的扭矩特性(如圖4)可以看出,交流電機在電源電壓和頻率不變的情況下,其工作范圍可分為三個部分,從電機啟動點A到最大扭矩點B之間,電機的扭矩隨著轉速的增加而增大,電機處于加速啟動狀態,在電機轉速超過最大制動扭矩B’點以后,制動扭矩隨轉速的增大而減小,在這兩個工作區段,電機處于不穩定的工作狀態;從電機最大扭矩點B到同步轉速點C之間,電機輸出扭矩隨著轉速的增加迅速減小至零,超過同步轉速點C之后,電機進入動力制動狀態,變為按照發電機工作狀態運行,到最大制動扭矩B’點之間,制動扭矩隨轉速的增大而增大,電機輸出特性與負載特性相匹配,電機處于穩定的工作狀態。當機車由于負載變化,速度增加時,電機通過減小輸出扭矩或增加制動扭矩,使機車速度回復穩定的工作速度,達到新的工作平衡點。同樣,當機車由于負載變化,速度減小時,電機通過增大輸出扭矩或減小制動扭矩,使機車速度回復穩定的工作速度,達到新的工作平衡點。在從B點到B’點的全部工作區段中,電機在每一點都可以通過動態調整是電機自動處于穩定的工作狀態。交流電機穩定狀態工作轉速范圍很小,當電機轉速與旋轉磁場一致達到同步轉速時,電機的輸出扭矩降為零。也就是說要使電機一直保持穩定的工作狀態,必須把電機的轉差率控制在一個很小的范圍內,使電機轉速穩定工作在同步轉速附近。
轉子電流I2和轉子功率因數COSφ2可用公式表示,帶入轉矩公式后,公式可變換為:

E20為電機靜止時轉子自感電動勢,S為轉差率,R為轉子內阻,X20為電機靜止時轉子感抗。
額定工況工作時電機轉差率S很小,與轉子阻抗R2相比S·X20可以忽略不計,而Φ、E20都與電壓U成正比,交流電機的扭矩公式可以變換為T=K(U/f)2fs,fs為轉差頻率。從公式可以看出電機輸出扭矩與電源電壓與頻率的比值的平方成正比,與電機的轉差頻率成正比。根據交流電機特性曲線(如圖4)、和諧系列機車的牽引制動特性曲線(如圖1-3)及和諧1型、和諧2型及和諧3型機車牽引電機特性曲線(如圖5-7)要求可以看出,只要分別控制變流器輸出的頻率、電壓,就可以控制交流牽引電機同步轉速和輸出扭矩,按機車設計的牽引和制動特性曲線,控制機車按設定的參數運行。

和諧系列機車牽引變流器性能控制的分析與探討
根據交流牽引電機的特性分析,通過調整主變流器輸出電壓的頻率,可以調控交流牽引電機的同步運行轉速。在變流器輸出電壓不變時,隨著電機運行轉速的增加,電機輸出扭矩與電源頻率的平方成反比例下降。為了使變流器的輸出與交流電機的工況相匹配,需要單獨控制變流器的輸出的電壓和頻率。
分析和諧1型、和諧2型、和諧3型大功率交流傳動機車主變流器,雖然其所選原件和控制參數有所差異,其控制原理都是一樣的。
機車主牽引變流器分為四象限整流器、中間直流環節和四象限逆變器三個部分,整流器和逆變器的核心原件都是采用的IGBT模塊。IGBT(Insulated Gate Bipolar Transistor)絕緣柵雙極型晶體管,有輸入阻抗高和導通壓降低兩方面的優點。驅動功率小,非常適合應用于變頻器。IGBT模塊是由IGBT(絕緣柵雙極型晶體管芯片)與FWD(續流二極管芯片)通過特定的電路橋接封裝而成,封裝后的IGBT模塊直接應用于變頻器。中間直流環節采用巨型電容作為儲能元件,可以把整流器和逆變器隔離開來,吸收IGBT模塊通斷時產生的高次諧波,使中間直流環節保持穩定的工作電壓。由于主變流器的四象限整流器和四象限逆變器都采用IGBT模塊,在不采取任何控制時,整流器就是一個全橋單相整流器,逆變器就是一個三相全橋整流器。在對IGBT進行控制的情況下,整流器和逆變器都可以在四個相限進行工作。通過控制IGBT模塊的通斷,控制交流端電壓的大小、頻率和相位角,就可以控制其工作在整流器或者逆變器的工作狀態。下面對變流器各工作單元在不同工況下工作狀態進行具體的分析。
機車牽引工況下變流器工作狀態分析
由于IGPT模塊開關損耗及冷卻條件的限制,其最大工作頻率受到一定的限制,調制頻率不能超出IGPT的限制工作頻率。在高速區段,由于變流器輸出端電壓已經達到工作的最大值,只能通過調整輸出頻率和轉差頻率來調節機車運行速度,因此,在高速區段可采用單倍頻方波調制方式,直接輸出方波電壓波形。在速度較低時,由于輸出頻率較低,采用方波調制會產生較大的諧波干擾,功率因數較低,為了改善波形,提高效率,改善牽引電機的工作條件,一般釆取方波脈沖調制方式輸出。
變流器的輸出最終是要控制三相交流牽引電機進行調速,從牽引逆變器的控制來看逆變器要實現以下三方面作用:
首先要進行相位控制來保證按三相交流電相位進行輸出;通過對逆變器三相整流模塊W、M、N的IGPT模塊控制的調制基波按120度的相位差進行控制,由于三相橋輸出波形與與其對應的調制基波波形保持一致,可保證牽引逆變器按標準三相交流電相位進行輸出。第二,要進行電壓和頻率控制,保證牽引電機扭矩特性按機車的牽引特性要求輸出;要控制變流器輸出電壓與頻率的比值大小,使其與牽引電機輸出扭矩一致。逆變器的輸出是通過IGBT模塊的通斷,使其輸出端與中間直流電源或地直接聯通,使其輸出幅值為直流電源電壓的矩形脈沖。通過調制波與載波信號的比較來控制IGBT模塊的通斷,改變載波與調制波的幅值比,可以改變IGBT模塊輸出的占空比,相應的改變單個周期的電壓的平均值;通過改變單位時間內周期的個數,改變輸出電壓的頻率,可以改變交流電機的同步轉速。在調節過程中保持電壓與輸出頻率的比值不變,可以保持電機輸出的扭矩在速度變化時保持不變,實現電機的恒扭矩調速。第三、要進行轉差率控制,保證電機工作在穩定工作區;從電機扭矩特性曲線可以看出,在電機加速調節過程中,隨著電機轉速的增加,轉差率迅速減小,當電機轉速接近到同步轉速時,電機輸出扭矩迅速減小到零輸出。當電機轉速減小,轉差率增大時,電機輸出扭矩同時增大,提高機車的加速能力。如果超過最大扭矩點,電機進入不穩定工作區,就會造成扭矩輸出迅速減小,造成機車途中停車。所以,牽引逆變器的控制主要是根據機車實際運行速度,也就是電機的轉速,控制逆變器調制基波的頻率,使電機工作在規定的轉差率范圍內,同時控制輸出電壓大小,使牽引電機扭矩輸出按機車牽引曲線運行。由于電機轉差率控制在很小的數字上,使電機的功率因數保持很高接近于1,保證電機輸入的功率全部用于對外輸出,提高了機車能源利用效率,同時減小了電機的諧波沖擊和電機發熱,改善了電機的工作條件。
根據電機的扭矩特性分析,電機在輸入電壓和頻率不變的情況下,電機的輸入電流可用以下公式表示:
I=(U-E1-E2)/R
U—輸入端電壓;E1—定子線圈自感電動勢;E2—轉子線圈互感電動勢;R—定子線圈電阻。
在電機啟動之前,由于電機轉子處于靜止狀態,定子線圈的自感電動勢是保持恒定抵消絕大部分電壓,E2反向最大,電源合成后,相當于E2電壓全部加在定子電阻上,電機的啟動電流非常大,一般電機的啟動電流都在額定電流的6~8倍左右。隨著電機轉速的升高,E2迅速增大,使電機電流迅速減小。在電機穩定工作區的范圍內,電機電流隨轉速的增加成線性減小關系。

四象限整流器是變流器中的另一個主要環節,是變流器中的能量輸入環節,與中間直流儲能環節共同構成能量傳遞的傳送控制鏈。
四象限整流器主要要解決以下幾個問題:保持中間直流環節的電壓保持穩定;保持整流電流滿足牽引電機工作時的需要;保證機車供電電流變化趨勢與電網供電電壓相匹配。
從四象限整流器的結構分析,四象限整流器采用IGBT元件與二極管反向并聯的方式,使其具有電流雙向流通單向可控的特點,按照全橋整流方式聯結后,使其整流具有雙向可控的能力,在交流端電壓或直流負載發生變化的情況下,直流輸出電壓可以控制在恒定的狀態。
四象限整流器在IGBT控制信號關閉的情況下,與二極管全橋整流電路是一樣的。由于電路中存在非線性的濾波電容和和電機線圈電感元件,電路的功率因數不可能達到1.0的數值。采用四象限整流的主要功能就是實現功率因數的控制。
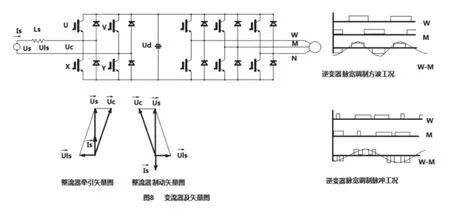
四象限整流器控制功率因數的方法是讓網側電流接近正弦波,并且與電壓同相。為控制電壓和電流的相位關系,在變流器的四象限整流器與主變供電線圈之間串聯一個電感線圈,用以補償變流器工作時由于負載電流變化中間直流環節濾波電容造成的供電電源相位的變化。由于補償電感線圈的電壓Uls超前電流Is相位90度,電壓的大小與通過的電流Is和頻率f成正比,所以,必須控制四象限整流器輸入電壓Uc與電源電壓Us之間的相位與電源Us初相位偏移角φ,使電感線圈電壓與整流器輸入電壓的非線性分量Uc*sinφ相互抵消,才能使主變輸出端的電壓Us和電流Is相位保持一致,使機車的功率因數為1.0,其矢量圖如圖8所示。
由于串聯電感線圈的存在,并且四象限整流器釆用PWM調制技術,因此四象限整流器實質上是個升壓斬波器。在交流電流正半周期內當V、X模塊導通時,電網電源Us和直流電源Ud形成疊加效應,快速向電感線圈充電,當V、X有一個模塊導通時,通過U、Y對應的續流二極管,電網電源Us繼續對電感線圈進行充電;當V、X模塊全部截至時,由于電感元件電流的連續性,電網電源和電感線圈電壓疊加通過U、Y的續流二極管對中間直流電源進行供電,由于電感的疊加作用,可以使中間直流電源獲得比電源最大整流電壓更高的電壓,具有升壓整流的作用。同樣在交流電流負半周期內,U、Y模塊的作用與正半周V、X模塊起到的作用相同。
和諧系列機車四象限整流器的工作原理是一樣的,根據機車選用IGBT模塊參數的不同,其工作參數也各有所不同。和諧1型機車IGBT模塊最大開關頻率250Hz,采用5倍頻同步調制,最大輸入電流1712A。和諧2型機車最大開關頻率800Hz,采用15倍頻同步調制,最大輸入電流1699A。和諧3型機車最大開關頻率450Hz,采用9倍頻同步調制,最大輸入電流966A。逆變器與四象限整流器采用相同的元件,具有較高的輸出頻率范圍,分別是0-116Hz、0-141Hz和0-120Hz。最大輸出電流分別為1566A、1900A和520A。由于開關原件受到開關損耗和冷卻調件的影響,開關頻率收受到限制,在機車中高速工作區段,一般采用同步脈沖調制方式。隨著輸出頻率的降低,脈沖調制輸出波形失真逐步增大,功率因數降低,穩定工作點的離散性也越來越大,工作狀態變差。為了充分利用IGBT模塊的開關頻率,改善逆變器在低頻率輸出區段的波形,一般采用異步脈沖調制方式。
機車制動工況下變流器工作狀態分析
根據交流牽引電機的特性曲線可以看出,在電機轉速超過同步轉速后,電機轉子相對旋轉磁場的運動方向發生改變,轉差率變為負值,電機輸出扭矩方向發生改變,電機進入動力制動狀態。電機電流方向也發生改變,由流入電機變為流出電機,電機由電動機狀態轉為發電機狀態運行。
對于牽引逆變器來說,其控制輸出的相位、電壓和頻率控制與牽引工況是一樣的,所不同的是輸出電流的方向發生改變,并控制電機轉差率為負值,使電機在穩定的工作范圍以內工作。
對于四象限整流器來說,牽引工況下控制整流器輸入電壓Uc相位角滯后電網電源電壓Us,能量流動電網流向變流器方向。在動力制動工況下,整流器輸入電壓Uc相位角變為超前電網電源電壓Us,在同樣的控制信號狀態下,由于電壓的相位發生變化,在交流電流正半周期內當控制信號加在V、X模塊上時,由于模塊兩端的電位差反向,模塊并不導通,電感線圈通過V、X模塊對應的續流二極管對電網和中間直流環節放電。當控制信號加在U、Y模塊上時,模塊導通,直流電源Ud通過U、Y模塊向電感線圈Ls及電網電源Us反向充電,當U、Y只有一個模塊導通時,由于電感元件電流的連續性,電感線圈通過導通模塊U(Y)和模塊V(X)的續流二極管,繼續對電網電源Us進行充電;同樣在交流電流負半周期時,V、X模塊的作用與U、Y模塊在正半周起到的作用相同。
通過以上分析可以看出,在機車制動工況下,牽引逆變器輸出電壓的頻率低于交流牽引電機轉子的轉動頻率,電機在負轉差率工況下運行,在交流電機轉子內部產生感應電流的頻率為f2-f1,電機工作在異步發電狀態,發電頻率為f2-(f2-f1)= f1,與逆變器輸出頻率和相位都相同,幅值大于逆變器輸出,使逆變器工作電流反向,逆變器實際上工作在可控三相四象限整流器狀態。而四象限整流器,由于控制基波相位超前于電網電壓相位,四象限整流器交流端電流也同時發生反轉變為向電網饋電,四象限整流器工作在可控逆變器狀態。與牽引逆變器所不同的是,四象限整流器逆變工作的輸出頻率與電網頻率相同,是固定不變的。
在和諧系列大功率交流電力傳動機車動力傳輸系統中,交流牽引電機是動力輸出的執行環節,機車動力與性能的控制是通過動態調整交流牽引電機實際工作點,以適應機車牽引特性的要求,并最大限度地利用牽引供電的能力。牽引變流器是電源與交流牽引電機之間的中間環節,把動力源與輸出單元隔離開來,單獨的進行控制,使交流變換控制的復雜問題得到簡單化的處理。同理通過大電容的變流器中間直流儲能環節把變流器的四象限整流器與逆變器隔離開,使整流器和逆變器的各種調節和變換都在中間直流環節保持穩定的電壓下進行。四象限整流器調節的是輸入電壓與電網電壓的相位關系,牽引逆變器調節的是輸出電壓與交流牽引電機轉速的匹配關系,調節的主線是逆變器直流端輸入輸出的電流與整流器直流端輸入輸出的電流保持一致,也就是保持能量傳輸的動態平衡。牽引逆變器的控制基準參數是牽引電機的轉動頻率,四象限整流器的控制基準參數是中間直流環節的工作電流,由于中間直流環節電壓保持恒定,四象限整流器的實際控制基準參數是牽引電機的輸出功率的大小。通過這種方式,使機車性能控制滿足重載牽引運輸的需要,并使功率因數保持在1.0附近,最大限度地利用了電網的牽引供電能力。
(作者單位:大秦鐵路股份有限公司湖東電力機務段教育科)
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
