風(fēng)電場信息實(shí)時(shí)采集系統(tǒng)設(shè)計(jì)?
2016-11-28 01:29:26吳錦生王劍平
微處理機(jī) 2016年5期
吳錦生,王劍平
(昆明理工大學(xué)信息工程與自動化學(xué)院,昆明650500)
風(fēng)電場信息實(shí)時(shí)采集系統(tǒng)設(shè)計(jì)?
吳錦生,王劍平
(昆明理工大學(xué)信息工程與自動化學(xué)院,昆明650500)
針對目前風(fēng)電場信息采集時(shí)間間隔大,影響風(fēng)力發(fā)電組風(fēng)功率實(shí)測精度,以及來風(fēng)方向、風(fēng)速等不確定因素影響發(fā)電功率的問題,提出了一種基于STM8L和ZIGBEE的風(fēng)電場信息實(shí)時(shí)采集系統(tǒng)設(shè)計(jì)方案。系統(tǒng)采用基于STM8L的姿態(tài)電路和氣壓和溫濕度傳感器分別實(shí)時(shí)測量風(fēng)向、風(fēng)速、氣壓強(qiáng)度、溫度、濕度等環(huán)境信息,采用GPRS無線通信模塊遠(yuǎn)程監(jiān)測各風(fēng)力發(fā)電組狀態(tài),從而達(dá)到實(shí)時(shí)便捷監(jiān)測風(fēng)電場狀態(tài)和提高風(fēng)力發(fā)電功率測量精度的目的。
風(fēng)向;風(fēng)速;氣壓;功率;姿態(tài)電路;溫度;濕度
1 引 言
目前,風(fēng)電場每十分鐘記錄一次平均風(fēng)速、風(fēng)向和實(shí)測功率值等參數(shù)值,而溫度濕度僅靠數(shù)值天氣預(yù)報(bào)預(yù)測,這會因?yàn)閿?shù)據(jù)采集量少和未考慮空氣密度增大、風(fēng)力發(fā)電組實(shí)地溫濕度、壓強(qiáng)、上下風(fēng)向?qū)︼L(fēng)力發(fā)電組輸出功率的影響而使風(fēng)電場實(shí)測發(fā)電功率不準(zhǔn)確。
針對以上問題,提出了基于STM8L和GPRS的風(fēng)電場信息實(shí)時(shí)采集系統(tǒng),系統(tǒng)由GPRS電路、溫度傳感器電路、濕度傳感器電路、姿態(tài)測量電路、氣壓傳感器電路,MAX4066低損耗開關(guān)電路組成,整體設(shè)計(jì)框圖如圖1所示。
2 硬件設(shè)計(jì)
2.1超低功耗電路設(shè)計(jì)
系統(tǒng)采用鋰電池供電,對于電池供電系統(tǒng)來說,功耗是非常重要的指標(biāo)[1-3]。因此,利用STM8L超低功耗CPU電路和MAX4066低損耗開關(guān)電路對傳感器電路和GPRS通信電路進(jìn)行電源供電控制可以減少系統(tǒng)空閑時(shí)外圍電路不必要的損耗。
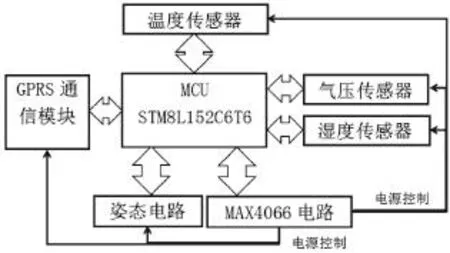
圖1 系統(tǒng)整體設(shè)計(jì)框圖
超低功耗具體實(shí)施步驟:系統(tǒng)采集溫濕度、氣壓、風(fēng)向、風(fēng)速信息前通過低損耗開關(guān)關(guān)閉GPRS通信模塊,等到傳感器數(shù)據(jù)采集結(jié)束再打開GPRS模塊進(jìn)行無線數(shù)據(jù)傳輸,同時(shí)關(guān)閉傳感器采集電路,等到GPRS數(shù)據(jù)傳輸結(jié)束時(shí)關(guān)閉GPRS模塊并且系統(tǒng)進(jìn)入超低功耗睡眠模式,等待系統(tǒng)定時(shí)喚醒重新進(jìn)入數(shù)據(jù)采集和無線通信階段。通過調(diào)整定時(shí)喚醒時(shí)間可以有效控制風(fēng)電場信息采集速率,經(jīng)由GPRS模塊可以遠(yuǎn)程設(shè)置各風(fēng)力發(fā)電組的數(shù)據(jù)采集速率。
2.2姿態(tài)電路設(shè)計(jì)
姿態(tài)電路主要包括L3G4200D、ADXL345和HMC5883L電路。該電路采用IIC總線與STM8L微控制器進(jìn)行通信,主要負(fù)責(zé)采集風(fēng)向、風(fēng)速信息,由于姿態(tài)電路可以測量三維姿態(tài)角,因此相對于傳統(tǒng)的0~360度風(fēng)向信息,姿態(tài)電路還可以實(shí)時(shí)監(jiān)測風(fēng)向的變化情況。通過測量三維姿態(tài)角可以有效解決上風(fēng)向風(fēng)電機(jī)組尾流對下風(fēng)向風(fēng)電組影響使得下風(fēng)向風(fēng)電機(jī)組捕獲風(fēng)能減少及相應(yīng)電機(jī)組出力降低的問題。姿態(tài)傳感器電路如圖2所示。
2.3溫度和濕度傳感器電路設(shè)計(jì)
系統(tǒng)選用DS18b20作為溫度傳感器檢測風(fēng)力發(fā)電機(jī)環(huán)境溫度。考慮到風(fēng)電機(jī)組外部環(huán)境條件復(fù)雜,因此采用防水DS18b20探頭來測量溫度,DS18b20作為一種單總線數(shù)據(jù)溫度傳感器,其測量溫度范圍大、精度高而且由于不需要時(shí)鐘線,故其占用的STM8L I/O端口少,其外圍電路配置簡單,僅需4.7K歐的上拉電阻。
系統(tǒng)采用HS1101作為濕度傳感器,其測量范圍為0~100%RH,誤差在-2%~+2%RH之間,而且其年漂移量較小。利用HS1101電容量隨空氣濕度變化呈現(xiàn)同性變化的特性,將HS1101振蕩電路產(chǎn)生的正弦波電壓信號經(jīng)過整流、直流放大輸出脈沖信號,并將脈沖信號經(jīng)過二極管整流電路、RC積分電路和線性調(diào)理電路后輸出在0~3.3V區(qū)間隨濕度變化的電壓信號。STM8L通過A/D轉(zhuǎn)換模塊將HS1101輸出的直流電壓轉(zhuǎn)化為數(shù)字量并換算為對應(yīng)的環(huán)境濕度數(shù)據(jù)。
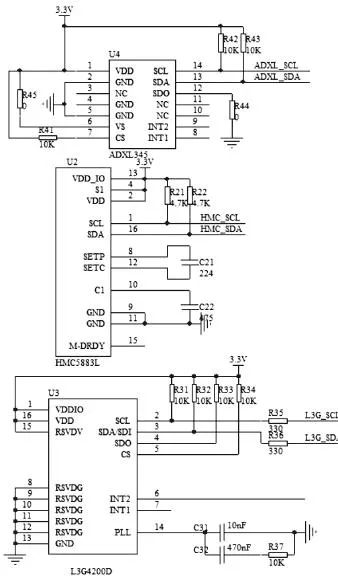
圖2 姿態(tài)電路
2.4GPRS通信電路設(shè)計(jì)
GPRS作為一種采用分組交換技術(shù)的數(shù)據(jù)傳輸技術(shù),具有實(shí)時(shí)在線、高速傳輸?shù)葍?yōu)點(diǎn),被廣泛應(yīng)用于工業(yè)控制領(lǐng)域,其應(yīng)用于風(fēng)電場監(jiān)控監(jiān)測非常合適[4]。系統(tǒng)采用工業(yè)級TC35i模塊,其GPRS模塊具備永久在線功能并能夠提供最快的數(shù)傳速率,其供電范圍為DC3.3~4.8V。通過串口通信可以讀寫TC35i模塊,接口電路簡單[5]。
2.5電源轉(zhuǎn)化模塊設(shè)計(jì)
由于系統(tǒng)需要3.3V、4.2V和5V三種電源供電,故設(shè)計(jì)了CE8301和LTC3440芯片構(gòu)成升降壓電路,CE8301電路將電池電壓升至5V,而LTC3440電路將電池電壓降至3.3V,進(jìn)而滿足系統(tǒng)供電需求。
2.6氣壓傳感器電路設(shè)計(jì)
系統(tǒng)采用BMP085氣壓傳感器測量大氣壓強(qiáng)。BMP085是一款高精度、超低功耗的數(shù)字傳感器,可以通過IIC接口與STM8L連接通信,傳感器內(nèi)部EEPROM存儲11個(gè)校準(zhǔn)系數(shù),用于對氣壓傳感器進(jìn)行溫度補(bǔ)償,從而降低外部環(huán)境造成的誤差,提高傳感器測量精度[6]。
3 姿態(tài)電路三維姿態(tài)測量
3.1陀螺儀求解三維姿態(tài)角
利用陀螺儀獲取三軸角速度Wx、Wy、Wz,并且利用三軸角速度解算出姿態(tài)四元數(shù),姿態(tài)四元數(shù)與三軸陀螺儀角速度滿足公式(1)的微分關(guān)系。
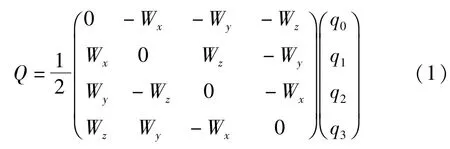
其中(q0,q1,q2,q3)T四元數(shù)初始化為(1,0,0,0),Q為(ˉq0,ˉq1,ˉq2,ˉq3)T表示矩陣求解更新后的姿態(tài)四元數(shù)。
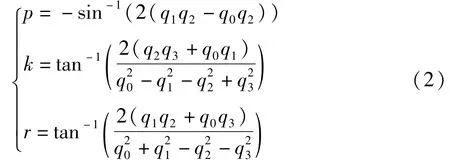
通過更新得到的四元數(shù)矩陣經(jīng)由式(2)可以得到陀螺儀求算的三維姿態(tài)角,其中,p為俯仰角,k為翻滾角,r為偏航角。
3.2重力加速度獲取三維姿態(tài)角
設(shè)定系統(tǒng)初始化狀態(tài)選取z軸豎直向上,從而p范圍為-90至90度,k范圍為-180至180度,r范圍為0至360度,從而得到翻滾角k和俯仰角p的計(jì)算公式為式(3)。其中,Ax、Ay、Az分別是測得的X軸、Y軸和Z軸的重力加速度
因此,可以通過三維重力加速度求算出此時(shí)的三維姿態(tài)角。
3.3三維姿態(tài)角修正
在沒有外力只有重力作用的情況下,重力加速度求算的三維姿態(tài)角為實(shí)際三維姿態(tài)角,此時(shí)重力加速度的三軸測量值的平方和應(yīng)為1。然而,由于測量值存在誤差,故需要利用加速度求算得到的姿態(tài)角修正陀螺儀得到的姿態(tài)角,從而得到精確的三維姿態(tài)角,通過數(shù)學(xué)建模和數(shù)據(jù)可以得到如式(4)的修正模型。

其中Aacce為重力加速度求算得到的姿態(tài)角,Agry為陀螺儀求算得到的姿態(tài)角,R為系統(tǒng)修正輸出的姿態(tài)角,k為修正因子。修正因子的取值如式(5),其中φ表示三軸重力加速度測量值的平方和。
系統(tǒng)先經(jīng)過卡爾曼濾波降低加速度計(jì)的噪聲干擾,并利用加速度計(jì)得到的三軸旋轉(zhuǎn)角修正陀螺儀得到的姿態(tài)角,從而解決了陀螺儀漂移。其輸出的俯仰角和翻滾角可以用于表示風(fēng)力發(fā)電機(jī)組受風(fēng)的上下左右偏向,而水平風(fēng)向則需要通過偏航角利用電子羅盤校準(zhǔn)得到,通過傾斜補(bǔ)償方法,減小航向角檢測的誤差。姿態(tài)角中的偏航角由式(6)對磁強(qiáng)計(jì)進(jìn)行傾斜補(bǔ)償獲得。其中,Mx、My、Mz分別為磁強(qiáng)計(jì)測得的三軸磁場強(qiáng)度。此時(shí)就可以獲得準(zhǔn)確的水平風(fēng)向角β。

通過測量陀螺儀瞬時(shí)角速度可以得到瞬時(shí)風(fēng)速信息,如式(7)。其中V為姿態(tài)電路測得的實(shí)時(shí)風(fēng)速數(shù)據(jù)。
4 氣壓與海拔高度換算
若假設(shè)空氣處于理想大氣壓狀態(tài),由于BMP085傳感器測量的海拔范圍為-500m至9000m,則由式(8)可獲得氣壓所對應(yīng)的海拔高度[7-8]。

其中,H為換算得到的海拔高度,Ph為傳感器測得的大氣壓強(qiáng)度。
5 測試結(jié)果與分析
利用重力加速度校準(zhǔn)陀螺儀并采取參數(shù)修正的方法可以得到準(zhǔn)確的三維姿態(tài)角輸出,無校準(zhǔn)與校準(zhǔn)情況下輸出的俯仰角數(shù)據(jù)對比如圖3所示。
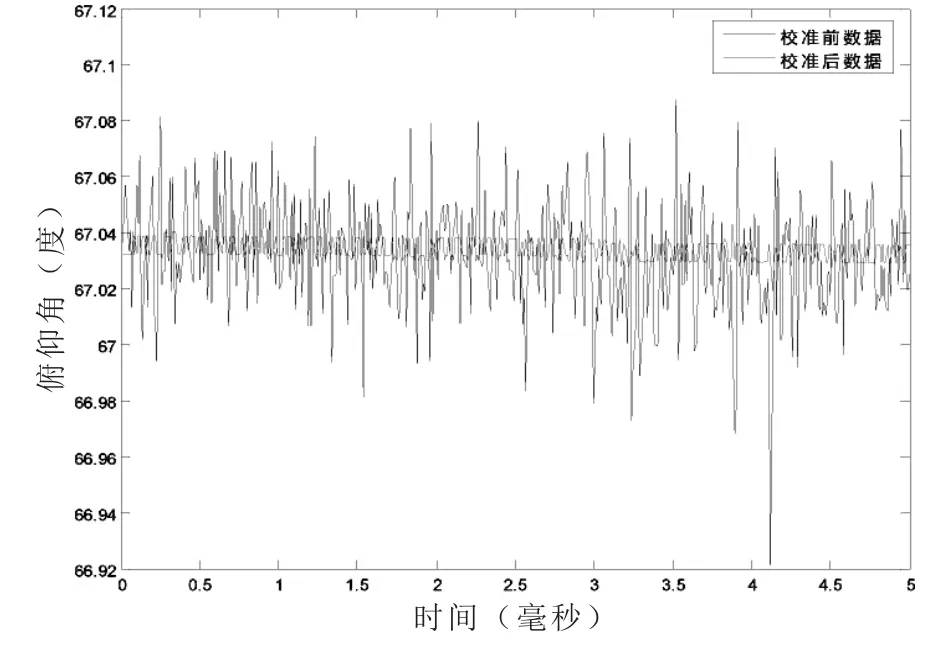
圖3 姿態(tài)校準(zhǔn)前后數(shù)據(jù)對比
系統(tǒng)處于穩(wěn)定狀態(tài)時(shí),由于外力影響,系統(tǒng)三軸重力加速度和陀螺儀數(shù)據(jù)會不穩(wěn)進(jìn)而導(dǎo)致計(jì)算得到的姿態(tài)角誤差較大,通過重力加速度校準(zhǔn)陀螺儀并通過修正可以獲得比較精確的姿態(tài)角輸出。風(fēng)向角度主要采用姿態(tài)角中的偏航角表示,由于偏航角還受地磁場影響,因此需要利用校準(zhǔn)后的偏航角校準(zhǔn)磁強(qiáng)計(jì)三軸磁強(qiáng)從而獲得實(shí)際準(zhǔn)確的偏航角,即為實(shí)際風(fēng)向角。校準(zhǔn)前后的偏航角如圖4所示。
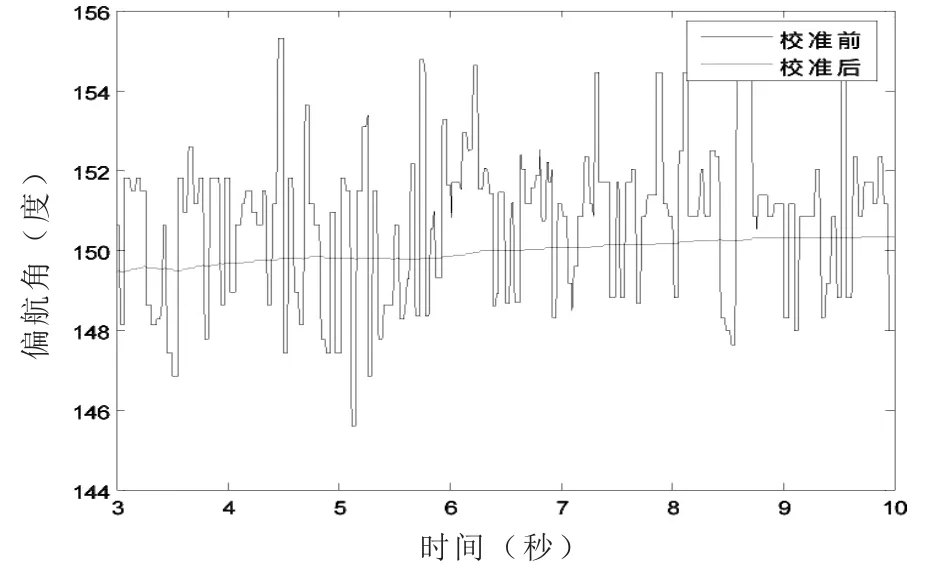
圖4 校準(zhǔn)前后偏航角對比
可以看出,校準(zhǔn)后偏航角的波動相對于姿態(tài)解算得到的偏航角要小很多,而且收斂性好。通過式(9)可以計(jì)算出風(fēng)力發(fā)電組獲得的風(fēng)功率,其中P為輸出功率,kW;C為風(fēng)力發(fā)電機(jī)組功率系數(shù);ρ為空氣密度,kg/m3;A為風(fēng)輪掃風(fēng)面積,m2;V為風(fēng)速,m/s。

由于風(fēng)速、氣壓、環(huán)境溫濕度等因素是風(fēng)力發(fā)電功率的主要影響因素,因此通過測量這些因素可以獲得精確的功率信息。
6 結(jié)束語
基于STM8L和GPRS的風(fēng)電場信息實(shí)時(shí)采集系統(tǒng)設(shè)計(jì)利用姿態(tài)電路測量風(fēng)向和風(fēng)速,利用溫度、濕度、氣壓傳感器測量風(fēng)電機(jī)組環(huán)境溫濕度、氣壓強(qiáng)度,利用STM8L微控制器和MAX4066低損耗開關(guān)實(shí)現(xiàn)系統(tǒng)超低功耗,利用GPRS模塊支持在線實(shí)時(shí)監(jiān)測,系統(tǒng)數(shù)據(jù)采集精度高,實(shí)時(shí)性好。
[1]陳靜,金林.便攜式煤礦電網(wǎng)參數(shù)實(shí)時(shí)檢測儀器的研究[J].煤礦機(jī)械,2005(4):99-101.Chen Jing,Jin Lin.Study on the Portable Digging Electrical Net Detect Instrument[J].Coal Mine Machinery,2005(4):99-101.
[2]張軍,徐海寧,鄭強(qiáng),等.一種超低功耗便攜式高斯計(jì)的設(shè)計(jì)[J].儀表技術(shù)與傳感器,2011(11):98-99,103.Zhang Jun,Xu HaiNing,Zheng Qiang.Design of Portable Gauss Meter with Ultra Low Power Consumption[J].Instrument Technique and Sensor,2011(11):98-99,103.
[3]李威,龐洵,劉大偉.礦用便攜式錨桿測力儀的研制[J].煤礦機(jī)械,2007(1):112-114.Li Wei,Pang Xun,Liu DaWei.Research on Portable Dynamometer for Anchor Stem in Mine[J].Coal Mine Machinery,2007(1):112-114.
[4]曹衛(wèi),董航飛,李宗寶.GPRS技術(shù)在水利監(jiān)測系統(tǒng)中的應(yīng)用[J].排灌機(jī)械,2007,25(5):39-42.Cao Wei,Dong HangFei,Li ZongBao.Application of GPRS technology in hydraulic monitoring system[J].Drainage and Irrigation Machinery,2007,25(5):39-42.
[5]葉衛(wèi),胡俊達(dá).基于TC35iGSM模塊的短消息收發(fā)系統(tǒng)設(shè)計(jì)[J].電子質(zhì)量,2008(6):27-29.Ye Wei,Hu JunDa.The Design of Short Message Communication System Based on GSM TC35i Module[J].Electronics Quality,2008(6):27-29.
[6]BOSCH Sensortec.BMP085 Digital Pressure Sensor Data Sheet[EB/OL].[2009-10-15].http://www.boschsensortec.com.
[7]Thomas Bob,Volker Diekmann,Reinhart jurgens.Biological Cybernetics[J].Sensor Fusion by Neural Network Using Spatially Represented Information,2001,85(5):371-385.
[8]吳浩然.大氣壓強(qiáng)和高度的關(guān)系[J].張家口師專學(xué)報(bào)(自然科學(xué)版),1994(1):22-25.Wu HaoRan.Relation of Pressure and Height in the Atmosphere Layer[J].Journal of Zhangjiakou Teachers College(Natural Science),1994(1):22-25.
Design of Wind Farm Real-time Information Acquisition System
Wu Jinsheng,Wang Jianping
(College of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China)
For the problems,the long time interval of wind power information collection which affects the measurement accuracy of the wind power of the wind power generation group,and the factors such as wind direction,wind speed,etc.,the design approach of the wind farm real-time information acquisition system,based on STM8L and GPRS,are put forward.Based on STM8L,the system real-time measures environmental information such as wind direction,wind speed,strength of pressure,temperature and humidity uses attitude circuit,air pressure,temperature and humidity sensor.The status of the wind power generation group is remotely monitored by GPRS wireless communication module so as to monitor the wind farm status in real-time and improve the measure accuracy for the wind power.
Wind direction;Wind speed;Air pressure;Power;Posture circuit;Temperature;Humidity
10.3969/j.issn.1002-2279.2016.05.016
TP274.2
A
1002-2279(2016)05-0064-04
?國家自然科學(xué)基金(61364008);云南省應(yīng)用基礎(chǔ)研究重點(diǎn)項(xiàng)目(2014FA029);云南省教育廳重點(diǎn)基金項(xiàng)目(2013Z127);昆明理工大學(xué)復(fù)雜工業(yè)控制學(xué)科方向團(tuán)隊(duì)建設(shè)計(jì)劃
吳錦生(1993-),男,廣東省汕頭市人,在讀碩士,主研方向:嵌入式系統(tǒng)與運(yùn)動控制。
王劍平(1975-),男,湖南省衡陽市人,副教授,主研方向:實(shí)時(shí)運(yùn)動控制及嵌入式計(jì)算機(jī)技術(shù)。
2016-03-07
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
