建筑機器人研究現狀與展望
2016-11-18 02:04:44西安建筑科技大學信控學院于軍琪雷小康
自動化博覽 2016年8期
西安建筑科技大學信控學院 于軍琪雷小康
西安交通大學電信學院 曹建福2
建筑機器人研究現狀與展望
西安建筑科技大學信控學院 于軍琪1雷小康3
西安交通大學電信學院 曹建福2
1 引 言
在人類所有工程實踐活動中,建筑業歷史最為久遠——當人類先祖尚未成“人”時,它們便已開始了各種各樣以“遮風雨、避寒暑”為目的的營建實踐。建筑施工形態不僅與人類的生產、生活休戚相關,同時也承載了厚重文明印記和文化特色。然而,一個無法回避的現實是,近百年來,雖然自然科學與工程技術領域的革新不斷,建筑本身的形態和功能也與以前大為不同,但建筑施工的業態形式卻始終沒有出現顯著的變化。如果我們審視今天的建筑施工形態,誠如百余年前先輩們的營建工作一樣,依然被粗放、傷亡、污染、浪費這些與時代主題相悖的業態標簽所充斥。相較于制造業、農業、航空航天、交通運輸、金融、商貿等其他行業如今所具有的現代化、智能化、信息化、自動化等業態標簽,建筑行業的施工、管理與營建方式,遠未跟上時代進步與革新的步伐。今天的建筑業比以往任何時候都需要一場變革,這一需求迫在眉睫。
在既有的現代化技術體系中,最有可能承擔起建筑業革新重任的便是機器人技術。機器人是近代機電技術與信息技術高度發展的產物,具有強烈的時代符號。過去30年間,隨著機器人技術逐步投入應用,很多行業的業態發生了翻天覆地的變化,其中以制造業尤其是汽車制造業最為典型。機器人技術源自人們祈求擺脫“危、繁、臟、重”工作的本能需求,而建筑業幾乎集這些弊端于一身——工作強度大、繁復;工作環境差、危險,兩者具有極高的契合。由此,便特化出了“建筑機器人”(Construction Robotics)的概念,以期通過機器替代或協助人類的方式,先期達成改善建筑業工作環境、提高工作效率的目的,最終實現建筑物營建的完全自主化。
值得欣喜的是,近年來機器人技術出現了向建筑業滲透的趨勢,建筑施工用機器人系統的研發已引起了很多研究機構和高科技公司的關注,出現了一些可完成簡單施工工序的初級實驗或商用系統。盡管如此,建筑機器人的發展總體上還處于欠發展階段,對于機器人技術如何與建筑業相結合、建筑業如何適應機器人的介入等基本性問題,目前都還沒有形成清晰、統一的發展圖景。本文試圖通過對現有典型建筑/施工用機器人系統研發動態的梳理和介紹,闡釋建筑機器人發展的現狀與趨勢。藉此,闡明建筑機器人的概念內涵,拓展相關研究的思路,為我國建筑機器人的發展提供參考。
中國自動化學會亦根據建筑業發展新趨勢及對機器人的急切需要,成立了建筑機器人專業委員會,希望為解決以上問題,促進行業技術普及與應用發揮重要“橋梁”作用。
2 發展建筑機器人的背景及意義
機器人技術進入建筑業領域是技術及時代發展的必然,由此將催生建筑業的一次革命。歸結起來,建筑機器人的提出背景及意義體現在以下幾個方面。
第一,建筑機器人是營建效率急需提升的必由之路。在現在的建筑施工中,雖然已有大量機械設備參與,但更多的工序還是有賴于手工作業,導致建造周期綿長,少則數月,多至數年。而采用機器人技術,可使建造效率大獲提升。以歐美的標準民居為例,傳統人工作業的平均建造周期約為6~9個月,但若采用最新的機器人3D打印技術,建造周期可大幅縮短至1~2天。這意味著遭遇地震、恐怖襲擊、泥石流等災難后,可以快速完成居所重建,保障居民的基本生存條件,這在以往是無法想象的。
第二,建筑機器人是保障施工人員安全、提升工作品質的必然選擇。建筑業是公認的高危行業,傷亡率僅列于礦山與交通事故之后。例如在美國,建筑業每年造成約40萬人的死傷,已成為嚴重的社會問題。另外,建筑施工人員的工作條件極差,繁重的操作,充斥著泥漿、粉塵、噪聲、震動等工作環境,極大地危害著從業人員的身心健康,導致職業病高發。若要將建筑工人從中解脫出來,就現有技術發展水平來看,機器人技術或是破解這一難題最佳,也可能是唯一的途徑。
第三,建筑機器人是人力資源日益短缺的必然選擇。隨著社會老齡化趨勢的不斷加速,青壯年勞動力的供給將日益緊缺。加之建筑業所具有的“危、繁、臟、重”屬性,若未來建筑業不能成功去除這些不利標簽,“重塑”自我形象,勢必無法吸引年輕勞動力進入這一行業。以澳大利亞為例,2015年該國泥瓦匠的平均年齡已達55歲,若短期內無法吸引更多的年輕人加入,5~10年之內該國便面臨無工可用的尷尬局面。
第四,建筑機器人是構建節約型社會的時代訴求。建筑業屬于資源需求極為密集的行業,而傳統的手工作業方式又流于粗放,建材使用不能精確控制,導致營建過程的材料浪費極為巨大。據美國有關部門測算,一棟普通民居建造過程的材料浪費率高達40%。此外,老舊建筑的拆除目前還未形成資源化回收的觀念,除鋼筋等少數金屬材料外,其他材料均被作為建筑垃圾填埋,這種資源浪費的規模難以估量。事實上,若采用建筑機器人代替人工施工,通過合理規劃和精細化作業,可大幅減少原材料浪費,甚至實現零浪費;利用機器人技術也可以實施老舊建筑材料的回收再利用。這些無形之中將會降低建筑成本,也符合構建節約型社會的時代價值要求。
第五,建筑機器人是實現人與自然和諧發展的有效途徑。傳統建筑施工均為“侵入式”開發,先開挖破壞原有植被,這一方式對于自然環境的破壞性很大。另一方面,建筑施工期間產生的固體垃圾、廢水、有毒有害物化學物質也會對環境產生很大危害。此外,水泥、鋼材、玻璃等原材料的生產,對于環境的污染也很大。在倡導環保的時代大背景下,如何實現更具環境友好性的營建開發、減少垃圾及廢物排放、提高原材料的利用率,均是時代對于建筑業革新的迫切要求。而以建筑機器人為代表的未來數字化營建技術,有望徹底重塑建筑業的面貌,實現真正的綠色環保、無污染的營建。
最后,從建筑技術的演進與革新的角度出發,機器人技術有望搭建起連接設計概念與實體之間直接溝通的橋梁,使得建筑師的構想能夠更為快速地變為現實。正如ETH Zurich的建筑與數字建造專家Gramazio & Kohler所認為的那樣:以建筑機器人為代表的數字化建造(Digital fabrication)技術是連接數字世界和物質世界的有力工具,它讓在虛擬環境進行的創意和設計,從數字信息進一步變成物質的現實。建筑機器人技術在重復生產上更有效率,也可在非標準建造上實現人手所無法實現的可能性。
今后十多年內,若建筑機器人技術得以大規模投入應用,那這對于建筑業的意義絕不亞于“脫胎換骨”。機器人技術改變的不單是施工方式,而是實施營建的理念。整個建筑業體系——從設計、營造到使用、維護,將因此得到重塑,低效、危險、污染、浪費、勞動力密集等行業標簽將成為歷史,高效、環保、創意、智能、自動化將成為機器人時代建筑業的新標簽。
3 研究現狀
世界上最早的建筑機器人誕生于20世紀90年代初期的德國,此后,雖然歐美等發達國家對于建筑機器人的研究從未中斷,但遺憾的是這些設備一直未能投入應用。直到近幾年,才陸續有一些系統走出實驗室,被應用于實際之中。就概念而言,建筑機器人包括“廣義”和“狹義”兩層含義。廣義的建筑機器人囊括了建筑物全生命周期(包括勘測、營建、運營、維護、清拆、保護等)相關的所有機器人設備,涉及面極為廣泛,常見的保潔、遞送、陪護等服務機器人,以及管道勘察/清洗、消防等特種機器人均可納入其中。狹義的建筑機器人特指與營建施工作業密切相關的機器人設備,其涵蓋面相對較窄但具有顯著的工程化特點,典型系統包括墻體砌筑機器人、3D打印營建系統、基坑清理機器人系統等。本節針對狹義的建筑機器人,對目前一些具有代表性的系統加以梳理和介紹。
3.1墻體砌筑機器人
世界上第一臺建筑機器人誕生于墻體砌筑方面。1994年,德國卡爾斯魯厄理工學院(KIT)研發了全球首臺自動砌墻機器人ROCCO;同期的1996年,斯圖加特大學開發了另一型混凝土施工機器人BRONCO。之后,哈佛大學、卡內基梅隆大學等機構也都開展過一些建筑機器人研究。不過,受當時經濟及技術條件所限,這些早期砌筑機器人系統均未投入實際使用,但是為后續型號的研究提供了前期的概念和理論鋪墊。近年來,隨著機器人技術走向成熟,以及勞動力成本的不斷起高,砌筑機器人系統的研發重獲發展契機,甚至部分系統已投入商業應用。現有的墻體砌筑機器人大多基于工業機械手改裝而成,一般具有“移動平臺+遞送系統+機械臂”的體系結構。典型代表如美國Construction Robotics公司的SAM(semi-automated mason)系統、ETH Zurich研發的In-situ Fabricator系統,以及澳大利亞Fastbrick Robotics公司的Hadrian109砌筑機器人系統(如圖1所示)。
SAM100砌筑機器人系統的核心是一具配備夾具的通用工業機械手、一套磚料傳遞系統以及一套位置反饋系統。機器人采用軌道式移動機構,由于工作軌道需事先人工鋪設,故工作范圍及靈活性受到一定限制。事實上, SAM100系統的設計初衷并非完全替代工人工作,而在于配合工人提高砌筑作業的效率,故采用了半自主化的工作模式。單臺設備可使墻體砌筑效率提高3~5倍,減少工人超過80%的磚料抓舉作業。目前,SAM100砌筑機器人系統已投入商用。
In-situ Fabricator是一套用于非確定環境下砌筑作業的全自主機器人系統,其主體由一個汽油機驅動的履帶式移動平臺頂置一具6軸ABB工業機械臂組成,機械臂前端配置吸盤式抓取裝置。該系統通過配置于機械臂前端的2D激光雷達獲取環境信息,用于監測砌筑進程、構建工作環境3D模型并實現機器人的自定位。與SAM100系統相比,In-situ Fabricator系統引入了魯棒與自適應建筑技術,使得該機器人系統具備非標準墻體砌筑能力,并就墻體變化動態調整砌筑過程。與此同時,該系統還集成了移動機器人的自主導航技術,使其能夠工作于存在障礙物的復雜施工環境,其自主性和智能化程度得到了提升。In-situ Fabricator系統的砌筑效率約為人工的20倍,不過目前該系統尚處于實驗階段。
上述兩種砌筑機器人適用于小范圍作業,與此不同,Hadrian109砌筑機器人系統,可以以單體建筑物的尺度開展工作。Hadrian109系統基于履帶式挖掘機平臺改裝而成,配備一具長達28m的兩段式伸縮臂,沿臂敷設有磚塊遞送軌道,其末端配備磚塊自動夾取/砌筑裝置。該機器人系統可基于CAD 3D模型自主完成建筑物的營建,砌磚速度高達1000塊/h,砌筑精度可達0.5mm水平,可在1~2天內建造完成一棟標準民居(約200m2)。該系統將于2016年投入市場,先期將在澳大利亞西部城市哈珀試建商用建筑。
3.2墻/地面施工機器人
眾所周知,瓷磚、大理石等墻/地面裝飾物的鋪貼作業需要耗費大量的人力和時間,而且由于手工操作精度所限,材料的鋪設精度與平整度很難保證,尤其是對于大型空間。目前,利用機器人技術實施自主或輔助人工進行瓷磚等的鋪設或吊裝作業,已成為建筑機器人領域重要的研發主題。
2014年,新加坡未來城市實驗室聯合ETH Zurich開發了一款名MRT(Mobile Robotic Triling)的地瓷磚鋪設機器人(如圖2所示)。該系統由一個可自主實施室內導航的移動機器人平臺和一具通用機器手組成,機械手末端配置有吸盤抓取裝置和混凝土噴口。兩套距離傳感器安裝于機械手末端,分別用于識別鄰近瓷磚邊際和確定作業空間結構,同時配合以自適應控制算法,保證瓷磚鋪設的精度。MRT體積小巧,不僅可用于大型公共空間作業,而且也適用于小型居室的鋪設工作。
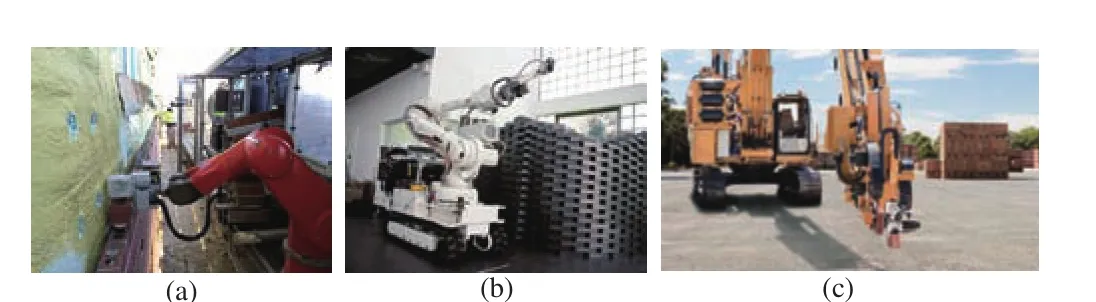
圖1 墻體砌筑機器人
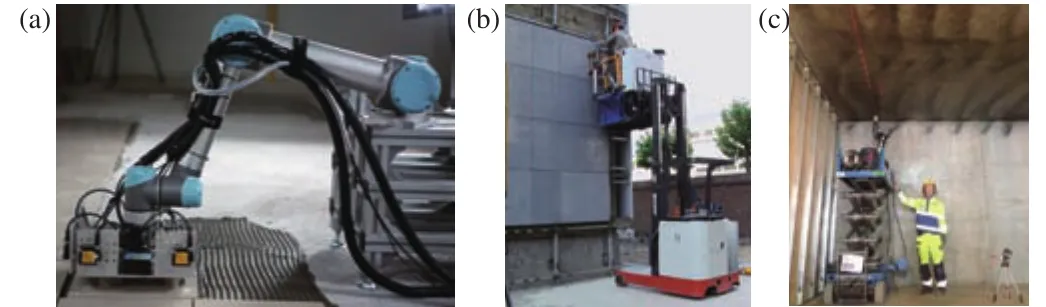
圖2 墻/地面施工機器人
在國內,河北工業大學、河北建工集團在863計劃的支持下,于2011年研發成功我國第一套面向建筑板材安裝的輔助操作機器人系統——C-ROBOT-I。該機器人系統面向大尺寸、大質量板材的干掛安裝作業,可滿足大型場館、樓宇、火車站與機場等裝飾用大理石壁板、玻璃幕墻、天花板等的安裝作業需求。C-ROBOT-I由搬運機械手、移動本體、升降臺和板材安裝機械手組成,采用超聲波、激光測距儀、雙軸傾角傳感器、結構光視覺傳感器等進行板材姿態檢測與調整控制,可保證板材安裝的精度和可靠性。C-ROBOT-I的最大承載能力約為2噸,滿載平移速度為8km/h,最大安裝高度達5m,最大可操作板材尺寸為1m×1.5m,可操作板材質量達70kg以上,安裝精度約0.1mm。采用該系統后,兩名工人便可完成大型板材的安裝,工作效率較傳統作業方式可提高約30倍。
除了裝飾物鋪貼,墻面很多其他作業也都適合機器人實施。例如,高層建筑外墻的粉刷、清潔等作業不僅耗時費力,而且極具危險性。2014年,韓國機械與材料研究院(KIMM)在開發出一款外墻施工機器人——WallBot。該機器人采用遙控方式工作,通過真空風扇吸附于墻面運動,目前已能完成墻體粉刷、平整和清潔等作業。另外,室內外管線安裝中的打孔作業同樣耗時費力,施工人員還要忍受粉塵和噪聲的侵害,并且手工打孔的質量極難保證。2015年,瑞典nLink公司推出了一款鉆孔機器人系統——Mobile Drilling Robot。該系統采用“移動平臺+升降臺+機械手”的結構,具有手動和自動兩種工作模式,通過專用App設置孔徑、孔深等參數,便可進行指定位置打孔;若載入待安裝線路系統(包括水、電、氣、空調等)的CAD/BIM數據后,MDR機器人便可自主完成打孔作業。目前MDR機器人已投入商業市場。
3.3清拆/清運作業機器人
在建筑物的營建準備、基坑挖掘及老舊建筑改造、拆除過程中,涉及大量的土石方清運、既有結構清拆工作。現有的清拆施工,主要依靠人工駕駛挖掘機等破拆設備進行,作業危險性極高,工作環境粉塵及噪聲污染嚴重,對施工人員的人身健康及生命安全構成了極大的威脅。這種粗放式的清拆作業,不但造成資源的極大浪費,使得大量混凝土材料被當作垃圾處理,而且后續的材料(如鋼筋)分離回收又會造成了人力的巨大消耗。為了解決這些問題,有關機構研發了清拆機器人,其作業方式包括兩種:一種是“沖擊破碎”,一種是“分離回收”。
采用沖擊破碎作業方式的清拆機器人大多基于有人駕駛清拆設備發展而來,主要改變在于利用遙操作技術替代原有人工駕駛系統。這種機器人化改造使得設備更為緊湊、體積更小,便于室內及狹小空間下的作業需求,廣泛應用于災難救援、房屋維修等領域。另外,遙操作技術使得操作人員遠離施工現場,安全性和工作舒適性大獲提高,可以大幅提高清拆效率。此類機器人系統目前各大工程機械制造商均有研發,瑞典Husqvarna公司的DXR-301型遙控清拆機器人(如圖3a所示)。
采取分離回收方式的清拆機器人系統直接將混凝土與鋼筋剝離,同時予以資源化回收。瑞典Umea大學提出的ERO機器人系統即基于這一思路提出(如圖3b所示)。ERO機器人由移動本體和機械臂組成,機械臂前段配備高壓射流噴射裝置破碎墻體,剝落的混凝土漿液被真空吸塵器收集并進行離心分離,其中的混凝土被打包收集,水進行循環再利用。ERO系統目前尚處于概念研究階段,但其所倡導的資源化、無污染清拆理念,代表了該方向未來的發展趨勢。值得一提的是,國內目前也有一些基于高速射流的破拆設備問世,但均未考慮對墻體材料進行資源化回收。
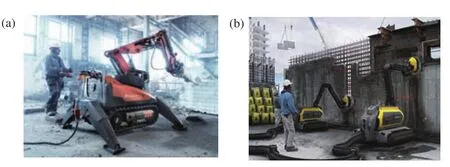
圖3 建筑物清拆機器人

圖4 土方清理機器人系統(日本小松公司)
利用機器人技術實現基坑填挖等大規模土方作業的自動化,是近年來工程機械領域一個重要的研究方向。目前,基于遙操作技術或無人駕駛技術,已實現了對于推土機、挖掘機等設備的機器人化改造。然而,論及自動化、智能化程度最高的場地土方清理系統,當屬日本工程機械巨頭小松株式會社所研發的“智能建設”(Smart Construction)系統(如圖4所示)。SC系統集成了小松公司所研發的無人駕駛挖掘機、推土機等工程設備,動用四旋翼無人機作為“眼睛”監控施工進度及設備狀態,進而達成空-地及地面各設備間的有效協同。SC系統利用無人機配備的3D激光掃描設備,實時繪制施工場地3D模型,進而指導施工規劃;通過實時檢測土方量變化,動態調整各設備任務。該系統自主化程度頗高,尤其是無人機的引入,成功解決了大面積清場作業信息獲取不及時的問題,使得多機之間的在線動態規劃與協同成為可能。這種技術集成思路值得其他系統借鑒和推廣。
3.43D打印建筑機器人
提及3D打印即增材制造技術,一般被認為是現代技術,但嚴格來講,建筑物營建過程本身便具有鮮明的“增材”屬性,其可能是人類最早的3D打印實踐。將現代3D打印技術應用于建筑行業,當首推美國南加州大學Khoshnevis教授于20世紀90年代提出的“輪廓工藝”(Contour Crafting)技術。CC技術的基本原理與其他普通3D打印機無異,通過擠出設備將材料在指定位置逐層堆砌,差別僅在于CC的打印材料是高密度、高性能混凝土。CC的整體結構類似于大型的龍門吊車,整個打印機橫跨于建筑物之上,通過軌道移動控制噴嘴的X-Y軸向位置,伸縮臂控制噴嘴的Z軸位置,最終實現精確的打印定位。在建造過程中,外墻及地面等混凝土結構可直接打印完成,配合以其他抓取設備及特殊裝置,該3D打印機也可完成地面及墻面瓷磚鋪設,并安裝水、氣、熱、電等管線。隨后,僅需人工安裝窗戶、門以及裝飾等即可完工。該技術可在20小時內建造一座240m2的房屋,采用的空心墻體可節省25%~30%的材料和45%~55%的人工。另外,CC技術使得建筑物的構形更為靈活,墻體可以置空,形狀不再受直線局限,可自由打印各種曲線及異形結構來提升建筑物的美觀度和空間利用率。
龍門吊車式CC系統所能打印的建筑尺度,受到龍門吊車跨度的限制。隨著待打印建筑尺度的增大,吊車機構的制造、安裝和運輸難度將隨之增加,整個系統的可移動性變差,造價亦隨之提高。為了能夠實施更大尺度構筑物的打印,提高CC系統的便攜性同時降低制造成本,Ohio大學的Paul Bosscher提出了基于懸索牽引的CC系統,即通過電機牽引多條懸索控制打印吊艙運動(如圖5所示)。該吊索系統采用全約束懸索結構,以實現打印吊艙的精確移動并控制噴口方向。但由于大跨度懸索的柔性特性,系統的剛性很難保持,故懸索牽引CC系統的控制難度要高于龍門吊車結構。值得特別提及的是,CC技術目前已得到NASA的資助,用以研究未來可用于月球基地等地外建筑物建造的3D打印設備。
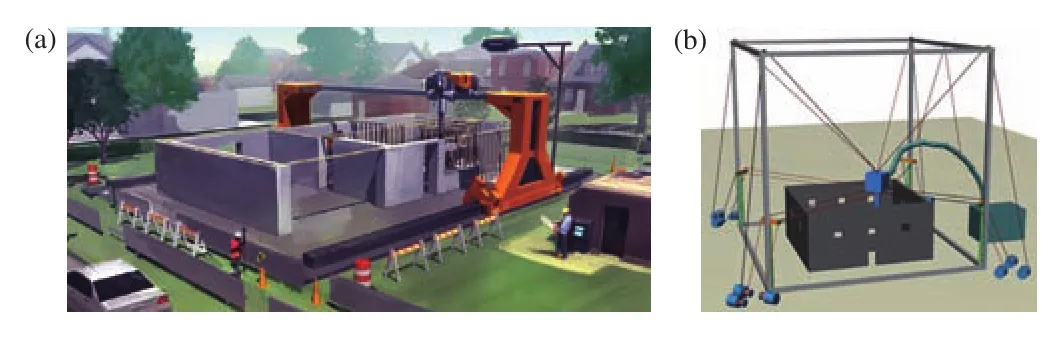
圖5 “輪廓工藝”3D打印建筑機器人系統
無論采用龍門結構還是多懸索牽引結構,CC系統最大的問題在于建筑本體尺寸受到打印機大小的限制,故只適用于小型建筑或大型建筑局部結構的作業。為了能夠打印更大的建筑,研究者提出了3D打印設備附著于既有建筑物之上的方案,其中以西班牙加泰羅尼亞先進建筑研究所(IAAC)提出的MiniBuilders系統最具代表性(如圖6所示)。MiniBuilders系統包括Base、Grip和Vacuum三套3D打印機器人,分別用于地基、墻體和墻面的打印作業。三者通過中央計算機協調彼此運作,并結合自身傳感器和定位數據按順序獨立執行任務。首先,利用Base機器人實施地基打印,完成后由Grip機器人附著于墻體頂端打印墻體,最后由Vacuum機器人(配備真空吸盤)附著于墻面實施平整作業。這一作業特性賦予了MiniBuilders系統極大的施工靈活性,理論上通過多機協作,該系統能夠打印任意尺度的建筑物。
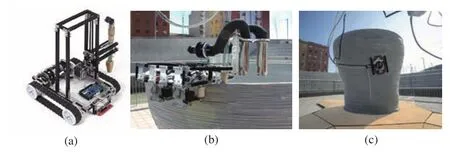
圖6 3D打印建筑機器人系統MiniBuilders
與其他建筑機器人主要關注特定施工工序相比,3D打印建筑機器人的最大優勢在于可直接實現整棟建筑營建施工。CC系統和MiniBuilders的基本原理相似,但卻代表了兩種全然不同的實施思路。CC的外支撐系統適用于小型建筑物營建,而可附著于既有建筑的3D打印系統作業空間靈活,可實施任意尺寸的營建施工,若配合以多機協同施工,應用領域將更為廣泛。兩種系統適用于不同場合,后續研究中可考慮將兩種方式相互結合,進一步擴展3D打印建筑機器人的適用范圍。
3.5可穿戴輔助施工機器人系統
人體外骨骼機器人(Wearable Robotic Exoskeleton)是一類通過精密機械裝置協助人體完成動作的裝置(同步、加強、模仿),它結合了外骨骼仿生技術和信息控制技術,涉及生物運動學、機器人學、信息科學、人工智能等跨科學知識。目前,外骨骼機器人系統主要應用于醫療(助殘、康復)和軍事(增強負重、助力)領域,下一步自然是延伸至工業應用,包括工程施工、緊急救助(疾病、事故、災害、突發事件)、生產制造、搬運輸送、危險工作(如核電站操作維護、航天空間站、深水作業)等領域,用以減少工傷事故,提升工作效率。
在建筑施工領域,外骨骼機器人尚處于概念提出和原型機開發階段。典型系統有MIT的d'Arbeloff實驗室開發的SRA和SRL(Supernumerary Robotic Arms/Limbs)(如圖7所示)。SRL系統主要用于高空作業人員安全防護,同時為鉆孔等作業提供助力支持并穩定其工作位姿。SRL通過背帶固定于工作人員腰部,主體包括兩個三自由度機械臂,可實現上下、左右及前后運動,目前通過平板電腦進行遙控操作。SRA系統采用背囊式結構,主體包括兩個6自由度機械臂和一套佩戴于工作人腕部的傳感器系統,主要功能在于輔助施工人員托舉、穩定重物,以便雙手可以進行更為精細和輔助的安裝作業。SRA最為顯著的特點在于能夠識別人員行為意圖,自主決定何時、何地給予施工幫助,極大方便了工作人員的操所難度。

圖7 施工用外骨骼助力機器人
在今后相當長一段時間內,建筑施工還不能完全由機器人替代,加之建筑業本身所具有的危險、繁重的自然屬性,為了提升人員的施工效率并減少安全事故,今后在工程施工中引入外骨骼機器人,將是必然之舉,其應用潛力非常巨大。不過,鑒于外骨骼機器人系統涉及復雜的“人體-機電-信息-控制”多學科交叉,尤其是受制于人員運動意圖判斷、能源供給、控制策略等技術因素制約,這些系統要真正投入應用,尚需時日。
3.6飛行建造機器人系統
近年來隨著無人飛行器技術走向成熟,催生了利用四旋翼飛行器實施建筑物營建的新潮構想。飛行平臺可以在3D空間自由移動,能夠克服陸基系統對于腳手架等輔助設備的依賴,具有可擴展性好、作業空間不受限制等優勢。同時,飛行營建可實現建筑物設計與營建全過程的數字化整合和信息化監督。因此,飛行營建特別適用于特殊非標準結構的營建作業。
飛行營建的概念由ETH Zurich的建筑與數字建造專家Gramazio & Kohler聯合該校機器人專家Raffaello D'Andrea一同提出。2012年,他們實施了一個名為“飛行裝配建筑”(Flight Assembled Architecture)的實驗項目,利用多臺四旋翼無人機搭建了一個高約6m、包含1500塊泡沫塊的大尺度曲線形構筑物(如圖8a所示)。營建實驗在一個配備運動捕捉系統的實驗室進行,整個系統采用集中式控制體系,由一臺中央計算機負責無人機運動數據采集、算法運算和運動指令發送,使無人機能夠自主完成抓取、運送、定位、放置及充電等作業。該工作主要出于概念展示目的,其成功實施驗證了飛行器平臺實施結構體營建的可行性,并產生了強烈的社會反響。
為了進一步展示飛行器營建不受空間限制的獨特優勢,Gramazio & Kohler還開展了柔性懸索結構的無人機搭建實驗(如圖8b所示),這類結構可用于野外的臨時性通過或牽引結構。柔性繩索結構的基本構成元素包括“結點”(node)和“鏈接”(link),結點兼具固定和牽拉作用,結構相對復雜且類型很豐富,如半轉結、圓轉節、圓節等。根據其類型不同,需無人機牽引繩索實施繞飛、穿梭、雙機配合等機動飛行,而如何將不同結點映射為無人機的有效飛行軌跡,便成為解決此類搭建最為關鍵的問題。另外,由于無人機需攜帶重物并牽拉繩索,故其控制需同時考慮牽引力和空間位置,這對無人機的運動規劃、飛行控制及多機協同均提出了極高的要求。
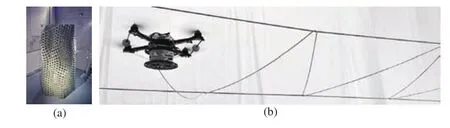
圖8 飛行營建
以上兩項工作均采用集中式協調策略控制多臺無人機運動,與此不同,賓夕法尼亞大學的Lindsey & Kumar基于分布式協同技術,開展了多臺四旋翼無人機搭建三維立體框架結構的研究,使得各無人機在不獲取結構體全局信息的情況下便可完成預設結構搭建,極大地降低了無人機系統的控制復雜度。此外,ARCAS項目關注于利用裝配在直升機上的機械臂進行裝配作業。
與常規的陸基建筑機器人相比,空基營建作業的最大優勢在于飛行器運動空間不受限制、通用性好、可擴展能力強,這有助于在數字化建筑物設計方案與自動化營建之間建立更為直接的聯系,提高施工作業的靈活性,后繼發展潛力很大。不過就當前而言,受制于無人飛行器承載能力、建筑任務分解與規劃、大載荷下的飛行穩定性、多機協同控制等技術因素的局限,飛行營建技術還處于非常初級的概念研究階段,該技術要真正投入實用還為時尚早。
3.7建筑物機器人化營建框架
前文所述建筑機器人技術大都針對某一單項任務,其中多數系統的研發目的僅在于對現有手工作業的替代,整個營建模式依然遵循經典模式。事實上,為了最大限度發揮建筑機器人的優勢,既有的建筑結構及營建模式必須發生適應性改變。這便涉及到如何利用機器人開展更為有效的營建作業這一基礎性問題。
2015年,英國政府資助了一項名為“針對建筑環境的柔性機器人裝配模塊”(FRAMBE)的新一代建筑機器人研究計劃。該項目由工程機械巨頭Skanska UK領銜,聯合了ABB Robotics(機器人)、Dekla UK(軟件)、Exelin(咨詢)、The UKs Building Research Establishment(建筑設計)、Reading大學等多家機構,旨在從整體實施思路出發,“建立將機器人技術引入建筑施工的整體框架并進行演示”。FRAMBE的大致思路是基于模塊化思想,建筑物整體采用模塊化結構,利用機器人進行預置模塊的就近制造,現場采取機器人裝配。該項目目前尚未發布研究結果,其最終成果值得期待。
另外一項值得關注的項目便是Google公司位于山景城的新辦公大樓的建造(如圖9所示)。據報道,Google計劃研發一款(套)名為Carbot的機器人來施建造整棟建筑。該建筑將采用模塊化結構,包括墻體、立柱、地板等基本構件,可通過對相關模塊的拆解與重組改變室內空間布局,以針對不同的空間使用需求。這種“可變形空間”的思想將極大地簡化室內改造的成本和難道。Google的這一項目極具想象力,然而到目前為止尚未見其發布詳細技術報告。
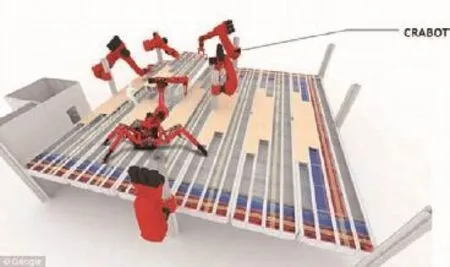
圖9 Google新總部建造設想圖
毫無疑問,隨著機器人技術越來越多地應用于建筑施工作業,勢必導致建筑物本身及其營建模式的巨大改變。因此,在目前主要著眼于工序替代的建筑機器人研究之外,急需開展更為廣義和具有指導性、方針性的機器人化施工框架研究,以使建筑物-機器人相互適應,達到真正自主、智能、高效營建的目的。目前來看,建筑本體及施工作業的模塊化,是一條較為可行的途徑。
3.8其他建筑機器人系統
建筑機器人的涉及面非常廣泛,除前文所列舉的幾大類,還有其他一些與建筑施工作業密切相關的系統。例如,混凝土建筑中需要對鋼筋/鋼絲等線材進行箍扎作業,該工作耗時費力,近來出現了基于通用機械手的線材編制機器人。基坑四壁、隧道和礦坑內壁的混凝土噴漿加固作業,目前已有投入應用的噴漿機器人系統,極大地提高了噴漿效率和噴施均勻度;在大型鋼構結構施工中,已有專用的焊接機器人參與部件高精度對接作業,北京奧運場館“鳥巢”和“中國第一高樓”上海中心的鋼結構施工中均用到了建筑焊接機器人(如圖10所示);基于SLAM與無人機技術的建筑物三維重建,在建筑物的勘察、保護等方面亦極具應用前景;目前用于建筑物消防、管線清理的機器人系統,更是不勝枚舉。

圖10 其他建筑機器人
總而言之,機器人技術可應用于建筑物營建過程的方方面面,只要需求明確,均可有針對性地研發相應的機器人系統。鑒于建筑施工的業態類型極為豐富,其中很多作業過程目前尚未見機器人技術涉足,這些空白還有待填補。
4 發展措施與建議
通過前文的研究現狀可以看出,建筑機器人的研發具有鮮明的“應用導向”特色,其發展依賴于兩方面的因素:一是相關通用機器人技術的進步;二是對建筑行業施工需求的準確提煉。與之相對應,開展建筑機器人研究需立足于這兩個方面,即在明確建筑施工所面臨技術難題和從業者實際需求的基礎上,通過對現有機器人技術的集成、改造和創新,實現建筑機器人技術的發展與進階。
針對我國建筑機器發展欠佳的現狀,遵循由難到易、循序漸進的思路,提出以下幾方面發展措施或建議:
(1)加速傳統建筑設備的機器人化改造
對現有的建筑施工設備進行機器人化改造,是發展建筑機器人技術并使其快速投入應用的一條捷徑。例如,對于建筑用工程施工車輛,如挖掘機、推土機、壓路機、渣土車等,可基于遙操作、自主導航與避障、路徑規劃與運動控制、智能環境感知、無人駕駛等技術對其進行改造,實現相關車輛操作的遙控化、半自主化,甚至完全自主化,減少操作人員的工作負擔、優化工作環境、提升作業安全性和效率,推進施工作業的標準化和精細化。參照這一模式,亦可考慮對塔吊、起重機等提舉系統進行遙操作改造,通過遠程遙控操作徹底解除施工人員的安全威脅。
(2)促進即有機器人技術在建筑業中的應用
目前研發的很大機器人技術均屬于通用技術,它們在建筑業中具有廣闊的應用前景。例如,在環境感知與建模方面,可利用無人飛行器(UAV)、輪式/履帶機器人等移動平臺搭載激光雷達、結構光攝像頭、3D視覺等環境感知設備,基于多源信息融合、同時定位與地圖創建(SLAM)等環境建模技術,實現建筑物內外結構及周邊環境的自主測繪與3D建模;利用UAV并配合SLAM技術,實現土方開挖、廢料清運及結構物施工進度及工程量的實時監測,為大尺度施工作業中多設備任務優化與協調提供鋪墊。再如,基于機械手、移動機器人底盤搭建的通用移動操作平臺,有望替代人工完成諸如砌筑、抹灰、平整、拋光、編織、鋪貼、鉆孔等很多操作。
(3)大力推動建筑業專用機器人系統研發
毋庸置疑,建筑業有其獨有的特殊性,故通用技術不可能解決所有問題。為了能夠更好地實施營建,根據建筑業之特性研發專用建筑機器人,是極其必要的。例如,3D打印建筑機器人的突出代表“輪廓工藝”技術,針對房屋施工的各種特殊需求,進行了有效的針對設計,最終才成就了該系統直接打印包括水電管線在內的完整房屋的能力。噴漿機器人、ERO混凝土回收機器人等,均是針對建筑業的特殊需要定制研發的。這一方面的工作,后續要進一步加大力度。
(4)促進可穿戴輔助施工機器人研究
短期之內,建筑機器人尚不能完全替代工人施工。因此,未來對于具有防護、增效作用的外骨骼機器人系統的需求會非常旺盛。這類系統的結構設計可參考軍用外骨骼機器人進行,功能方面則依賴于具體的應用場景。特別是營建施工中大量存在的合作實施工序,需要機器人系統主動予以配合,此時對于人員動作意圖的識別并合理施助,是一個較難解決的問題。
(5)協同推進適應于機器化施工的新型建筑結構及建材研究
為了充分發揮建筑機器人的優勢,傳統的建筑形式與施工模態必然要作出相應的改變。目前來看較為可行的途徑是采用模塊化結構,利用機器人進行模塊的預制、組裝,這將大幅減小機器人的作業難度,同時可有效提高新建筑的營建速度。另外,新型建材的研發也要同步推進。例如,3D打印建筑機器人對于混凝土的流動性、凝固速度等有很高的要求;實施飛行營建則要求各模塊間具有主動結合的能力。
(6)探索特殊環境下的建筑機器人施工技術
以月球/火星基地、核輻射區蔽掩、水下設施等為代表的特殊建筑物,施工風險極高甚至人員不可達,故只能依賴于建筑機器人進行營建。例如,歐空局正在研發基于3D打印技術的月球基地施工機器人;而NASA也資助了“輪廓工藝”的研發,正在為未來的火星基地建設做準備。通過發展建筑機器人技術,未來包括切爾諾貝利核電站、福島核電站等的隔離設施的建造難題將迎刃而解。
5 結語
建筑機器人作為一個具有極大發展潛力的新興技術,有望實現“更安全、更高效、更綠色、更智能”的信息化營建,整個建筑業或借機完成跨越式發展。建筑業在我國屬于支柱產業,2015年其總產值達18.08萬億元,占到GDP近27%的份額,從業者近5000萬,這一龐大的內需市場為我國建筑機器人的發展壯大提供強有力的保障。在十三五規劃中,明確支持將大力發展機器人技術,這一方針對建筑機器人的開發應用產生極為深遠的影響。十數年來,我國在工業機器人、特種機器人以及機器人通用技術方面已經積累了較多的經驗,并儲備了大量人才,加之國家大力倡導創新的利好局勢,建筑機器人未來在我國必將取得長足的發展。
[1] 吳良鏞. 廣義建筑學[B]. 北京: 清華大學出版社, 2011.
[2] Nathan Podkaminer. The Need for Technology in the Construction Industry[DB/OL]. http://www.masonrymagazine.com/december - 2015 -masonry - technology/, 2015 - 12/2016 - 7.
[3] Patrick J. Kiger. Robots Are Rare in the Construction Industry, but That Could Soon Change[DB/OL]. http://now.howstuffworks.com/2016/01/05/robots - rare - in - construction - industry, 2016 - 1 - 6/2016 - 7.
[4] Scott Peters. Technology Advances of Robotics in Masonry[DB/OL]. http:// www.masonrymagazine.com/october - 2015 - masonry - technology/, 2015 -10/2016 – 7.
[5] Behrokh Khoshnevisk. Houses of the Future: Construction by Contour Crafting Building Houses for Everyone[Z]. Urban Initiative Policy Brief, 2014. 8. [6] FASTBRICK ROBOTICS Building a revolution [DB/OL]. www.asx.com.au/ asxpdf/20150624/pdf/42zcrnj7yq2by9. pdf, 2015 - 6 - 24/2016 - 7.
[7] Willmann J, Augugliaro F, Cadalbert T, et al. Aerial Robotic Construction Towards a New Field of Architectural Research[J]. International Journal of Architectural Computing, 2012, 10(3): 439 - 459.
[8] Augugliaro F, Mirjan A, Gramazio F, et al. Building tensile structures with flying machines[C]. 2013 IEEE/RSJ International Conference Intelligent Robots and Systems, 2013.
[9] Helm V, Ercan S, Gramazio F, et al. Mobile robotic fabrication on construction sites: DimRob[C]. 2012 IEEE/RSJ International Conference Intelligent Robots and Systems, 2012.
[10] Steve Doohan. Meet the robot bricklayer 20 times faster than a human and which never needs a tea break[DB/OL]. http://www.mirror.co.uk/news/weird -news/meet-robot-bricklayer - 20 - times - 6709333, 2015 - 10 - 26/2016 - 7.
[11] Robotic Tiling Demonstrator[DB/OL]. http://www.fcl.ethz.ch/project/ robotic - tiling - demonstrator/.
[12] nLink's mobile drilling robot[DB/OL]. http://www.nlink.no/drilling - robot.html.
[13] Adele Peters. This Concrete - Eating Robot Can Recycle An Entire Building On The Spot[DB/OL]. http://www.fastcoexist.com/3028697/this - concrete - eating -robot - can - recycle - an - entire - building - on - the - spot, 2014 – 4 - 16/ 2016 - 7.
[14] Christina Urban. Komatsu Looks to Drones & Robots for Labor Shortage Relief [DB/OL]. http://zbrella.com/komatsu - looks - to - drones - robots - for -labor - shortage - relief/, 2015 - 11/ 2016 - 7.
[15] Khoshnevis B. Automated construction by contour crafting: related robots and information technologies[J]. Automation in Construction, 2004, 13(1): 5 - 19.
[16] Bosscher P, Williams R L, Bryson L S, et al. Cable - suspended robotic contour crafting system[J]. Automation in Construction, 2007, 17(1): 45 - 55.
[17] MiniBuilders[DB/OL]. http://robots.iaac.net/.
[18] Parietti F, Asada H H. Supernumerary Robotic Limbs for Human Body Support[J]. IEEE Transactions on Robotics, 2016, 32(2): 301 - 311.
[19] Lindsey Q, Mellinger D, Kumar V, et al. Construction with quadrotor teams[J]. Autonomous Robots, 2012, 33(3): 323 - 336.
[20] Abigail Phillips. Skanska leads the global construction industry in on - and -off - site robotics[DB/OL]. http://www.constructionglobal.com/equipmentit/480/ Skanska - leads - the - global - construction - industry - in - on - and - off - site -robotics, 2015 - 7 - 14/ 2016 - 7.
[21] Sarah Griffiths. Google HQ could be built using ROBOTS... if it ever gets planning permission: LinkedIn is awarded lion's share of Bayshore plot[DB/OL]. http://www.dailymail.co.uk/sciencetech/article - 3072085/Google - HQ - built -using - ROBOTS - gets - planning - permission - LinkedIn - awarded - lion - s -share - Bayshore - plot.html, 2015 - 5 - 7/ 2016 - 7.
[22] Robotically fabricated carbon and glass fibre pavilion by ICD + ITKE [DB/ OL]. http://www.designboom.com/architecture/robotically - fabricated - carbon -and - glass - fibre - pavilion - by - icd - itke/, 2013 -3 - 5 / 2016 - 7.
于軍琪(1969-),男,博士,西安建筑科技大學教授、博士生導師,西安建筑科技大學研究生院副院長,智能建筑學科負責人,國家公派英國雷丁大學訪問學者。擔任全國高等學校建筑電氣與智能化學科專業指導委員會副主任、陜西省土木建筑學會智能建筑專委會副主任等職務。長期從事建筑電氣與智能化、建筑機器人等科研與教學工作。
曹建福(1963-),男,陜西寶雞人,博士,西安交通大學電信學院教授、博士生導師,中國自動化學會理事,陜西省自動化學會副理事長兼秘書長。研究方向包括先進機器人控制、工業系統故障診斷與非線性系統理論等。
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
建材發展導向(2021年9期)2021-07-16 07:11:36
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
少兒科學周刊·兒童版(2015年6期)2015-11-24 03:49:38
西安建筑科技大學學報(自然科學版)(2014年2期)2014-11-12 13:04:54
