裝有動(dòng)力調(diào)節(jié)懸架系統(tǒng)車(chē)輛的頻域建模與仿真
2016-11-30 00:42:01張邦基易金花張農(nóng)章杰王立夫熊傳
湖南大學(xué)學(xué)報(bào)·自然科學(xué)版 2016年10期
張邦基+易金花+張農(nóng)+章杰+王立夫+熊傳楓


摘 要:以某越野車(chē)為樣車(chē),首次建立了裝有動(dòng)力調(diào)節(jié)懸架系統(tǒng)的車(chē)輛動(dòng)力學(xué)頻域模型,采用阻抗傳遞矩陣獲得油路的阻抗陣,通過(guò)數(shù)值優(yōu)化迭代尋根方法,求解模態(tài)特征值,并與建立的不帶橫向穩(wěn)定桿的整車(chē)模型和帶橫向穩(wěn)定桿的整車(chē)模型進(jìn)行模態(tài)參數(shù)對(duì)比和模態(tài)分析.結(jié)果表明,動(dòng)力調(diào)節(jié)懸架系統(tǒng)使車(chē)輛在保持原有乘坐舒適性的同時(shí),能有效抑制轉(zhuǎn)彎時(shí)車(chē)體的側(cè)傾運(yùn)動(dòng),且大幅降低簧下的扭轉(zhuǎn)剛度,越野路面時(shí)車(chē)輪能充分接觸地面,提高車(chē)輛通過(guò)性能.
關(guān)鍵詞:模態(tài)分析;動(dòng)力調(diào)節(jié)懸架系統(tǒng);整車(chē)動(dòng)力學(xué)模型;阻抗陣
中圖分類(lèi)號(hào):U463.33 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1674-2974(2016)10-0008-08
Abstract:This paper took an SUV vehicle as the prototype, established a frequency-domain model of vehicle with KDSS-fitted, based on the transfer matrix method to derive the impedance matrix of hydraulic subsystem, solved the eigenvalue in numerical optimization iteration method, compared and analyzed the modal parameters of KDSS-fitted vehicle, ARB-fitted vehicle and no-ARB-fitted vehicle model. The results indicate that KDSS is able to effectively reduce the roll motion of sprung mass in the same way as anti-roll bar, and simultaneously maintain the ride comfort performance. At the same time, the wheel torsion stiffness, compared with ARB, is greatly reduced. This gives the wheels full contact with the ground and improves the passing ability of the vehicle.
Key words:modal analysis;kinetic dynamic suspension system; vehicle dynamics model; impedance matrix eigenvalue identification
汽車(chē)橫向穩(wěn)定桿(Anti-Roll Bar, ARB)能提高側(cè)傾剛度,抑制轉(zhuǎn)彎時(shí)車(chē)身側(cè)傾,但ARB將左右車(chē)輪互聯(lián),在通過(guò)越野路面時(shí),降低了車(chē)輛的通過(guò)性和越野性.針對(duì)這一問(wèn)題,目前主要的解決方法有主動(dòng)式橫向穩(wěn)定桿、液壓互聯(lián)懸架、主動(dòng)懸架及動(dòng)力調(diào)節(jié)懸架系統(tǒng)(Kinetic Dynamic Suspension System, KDSS)等.
主動(dòng)式橫向穩(wěn)定桿一方面能平衡車(chē)身的側(cè)傾力矩,提高車(chē)輛穩(wěn)定性,另一方面能調(diào)節(jié)力矩的分配,從而調(diào)節(jié)汽車(chē)的動(dòng)力特性,保證車(chē)輛的通過(guò)性.Gosselin-Brisson等[1]設(shè)計(jì)的一款主動(dòng)式橫向穩(wěn)定桿,對(duì)越野路面的通過(guò)性及乘客舒適性都有很大的提高;Cronje等[2]設(shè)計(jì)的主動(dòng)橫向穩(wěn)定器與半主動(dòng)懸架結(jié)合,實(shí)現(xiàn)越野車(chē)在平順性、操穩(wěn)性模式之間的切換;李顯生[3]對(duì)裝有主動(dòng)橫向穩(wěn)定器的實(shí)車(chē)進(jìn)行了多項(xiàng)實(shí)驗(yàn)研究.
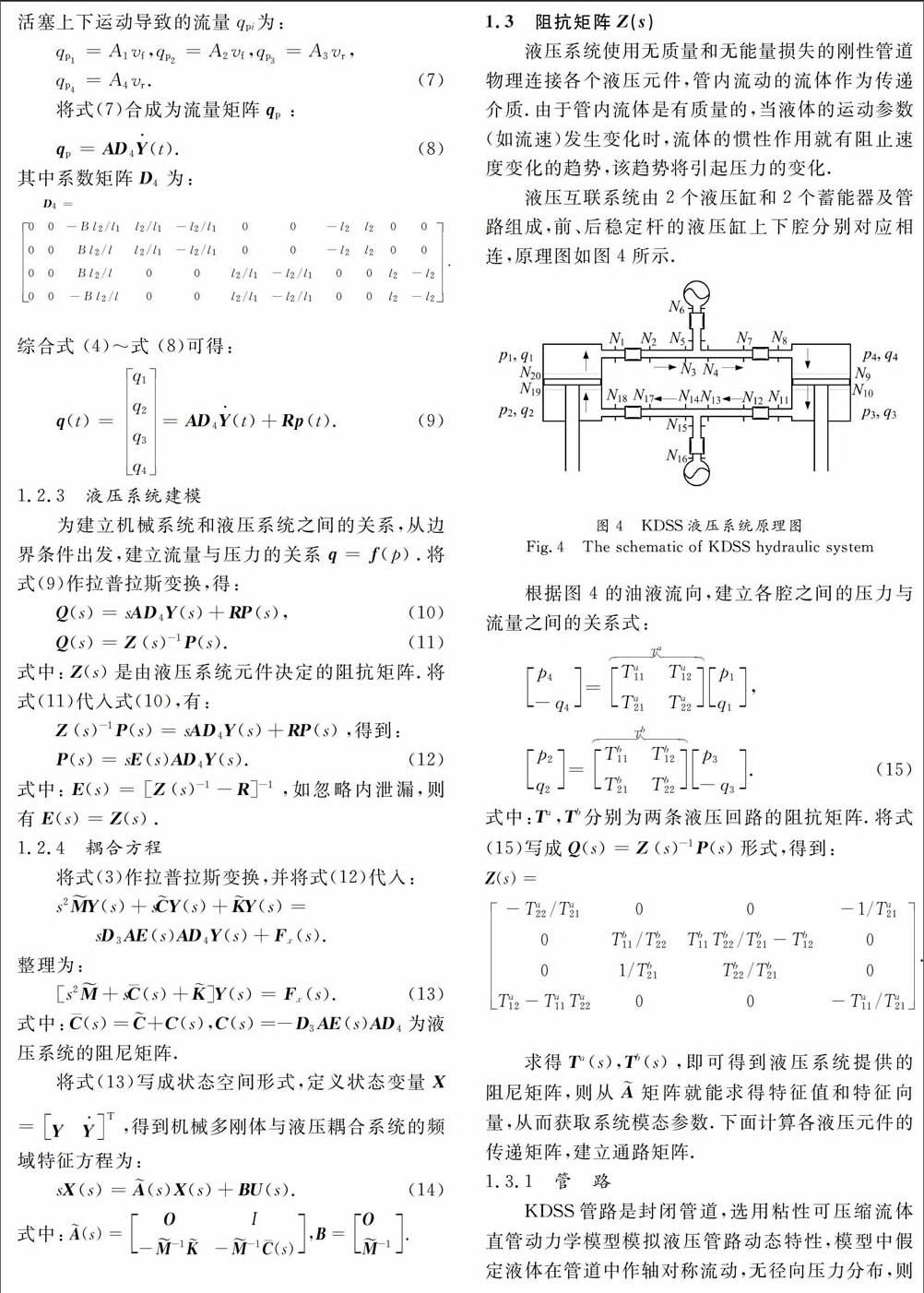
液壓互聯(lián)懸架系統(tǒng)是一套懸架輔助系統(tǒng),不同的互聯(lián)形式和結(jié)構(gòu)對(duì)車(chē)輛行駛性能影響不同.郭孔輝等[4]提出多種液壓式耦聯(lián)懸架系統(tǒng)以改善車(chē)輛的操穩(wěn)性和通過(guò)性;文獻(xiàn)[5-7]提出了液壓懸架不同的互聯(lián)方式,對(duì)車(chē)輛有抗側(cè)傾、抗俯仰、抗垂向和消扭等不同的作用效果,在頻域和時(shí)域?qū)σ簤夯ヂ?lián)懸架進(jìn)行了理論推導(dǎo)和試驗(yàn)驗(yàn)證.
主動(dòng)懸架能夠根據(jù)車(chē)輛的運(yùn)動(dòng)狀態(tài),實(shí)時(shí)調(diào)節(jié)懸架的剛度和阻尼,但需要較大的能量輸入,且成本較高.Aoyama等[8]研發(fā)的主動(dòng)油氣懸架系統(tǒng)將壓力控制閥同小型蓄能器和液壓油缸相結(jié)合以降低能量損耗,并實(shí)現(xiàn)對(duì)剛度和阻尼的調(diào)節(jié);郭孔輝等[9-11]建立了車(chē)輛模型,從車(chē)輛平順性和操穩(wěn)性出發(fā),設(shè)計(jì)最優(yōu)控制器;周兵等[12-14]對(duì)主動(dòng)懸架控制器進(jìn)行了深入研究和有效設(shè)計(jì).
KDSS包含斷開(kāi)式橫向穩(wěn)定桿及液壓系統(tǒng)[15],相比于傳統(tǒng)橫向穩(wěn)定桿,兼具抗側(cè)傾和消扭性能;相比于液壓互聯(lián)懸架,結(jié)構(gòu)更為簡(jiǎn)單;相比于主動(dòng)和半主動(dòng)懸架,成本更低,無(wú)電子控制部分.該技術(shù)雖已運(yùn)用到豐田公司的部分高端越野車(chē)上,但缺乏深入系統(tǒng)的理論分析.本文通過(guò)建立KDSS頻域模型,結(jié)合整車(chē)7自由度模型,與傳統(tǒng)的不帶ARB車(chē)輛和帶ARB車(chē)輛進(jìn)行整車(chē)性能對(duì)比分析,從理論上驗(yàn)證KDSS能提高車(chē)輛側(cè)傾剛度,降低簧下扭轉(zhuǎn)剛度,且對(duì)車(chē)身垂向剛度和俯仰剛度影響很小.
3 結(jié)果分析
根據(jù)表2~表4的結(jié)果,對(duì)裝有KDSS整車(chē)分別與不帶ARB、帶ARB的車(chē)輛進(jìn)行模態(tài)對(duì)比分析.
安裝KDSS之后,越野車(chē)的各模態(tài)產(chǎn)生了變化.相對(duì)于不帶ARB車(chē)輛的側(cè)傾模態(tài)頻率1.5 Hz,裝KDSS車(chē)輛增大到1.546 Hz,說(shuō)明KDSS能提高整車(chē)的側(cè)傾剛度,而側(cè)傾模態(tài)的阻尼比變化很小,說(shuō)明在不考慮作動(dòng)器和管路阻尼的情況下,KDSS對(duì)原車(chē)阻尼影響很小;相對(duì)于不帶ARB懸架車(chē)輛的俯仰模態(tài)頻率3.36 Hz,裝KDSS車(chē)輛增大到3.4 Hz,說(shuō)明KDSS對(duì)整車(chē)的抗俯仰性能有所提高,但幅度較小;車(chē)身垂向模態(tài)的固有頻率從1.95 Hz 增大至 1.96 Hz,幅度很小,可以忽略.以上結(jié)果證明安裝KDSS之后整車(chē)車(chē)身側(cè)傾模態(tài)的固有頻率提高了,對(duì)車(chē)身垂向模態(tài)和俯仰模態(tài)的影響不大,裝有KDSS車(chē)輛的車(chē)身側(cè)傾剛度提高可以有效地提高車(chē)輛在轉(zhuǎn)彎時(shí)的安全性,抑制車(chē)輛側(cè)翻現(xiàn)象的發(fā)生.
相對(duì)于帶ARB車(chē)輛,安裝KDSS車(chē)輛的車(chē)輪扭轉(zhuǎn)模態(tài)固有頻率從12.90 Hz 減小到12.57 Hz,有明顯降低,與不帶ARB車(chē)輛的車(chē)輪扭轉(zhuǎn)模態(tài)固有頻率相差較小,扭轉(zhuǎn)固有頻率的下降說(shuō)明KDSS在扭轉(zhuǎn)路面時(shí)會(huì)解除ARB的作用,使懸架的動(dòng)撓度增大,車(chē)輪能充分接觸到地面,車(chē)輛的越野性和通過(guò)性變好.對(duì)于在崎嶇山路行駛的越野車(chē)輛而言,它的作用是必不可少的,并且對(duì)車(chē)身而言,減小或消除了4個(gè)橡膠套接觸點(diǎn)扭轉(zhuǎn)力的作用,釋放了車(chē)身受到的扭轉(zhuǎn)力,延長(zhǎng)了車(chē)輛的使用壽命.
4 結(jié) 論
建立了裝有KDSS的車(chē)輛頻域模型,利用傳遞矩陣法推導(dǎo)出液壓系統(tǒng)每個(gè)回路的阻抗陣,組成通路矩陣,運(yùn)用尋根求最優(yōu)特征值方法,獲得了機(jī)械液壓耦合系統(tǒng)的特征值.分析了KDSS的模態(tài)特性,與不帶ARB車(chē)輛和帶ARB車(chē)輛的頻域模型進(jìn)行了對(duì)比,結(jié)果表明,KDSS與傳統(tǒng)ARB一樣,提高了車(chē)輛側(cè)傾剛度,并且KDSS消除了穩(wěn)定桿的扭轉(zhuǎn),降低了簧下的扭轉(zhuǎn)剛度, 使車(chē)輪能充分接觸地面,保證了車(chē)輛良好的通過(guò)性.
參考文獻(xiàn)
[1] GOSSELIN-BRISSON S,BOUAZARA M,RICHARD M J. Design of an active anti-roll bar for off-road vehicles[J]. Shock and Vibration,2009,16(2):155-174.
[2] CRONJE′P H,ELS P S. Improving off-road vehicle handling using an active anti-roll bar[J].Journal of Terramechanics,2010,47(3):179-189.
[3] 李顯生.商用車(chē)行駛安全性及主動(dòng)橫向穩(wěn)定器的研究[D]. 長(zhǎng)春:吉林大學(xué)汽車(chē)工程學(xué)院, 2002.
LI Xian-sheng.Driving safety of commercial vehicle with active anti-roll bar[D].Changchun: College of Automotive Engineering, Jilin University, 2002. (In Chinese)
[4] 郭孔輝,陳禹行,莊曄,等.油氣耦連懸架系統(tǒng)的建模與仿真研究[J].湖南大學(xué)學(xué)報(bào):自然科學(xué)版,2011,38(3):29-33.
GUO Kong-hui,CHEN Yu-xing,ZHUANG Ye,et al.Modeling and simulation study of hydro-pneumatic interconnected suspension system [J].Journal of Hunan University:Natural Sciences,2011,38(3):29-33. (In Chinese)
[5] SMITH W A,ZHANG N,HU W.Hydraulically interconnected vehicle suspension: handling performance[J].Vehicle System Dynamics,2011,49(1):87-106.
[6] ZHANG N, SMITH W A,JEYAKUMARAN J.Hydraulically interconnected vehicle suspension: Background and modelling[J].Vehicle System Dynamics,2010,48(1):17-40.
[7] 丁飛,張農(nóng),韓旭.安裝液壓互聯(lián)懸架貨車(chē)的機(jī)械液壓多體系統(tǒng)建模及模態(tài)分析[J].機(jī)械工程學(xué)報(bào),2012,48(6):116-123.
DING Fei,ZHANG Nong,HAN Xu. Modeling and modal analysis of multi-body truck system fitted with hydraulically interconnected suspension [J].Journal Mechanical Engineering,2012, 48(6):116-123. (In Chinese)
[8] AOYAMA Y, KAWABATE K, HASEGAWA S. Development of the fully active suspension by Nissan[J]. SAE Paper 901747, 1990,99(6):77-85.
[9] 郭孔輝,余五輝,章新杰,等.自適應(yīng)半主動(dòng)懸架系統(tǒng)控制策略[J]. 湖南大學(xué)學(xué)報(bào):自然科學(xué)版,2013,40(2):39-44.
GUO Kong-hui,YU Wu-hui,ZHANG Xin-jie,et al.Semi-active suspension adaptive control strategy [J].Journal of Hunan University:Natural Sciences,2013, 40(2):39-44. (In Chinese)
[10]方敏,應(yīng)艷杰,汪洪波,等.基于整車(chē)轉(zhuǎn)向模型的汽車(chē)主動(dòng)懸架控制研究[J].中國(guó)機(jī)械工程,2006,17(4): 431-439.
FANG Min,YING Yan-jie,WANG Hong-bo,et al.Study on active suspension control based on full-vehicle model of steering and suspension systems [J].China Mechanical Engineering,2006,17(4): 431-439. (In Chinese)