主動脈沖轉向的橫擺穩定性分析與試驗研究
2016-11-30 00:58:55張寶珍阿米爾謝暉黃晶
湖南大學學報·自然科學版 2016年10期
張寶珍+阿米爾+謝暉+黃晶
摘 要:提出了一種后輪脈沖主動轉向控制策略,運用脈沖信號作為控制器輸出的后輪主動轉向控制方法,對此做了理論分析和試驗研究.首先,設計了產生脈沖信號的液壓系統,并分析了此系統的運行對懸架參數和車輛穩態和瞬態響應的影響;分析不同脈沖參數(頻率,振幅)對車輛橫擺運動的影響并確定最優的脈沖參數.其次,綜合跟隨理想橫擺角速度和抑制汽車質心側偏角的方法,提出了控制策略與算法;運用基于CarSim 和Simulink的聯合仿真方法,分析此系統對汽車橫擺穩定性能的影響;最后,安裝液壓脈沖發生器進行整車試驗研究,驗證仿真結果的可信性,并評價后輪脈沖轉向的實用性.仿真和試驗結果表明:后輪脈沖主動轉向能夠有效的跟蹤橫擺角速度和質心側偏角提高車輛的橫擺穩定性,同時可以減少質心側傾角和側向加速度,提高汽車的操縱穩定性.
關鍵詞:穩定性;后輪主動脈沖轉向控制;車輛動力學;橫擺控制;整車試驗
中圖分類號:U467.1 文獻標識碼:A
文章編號:1674-2974(2016)10-0032-10
Abstract:The analysis and test of a rear wheel pulsed active steering control strategy was proposed. First, the effect of installation and operation of hydraulic pulse actuator on the suspension parameters and the improvement of the vehicle's steady and transient state response due to the control of active pulse were investigated. Second, a full vehicle model of a SUV equipped with the steering actuator was built in Carsim and co-simulated with Simulink as the control module.The structure of control strategy considering yaw rate error and side-slip angle error was designed to improve the stability and path. Finally, a whole test bed was designed and assembled for a SUV to carry out road experiments with different maneuvers to validate the results obtained from the simulations and to assess the applicability of the pulsed active steering system. Simulation and test results have indicated that considerable improvement in the yaw stability control can be achieved. Meanwhile, the rear wheel pulse active controller can reduce the lateral acceleration and the roll angle.
Key words: stability; rear wheel pulse active steering; vehicle dynamics; yaw stability control; full vehicle test
隨著汽車擁有量的逐漸增加和行駛速度的不斷提高,道路交通安全已經成為當今世界一個嚴重的社會問題.如何通過先進的結構設計及有效地控制技術來提高車輛動力學特性,從而改善其轉向過程的動態響應特性,路徑跟蹤性能以及對不同道路條件的適應性,最終獲得良好的車輛操控性和行駛穩定性便成為目前車輛動力學及控制領域研究的重要方向.目前主動控制技術主要有:主動/半主動懸架控制,直接橫擺力矩控制(DYC),主動轉向控制,聯合控制等.主動/半主動懸架通過調整懸架阻尼特性,可以一定程度的提高汽車的行駛穩定性[1-2],但是,主動懸架結構復雜,成本高,對舒適性有一定的影響,限制了其使用.DYC是利用分配不等的制動力給各個車輪,由此產生橫擺力矩來控制車輛穩定性的方法[3],B.C.Chen等利用ABS實現了差動制動系統防側翻控制[4],然而,直接橫擺力矩控制有一定的局限性,在輪胎兩側路面的附著系數不一樣的情況下,效果受到了很大的限制[5].主動轉向技術是一種可以有效控制汽車橫擺運動和側傾運動的方法,包括主動前輪轉向控制和四輪轉向控制[6-7].但是由于轉向輪轉向角度的變化,同時改變了駕駛員的駕駛意圖,從而改變了汽車的理想軌跡.為了滿足不同行駛路況的要求,可以聯合多種控制措施進行綜合控制[8],這樣就可以充分利用各種措施的優點,彌補每種控制的不足.但以上幾種主動控制技術都有自己的缺陷與特定適應條件,基于以上不足,提出了一種新的主動轉向技術來改善車輛的橫擺運動:后輪脈沖主動轉向.Kuo[9]和Abdel-Rahman[10]把脈沖轉向技術運用到前輪主動控制,分析了脈沖信號對汽車橫擺和側傾的影響,取得了不錯的效果,但也產生了對汽車制動和駕駛員的干擾.
本文以SUV車輛為研究對象,設計了液壓脈沖轉向系統,建立了車輛橫擺和側傾模型,分析后輪主動脈沖轉向對車輛橫擺穩態和瞬態的影響;設計了后輪主動脈沖轉向(RWAPS)控制策略與算法,分析脈沖幅值和頻率對車輛橫擺性能的影響,并確定其最優值;運用Simulink和CarSim進行聯合仿真,驗證RWAPS的有效性與可信性;設計制造了液壓脈沖發生裝置并安裝在SUV試驗車進行了試驗研究,驗證RWAPS方法的有效性與適用性.
1 車輛與脈沖發生器模型的建立
1.1 車輛橫擺和側傾模型
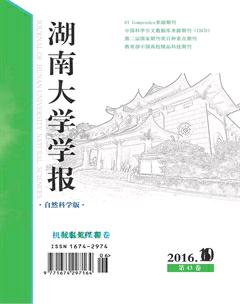
車輛行駛狀態下的動力學模型是研究車輛橫擺控制的基礎.根據車輛坐標系,對SUV車輛建立三自由度車輛動力學模型[11],此模型具有較好的精度,描述了汽車的橫向運動和側傾運動,以汽車的前輪和后輪轉角為輸入.汽車的結構參數及受力運動定義如圖1所示,其微分方程如下:
1.2 SUV多連桿后懸架ADAMS模型
為了分析液壓脈沖發生裝置執行機構的運動對懸架參數的影響,建立了基于試驗的SUV樣車的多連桿后懸架ADA MS模型,所測得的懸架硬點參數如表1所示,由此建立的ADAMS后懸架模型如圖2所示.
1.3 液壓脈沖發生器設計與建模
液壓脈沖發生系統的執行機構安裝在多連桿懸架的連桿上用來產生后輪脈沖轉向,如圖2中點13.本小節介紹的液壓系統的設計和建模,可為后續的仿真和試驗做準備.在此系統中,液壓油被輸送到執行機構中推動后輪進行轉向,其油量的大小和運動方向由驅動電機控制的液壓閥的轉速和轉向決定,驅動電機運動由控制單元的控制算法決定,如圖3所示.此液壓機械脈沖轉向系統可以看成由液壓傳遞部分和液壓缸執行部分組成.
從圖4和圖5可以看出,活塞位移的變化可以明顯改變車輛的穩態橫擺速度增益和車輛側傾角增益,提高車輛的穩態轉向性能.本文運用此方法來控制實際車輛來跟隨理想的橫擺角速度和質心側偏角,同時減少車輛的側傾角提高車輛的操縱穩定性.
2.2 車輛瞬態特性分析
對方程(9)進行拉氏變換,可得到橫擺角速度和質心側偏角對活塞位移的傳遞函數,如方程(11)所示:
頻率響應分析衡量了系統輸出與輸入的一種動態特性關系,此文中用來衡量活塞運動頻率對車輛橫擺參數的影響,如圖6中的橫擺角速度和質心側偏角的頻率響應,運用此種方法來選擇最優的活塞運動頻率,進而選擇最優的電機運轉頻率,提高車輛的橫擺運動的控制水平.
3 控制系統的結構與設計
3.1 后輪脈沖轉向控制的策略
后輪脈沖轉向控制策略(Rear Wheel Pulse Active Steering, RWPAS),運用脈沖轉向信號來調整車輛的運動狀態,通過后輪主動脈沖轉向來達到控制汽車穩定性的目的,系統控制器根據系統的誤差來確定其是否激活控制信號,其轉向控制信號是脈沖式的,類似于ABS中的制動力控制,如圖7所示.
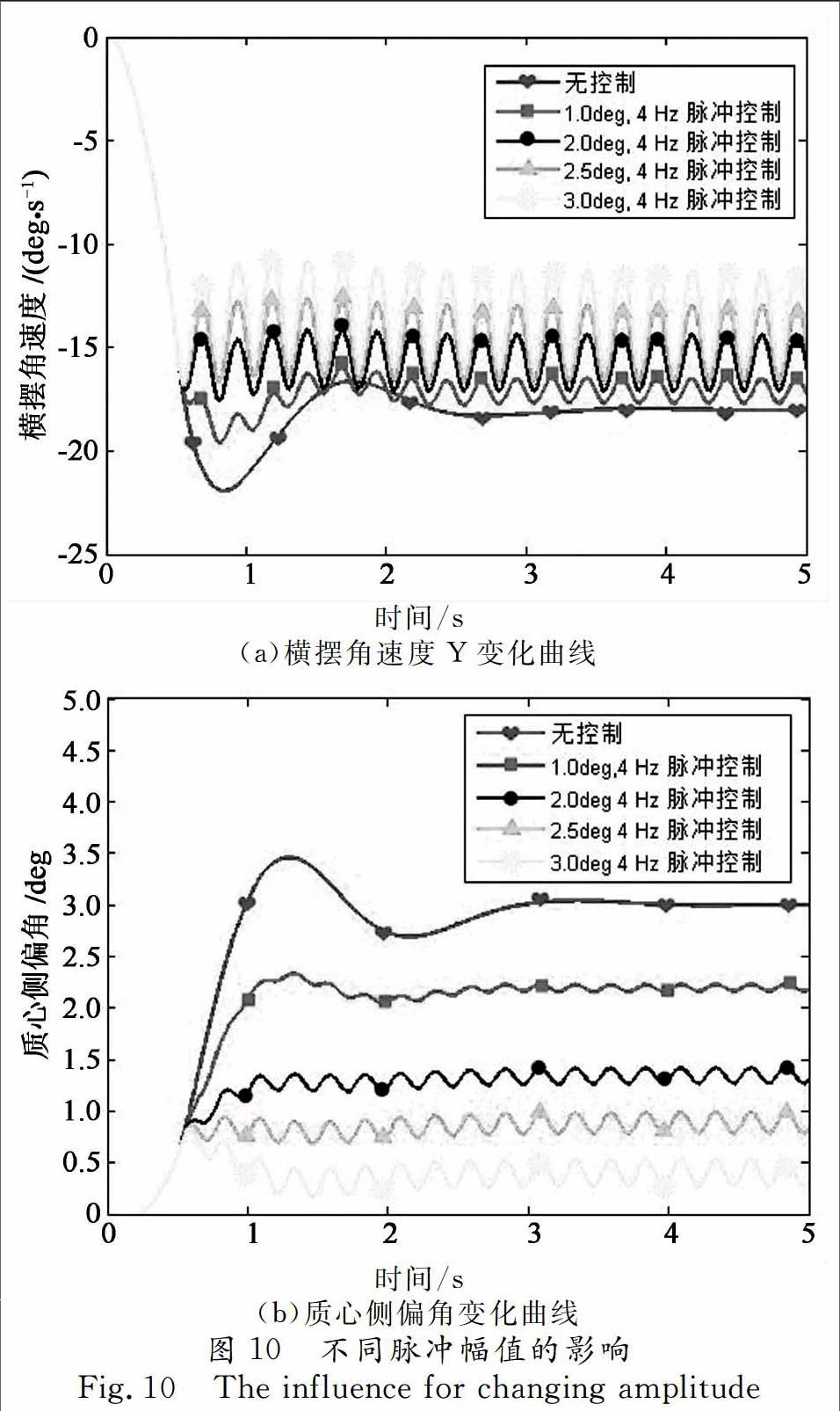
駕駛員控制汽車的轉向角度和車速,把這兩個參數輸入到被控車輛和理想參考模型中,計算出橫擺角速度,質心側偏角,側傾角度等參數,然后輸入到誤差評估器,計算此時的誤差,通過誤差的大小由控制器來控制脈沖發生器的啟閉.
3.2 橫擺控制目標選擇
車輛的質心側偏角和橫擺角速度是車橫擺控制的兩個重要參數.文獻[12]闡述橫擺控制主要有3種方式:質心側偏角控制,橫擺角速度控制,綜合控制.此文選取質心側偏角和橫擺角速度為控制目標來跟蹤理想的參考值,來提高車輛的側向穩定性和操縱性能,其理想的參考值如方程(12)所示:
3.3 控制器的控制算法
后輪脈沖轉向控制算法如圖8所示,通過計算實際車輛參數與理想參數誤差的大小,來決定脈沖發生器的啟閉.如果誤差在設計的閥值安全范圍之內,那么算法就會輸出“0”即脈沖發生器不被激活;如果誤差超過了設定的閥值,那么算法就會根據誤差大小來激活一個預訂的幅值和頻率的脈沖,激活脈沖發生器使后輪產生一個脈沖主動轉向角,來控制車輛的運動,如果誤差仍然超出閥值,那么就產生一系列的脈沖信號來控制后輪進行脈沖轉向,直到誤差控制在理想的范圍之內.值得一提的是,一旦脈沖發生器啟動,那么至少要產生一個完整的脈沖信號周期或者一系列的脈沖轉向周期,這樣讓后輪停止主動轉向時回到正常的初始位置,即轉角為零的位置.
4 脈沖參數的分析與設計
脈沖信號的信息主要包括脈沖形式,幅值,頻率3個基本的參數,其不同的脈沖參數會對系統的控制有不同的影響,本節分析不同脈沖參數的影響,并確定其最優值.
4.1 轉向脈沖形式的選擇
為了設計一定形式的后輪脈沖轉向信號,脈沖信號的表達形式必須在仿真和試驗運用過程中都是合理的而且其幅值和頻率是容易調節的,在本文的研究中,其脈沖信號選用標準正弦脈沖信號,其幅值和頻率可以方便的通過控制驅動電機的轉速和轉向來實現,其方程表達式如下:
4.2 轉向脈沖頻率分析與優選
選用正弦脈沖信號并固定脈沖幅值,在階躍轉向工況條件下,車輛每次仿真中的脈沖頻率分別為1 Hz, 2 Hz, 3 Hz, 4 Hz和5 Hz,通過此仿真分析不同脈沖頻率對車輛橫擺性能的影響,仿真結果如圖9所示.
從仿真結果圖9可以看出,不同的頻率對橫擺參數有不同的影響,隨著頻率的不斷增大,其對控制指標的影響隨之增大,但頻率到達一定值時,其影響會隨之減少.最優頻率可以根據2.2節中的頻率響應分析確定,最優的脈沖頻率為幅值增益最大時,所對應的角頻率的值,選定為3 Hz.
4.3 轉向脈沖幅值分析與優選
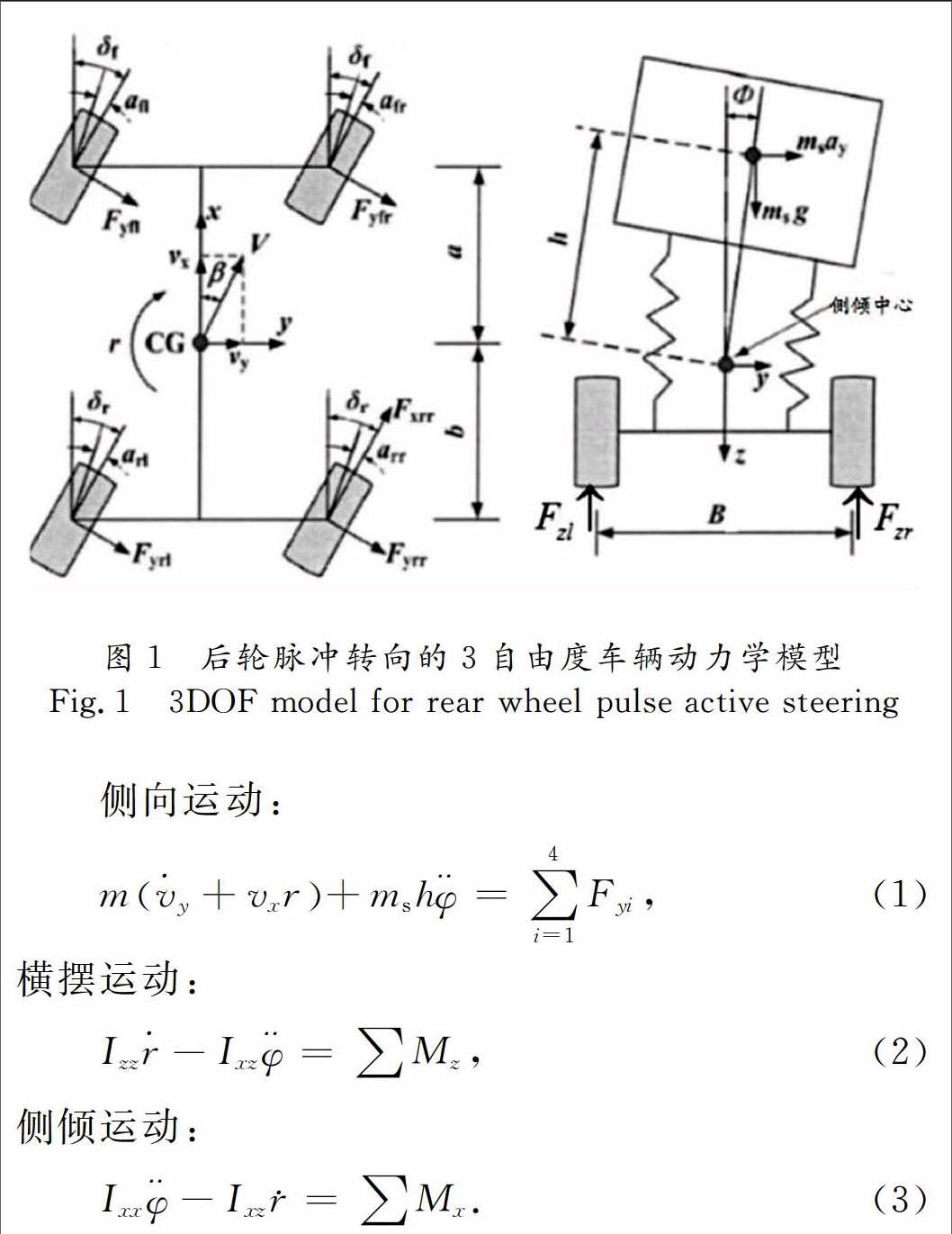
固定正弦脈沖信號的頻率為4 Hz,車輛在階躍轉向工況仿真中,其幅值分別為1.0 deg, 2.0 deg, 2.5 deg和3.0 deg, 通過此仿真分析不同脈沖頻率對車輛橫擺性能的影響,仿真結果如圖10所示.
從仿真結果圖10可以看出,隨之幅值的增大,其橫擺速度和質心側偏角的減少量會隨之增加,及幅值越大對橫擺參數的影響也就越大,但本文中用驅動電機來產生脈沖轉向,當轉向脈沖幅值增大時,需要更大的驅動力來驅動轉向,就需要更大功率的電機,所需的轉向機械功率如下:
式中:Mz為轉向后輪繞Z方向的力矩,δrt為設計的轉向后輪的脈沖信號.考慮實際試驗中電機安裝空間和尺寸的限制以及輪胎側向力的非線性特性,本文選定最優的脈沖幅值為2.0度.