基于SIFT圖像拼接算法在鋼軌三維形貌測量的應用
2016-11-22 12:09:13何威威王澤勇李金龍羅林
環球市場信息導報 2016年18期
◎何威威 王澤勇 李金龍 羅林
基于SIFT圖像拼接算法在鋼軌三維形貌測量的應用
◎何威威 王澤勇 李金龍 羅林
鋼軌三維形貌測量對行車安全有重要的意義,而鐵路運營的里程越來越長,為了更準確、高效地復原和測量鋼軌的三維形貌,需要對測量圖像進行拼接。本文對Harris、SUSAN和SIFT三種圖像拼接算法進行了仿真分析和比較,對這三種方法的拼接效果做了評價,仿真結果表明SIFT算法的拼接效果最佳。本文將SIFT算法與FTP相結合,應用于鋼軌的三維形貌測量,將拼接后的圖像進行FTP復原,得到很好的鋼軌三維復原相貌。
隨著鐵路向重載化和高速化發展,鋼軌的磨耗愈加嚴重,這將會使得火車在運行中發生搖擺和振動,影響旅客舒適度,嚴重時可能出現脫軌及側翻事故,帶來嚴重的安全隱患,因此需要及時對鋼軌的磨耗量進行測量。
對鋼軌磨耗的測量,有接觸式和非接觸式兩種,接觸式測量在20世紀70年代有應用,缺點是需要與鋼軌進行接觸,設備本身也會有損耗,不能完整地復原鋼軌原貌,而近年來出現了非接觸式的鋼軌三維形貌測量的技術,其中FTP(傅里葉變換輪廓 術:Fourier Transform Profilmetry)是鋼軌三維形貌測量最有效的方法之一。FTP只需一幀變形條紋圖像即可實現物體的三維形貌測量,因此具有復原速度快,精度高等優點。然而鑒于每一幀圖像的視場范圍有限,對于長距離的鋼軌復原,需要采用圖像拼接技術來實現。SIFT(尺度不變特征變換:Scale Invariant Feature Transform)是一種較好的方法,在縮放、旋轉的情況下,能很好地完成拼接。
基本原理
FTP原理
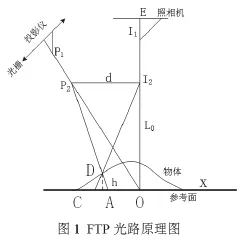
FTP光路原理圖如圖1所示,P1和P2分別為投影系統的入瞳與出瞳,I1和I2分別為照相系統的出瞳與入瞳,d為P2與I2間的距離,L0是從I2到參考平面之間的距離,A和C是參考面上的兩點,D是物體表面的點,光柵垂直于圖平面。
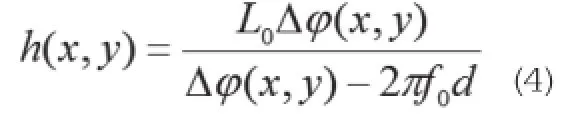
用正弦光柵投影到被測物體表面,得到變形結構光場的表達式為:

其中,a(x,y)為背景光場,b(x,y)是條紋對比度,φ(x,y)是經過物體之后產生的相位,f0投影光柵的基頻。對條紋進行傅里葉變換得到其頻譜分布,在x方向上一維傅里葉頻譜表示為:


根據投影關系,就可以得到:
SIFT算法拼接原理
二維高斯函數

圖像I(x, y)在不一樣的尺度下和高斯函數進行卷積,得

其中σ是空間尺度因子,因子越小,則圖像被平滑得越少,反之則越多,L(x,y,σ)表示圖像的尺度空間。
經過SIFT算法進行特征匹配,找到不受圖像縮放、旋轉影響的特征點,用RANSAC算法進行特征點提純,使得圖像的特征點匹配更加精確,加權算法的數據融合,讓兩幅圖像融合成為一幅圖像。
仿真與分析
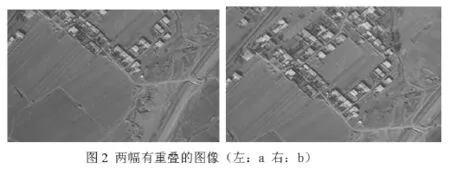
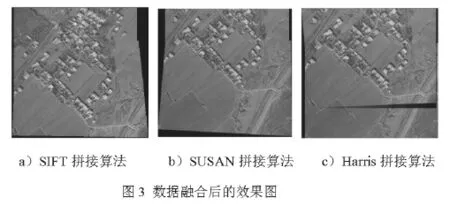
對如圖2所示的兩幅有重疊的圖像,分別采用SIFT,SUSAN及Harris三種拼接方法進行拼接,并用RANSAC進行特征點提純及加權算法進行圖像融合,結果如圖3所示。
對上述的圖像進行評價比較,如表1所示:
從表1可見, Harris和SUSAN拼接算法使用的時間較少,但SIFT能夠匹配的數目較多,準確率也比較高,顯然找到拼接位置的點的概率也會較高;從平均梯度來看,數值大說明SIFT算法拼接的圖像對于微小細節反差的表達能力較好;從熵的角度看,SIFT拼接算法在三種處于中等。而從圖3實際的拼接效果看,Harris拼接算法較差,而從表1分析,SUSAN拼接算法微小細節反差的表達能力又沒SIFT拼接算法好。綜上所述,選擇SIFT算法性能較佳。
在鋼軌三維形貌測量中的應用
對上述的圖像進行客觀的評價,如表2:

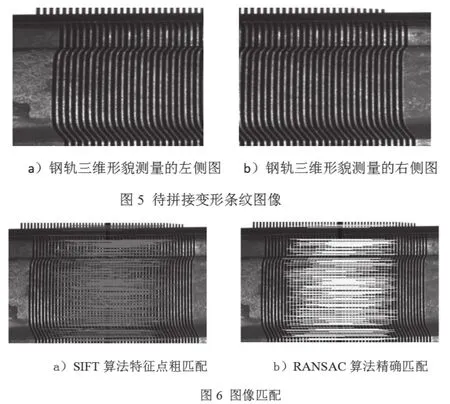



從表2可以看出,對鋼軌三維形貌測量圖像用SIFT算法進行粗匹配和RANSAC算法進行精確匹配后,兩幅圖(圖5)匹配經歷的時間為340.701853s,粗匹配的特征點有927個(圖6),精確匹配的特征點有840個(圖7)。拼接及圖像融合后的圖像如圖7,平均梯度的數值比較大,說明SIFT拼接算法對微小細節反差的表達能力好,而熵的數值比較小,說明圖像質量離散程度不高,因此SIFT拼接算法比較適合用在鋼軌三維形貌測量。
采用FTP方法,對拼接圖像進行三維重建,其復原圖如圖8所示:
從復原來看,邊緣還有些瑕疵,表面看起來復原得比較好。從復原來看,盡管邊緣有些誤差,但整體復原得較好。系統經過標定后即可獲取鋼軌三維形貌尺寸,與標準鋼軌對比后即可獲取磨耗量。理論和實踐證明FTP方法的測量精度可達0.1mm以上。
通過仿真比較和分析,使用SIFT算法對變形條紋進行拼接,質量較好,同時將該方法應用于鋼軌三維形貌測量,將兩幅鋼軌三維形貌變形條紋圖像拼接和數據融合后,用FTP方法得到較好的鋼軌三維形貌復原。實踐證明,該方法用于鋼軌表面磨耗測量是可行的,為鋼軌三維形貌測量提供一種良好的方法借鑒。
(作者單位:西南交通大學物理科學與技術學院光電工程研究所)
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
