基于PLC的高空作業車自動調平控制系統
2016-11-24 02:56:00趙志華劉玉敏姚建紅
化工自動化及儀表 2016年8期
趙志華 劉玉敏 姚建紅
(東北石油大學電氣信息工程學院,黑龍江 大慶 163318)
基于PLC的高空作業車自動調平控制系統
趙志華 劉玉敏 姚建紅
(東北石油大學電氣信息工程學院,黑龍江 大慶 163318)
以S7-200 PLC為主控器件,設計了一種高空作業車自動調平控制系統。給出系統的結構、工作原理、硬件組成、控制程序流程與梯形圖。仿真結果表明:該系統實現了高空作業車自動調平、上升桿位移控制和作業平臺上升速度控制的功能;作業平臺水平傾角可消除水平誤差,實現自動控制調平。
自動調平控制系統 高空作業車 PLC 上升桿位移控制 上升速度控制
高空作業車是用來運送工作人員和工作裝備到指定高度進行作業的特種車輛,是將高空作業裝置安裝在汽車底盤上組成的,現廣泛應用于船舶、建筑、消防及港口貨運等行業中[1]。隨著城市化進程的加快,城市電力、市政建設及裝飾物等各種養護作業需要大量的高空作業裝備,利用高空作業車可以大幅提高工作效率,所以高空作業平臺有著廣闊的發展前景。隨著高空作業領域的不斷擴展,對高空作業平臺的操作平順程度、工作穩定性、自動調速效果及安全可靠性等方面的要求也越來越高[2]。為此,筆者基于PLC設計了一套高空作業車自動調平控制系統,以實現高空作業車自動調平、上升桿位移控制和作業平臺上升速度控制的功能,提高高空作業車的操作穩定性與可靠性。
1 系統的結構與工作原理
高空作業車自動調平控制系統(圖1)采用閉環恒值控制。高空作業車的作業平臺為被控對象,作業平臺的水平傾斜角是被控量。比較元件和反饋元件為雙軸傾角傳感器,用于檢測作業平臺X軸(縱向)和Y軸(橫向)的水平狀態。支承作業平臺的5個液壓缸是執行機構,高空作業平臺有5條支腿,分別用5個執行元件控制其高度,以調整平臺的水平度,保證平臺的穩定性。控制元件由安裝在液壓控制回路上的與支承作業平臺液壓缸相連的5個電磁閥組成。
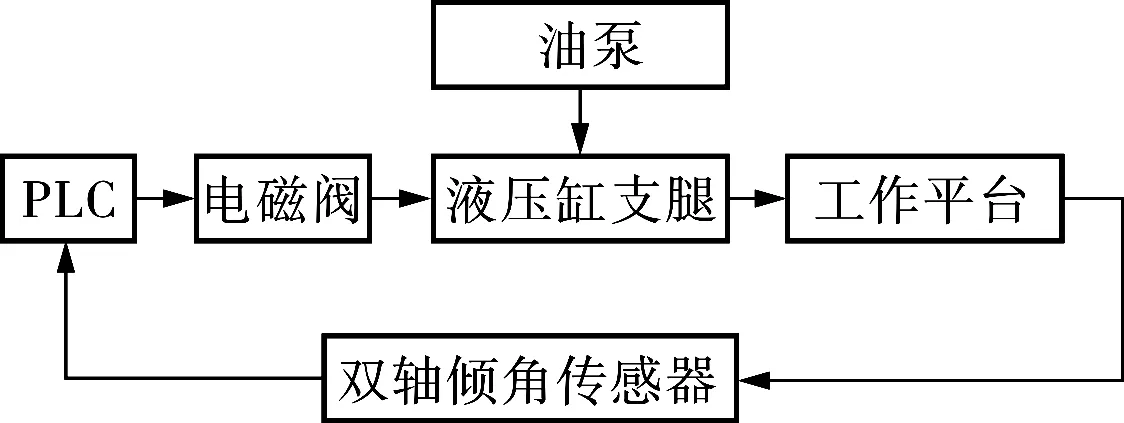
圖1 高空作業車自動調平控制系統結構框圖
高空作業車自動調平控制系統的工作原理如圖2所示。當系統進入自動調平程序后[3],雙軸傾角傳感器分別檢測作業平臺x軸和y軸方向的水平狀態,并將檢測信號傳回PLC,然后將該信號與PLC中的給定值進行比較,當誤差值超出允許值后,就會產生一個電信號,經放大電路傳給PLC,PLC根據預先設定的調平程序輸出控制信號,傳給控制5個柱塞式支承油缸動作的電磁閥,閥相應地開啟或關閉,支承油缸就會在油泵液壓動力或車身重力的作用下,產生向上或向下的位移量,從而帶動作業平臺水平傾斜角向著相反的方向改變,實現自動消除水平誤差的目的[4]。當誤差信號達到指定的誤差范圍時,PLC發出停止命令。經過雙軸傾角傳感器的多次檢測和PLC的控制調節,最終達到高空作業車車身自動調平的目的,且調平結束后保持此平衡穩定的狀態。

圖2 高空作業車自動調平控制系統的工作原理
2 系統硬件部分
高空作業車自動調平控制系統的硬件部分主要由S7-200 PLC、調平支腿、開始按鈕、停止按鈕、撤回按鈕、位置開關、電磁閥及雙軸傾角傳感器等組成。
依據PLC型號和I/O分配表設計的系統外部接線[5]如圖3所示,共有11個輸入(啟動、停止、撤回、各支腿的輸入開關以及傳感器的x軸和y軸模擬信號輸入)和8個輸出(各支腿上的電磁閥所對應的下降和撤回繼電器)。

圖3 高空作業車自動調平控制系統外部接線
3 系統軟件部分
3.1系統程序流程
高空作業車自動調平工作流程如圖4所示。先讀入前、后腿傾斜角的值,若不符合精度要求則判斷前、后腿的高低并通過電磁閥來進行調平,直到達到系統精度要求再繼續執行其他程序;若x軸符合精度要求則繼續讀入左、右傾斜角值(即y軸方向上的傾斜角值)[6];若不符合精度要求則判斷左、右支腿的高低并通過電磁閥對低支腿升高調平,直到達到系統要求再繼續執行其他程序;若y軸方向的值符合精度要求則結束自動調平程序。

圖4 高空作業車自動調平工作流程
圖5為高空作業車位移控制流程,通過對高空作業車的一段、二段杠進行位移高度控制,保證高空作業車的作業平臺與地面高度保持安全位置,實現位移的自動控制[7]。圖6為高空作業車平臺上升速度控制流程,通過對作業平臺上升速度的控制可以有效避免速度不穩定帶來的安全隱患。

圖5 高空作業車位移控制流程

圖6 高空作業車平臺上升速度控制流程
3.2控制系統梯形圖
3.2.1高空作業車調平系統總控制
高空作業車調平系統總控制梯形圖如圖7所示。點擊I0.0開始運行高空作業車調平系統,Q0.0~Q0.3分別代表作業車的前、后、左、右支腿,控制系統接通后4個支腿上電,且亮燈顯示。當系統出現緊急狀況時,可點擊I0.1按鈕對系統進行停止送電,保證系統操作的安全性。M0.0表示控制系統自鎖保護。

圖7 高空作業車調平系統總控制梯形圖
3.2.2高空作業車一、二段杠位移控制
高空作業車一段杠位移控制梯形圖如圖8所示。點擊I0.7啟動開關,一段位移控制開始,通過T37計時控制臂桿上升的位移高度,點擊I1.0停止上升,此時Q0.5得電表示一段臂桿上升位移控制結束。

圖8 高空作業車一段杠位移控制梯形圖
高空作業車二段杠位移控制梯形圖如圖9所示。點擊I1.1啟動開關,二段位移控制開始,通過T38計時控制臂桿上升的位移高度,點擊I1.2停止上升,此時Q0.6得電表示二段臂桿上升位移控制結束。

圖9 高空作業車二段杠位移控制梯形圖
3.2.3作業平臺上升速度控制
作業平臺上升速度控制梯形圖如圖10所示。點擊I1.3啟動按鈕,高空作業車作業平臺上升速度控制開始,通過計數器C0來進行速度控制。當速度過快時Q0.7(超速提醒燈)得電,當超速嚴重時Q1.0得電,作業平臺停止上升,以保證工作人員的安全。

圖10 作業平臺上升速度控制梯形圖
4 仿真
對在S7-200 Step7-Micro/Win V4.0編程軟件中繪制的梯形圖進行編譯,并把編譯后的程序導出以AWI格式保存在桌面。使用S7-200仿真軟件裝載程序,同時將以AWI格式導出的文件裝載。
圖11為高空作業車作業平臺上升速度控制仿真圖。按下啟動按鈕,接通I0.0、I0.2、I0.3、I0.4、I0.5、I0.6、I0.7、I1.1、I1.3,Q0.2、Q0.3得電證明前、后腿調平完畢,Q0.3、Q0.4得電證明左、右腿調平完畢。

圖11 高空作業車作業平臺上升速度控制仿真
5 結束語
筆者設計的基于PLC的高空作業車自動調平控制系統,實現了高空作業車調平控制、上升桿位移控制及作業平臺上升速度控制等功能,能夠按照預期目標正常運行。系統程序設計時對系統的可靠性、穩定性進行了充分考慮,并加入了保護措施,以消除可能存在的事故隱患。高空作業車自動調平控制系統控制、操作簡單,使工作人員能夠在短時間內進行高空作業,且高空作業車的性能更加穩定、可靠。
[1] 趙靜一,安東亮,程斐,等.JHP26型高空作業車液壓控制系統研究[J].機床與液壓,2010,38(13):99~102.
[2] 段晨東,王小波,薛小慶,等.基于PCD控制器的高空作業平臺控制系統設計[J].建筑機械化,2012,33(2):50~53.
[3] 王蒙軍.基于PLC的純水高壓泵串級變頻控制[J].化工自動化及儀表,2013,40(5):646~647.
[4] 譚青,傅可明.自動調平系統在防空火炮中的應用[J].兵工自動化,2004,23(4):10~11.
[5] 孟凡芹,朱煥勤,耿光輝.PLC控制油封供油裝置的研制[J].化工機械,2011,38(2):220~221.
[6] 強寶民,趙典,劉陳,等.基于PLC與變頻器的智能起重機系統設計[J].化工自動化及儀表,2013,40(6):787~791.
[7] 胥軍,李剛炎,王鵬飛,等.折臂式高空作業車臂架變幅控制系統設計[J].工程機械,2012,43(10):49~53.
(Continued on Page 826)
ControlSystemforAuto-levelingofOverheadWorkingTrucksBasedonPLC
ZHAO Zhi-hua, LIU Yu-min,YAO Jian-hong
(SchoolofElectricalEngineeringandInformation,NortheastPetroleumUniversity,Daqing163318,China)
The S7-200 PLC-based auto-leveling control system for overhead working trucks was designed and the system hardware structure, working principle, control program and ladder diagram were presented. The simulation result shows that this control system can level overhead trucks automatically, realizes rising-stem
2016-02-02(修改稿)
黑龍江省自然科學基金項目(F201404)
TH862
A
1000-3932(2016)08-0805-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
