基于MEMS的運(yùn)動(dòng)體姿態(tài)角度測(cè)量系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2016-11-30 09:07:08徐萬(wàn)芝高國(guó)偉潘宏生楊寰毛瑞燕
傳感器世界 2016年7期
徐萬(wàn)芝 高國(guó)偉 潘宏生 楊寰 毛瑞燕
1.北京信息科技大學(xué)傳感器重點(diǎn)實(shí)驗(yàn)室,北京100192;
2.北京國(guó)科艦航傳感技術(shù)有限公司,北京 100101
3.北京機(jī)械設(shè)備研究所物資供應(yīng)室,北京 100039
一、引言
隨著我國(guó)工業(yè)技術(shù)的不斷發(fā)展,姿態(tài)測(cè)量廣泛應(yīng)用于各個(gè)領(lǐng)域中,無(wú)論是定位、定向,還是導(dǎo)航都離不開姿態(tài)測(cè)量。運(yùn)動(dòng)體姿態(tài)測(cè)量系統(tǒng)是提供運(yùn)動(dòng)體三軸的角速率、俯仰角和橫滾角信息的裝置,是運(yùn)動(dòng)體實(shí)現(xiàn)姿態(tài)控制的前提,它不僅可以為運(yùn)動(dòng)體姿態(tài)控制系統(tǒng)提供三維姿態(tài)信息,也可以為數(shù)據(jù)記錄器提供運(yùn)動(dòng)體的三維姿態(tài)信息以備事后分析。
隨著微電子技術(shù)的發(fā)展而出現(xiàn)的微電子機(jī)械系統(tǒng)(MEMS)具有尺寸小、重量輕、成本低、功耗小和動(dòng)態(tài)范圍寬等優(yōu)點(diǎn),被廣泛應(yīng)用于測(cè)量領(lǐng)域[1,2]。本文應(yīng)用MEMS技術(shù),設(shè)計(jì)出一種成本低、性能好、功耗低的運(yùn)動(dòng)體姿態(tài)測(cè)量系統(tǒng),能較好的實(shí)現(xiàn)運(yùn)動(dòng)體姿態(tài)角度的測(cè)量。
二、系統(tǒng)總體設(shè)計(jì)
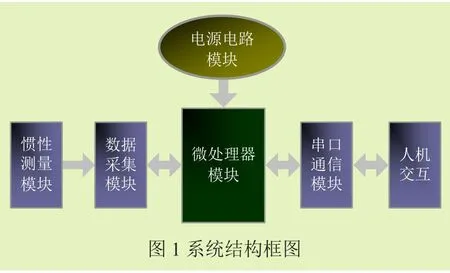
系統(tǒng)基本的結(jié)構(gòu)框圖如圖1所示。 本文選用六軸運(yùn)動(dòng)處理組件,包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺儀,加速度計(jì)測(cè)量運(yùn)動(dòng)體在坐標(biāo)系統(tǒng)中獨(dú)立三軸的加速度信號(hào),而陀螺儀檢測(cè)運(yùn)動(dòng)體相對(duì)于導(dǎo)航坐標(biāo)系的角速度信號(hào),從而測(cè)量運(yùn)動(dòng)體在三維空間中的角速度和加速度。本文的設(shè)計(jì)思路是通過(guò)慣性測(cè)量模塊測(cè)量運(yùn)動(dòng)體的加速度和角速度信號(hào),再經(jīng)微處理器模塊進(jìn)行姿態(tài)解算,進(jìn)而得出運(yùn)動(dòng)體的姿態(tài)信息,最后通過(guò)串口通信模塊將數(shù)據(jù)傳輸?shù)缴衔粰C(jī),得到實(shí)時(shí)且可視化的姿態(tài)信息。
三、系統(tǒng)硬件設(shè)計(jì)
1、微處理器模塊
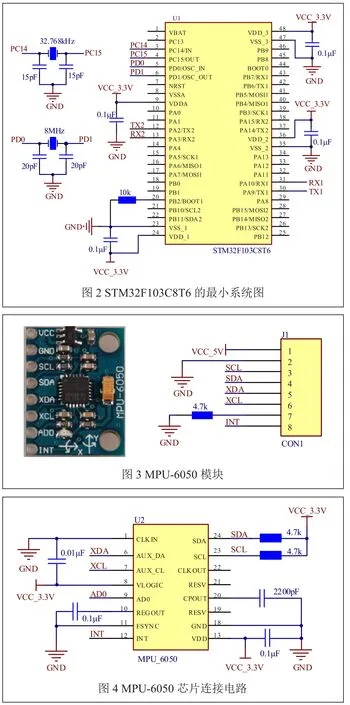
本系統(tǒng)微處理器模塊選用STM32F103C8T6,這是意法半導(dǎo)體公司 生 產(chǎn) 的ARM 32位 的Cortex?-M3 CPU,工作頻率最高可達(dá)72MHz,內(nèi)置高速存儲(chǔ)器,擁有64K字節(jié)的閃存和20K字節(jié)的SRAM,豐富的增強(qiáng)I/O端口和聯(lián)接到兩條APB總線的外設(shè),工作電壓范圍在2.0~3.6V,具有高速性、低成本、高性價(jià)比等優(yōu)點(diǎn)。STM32F103C8T6的最小系統(tǒng)如圖2所示。
2、慣性測(cè)量模塊
慣性測(cè)量模塊是姿態(tài)測(cè)量系統(tǒng)的重要組成部分,本系統(tǒng)所選用的是硬件為MPU-6050模塊。MPU-6050是一個(gè)可直接使用的模塊,整合了MPU-6050芯片、供電電路及其端口電路,測(cè)量精準(zhǔn)且性價(jià)比較高。MPU-6050芯片設(shè)有3個(gè)16位模擬-數(shù)字轉(zhuǎn)換器,用于數(shù)字化陀螺儀和加速度計(jì)輸出。用戶可對(duì)陀螺儀和加速度計(jì)進(jìn)行編程控制,陀螺儀滿量程測(cè)量范圍為 ±250、±500、±1000與 ±2000°/s,加速度計(jì)滿量程測(cè)量范圍為±2g、±4g、±8g與±16g,對(duì)于快速和慢速運(yùn)動(dòng)可進(jìn)行精確跟蹤。模塊實(shí)物及端口電路如圖3所示。
MPU-6050芯片是全球首例整合性六軸運(yùn)動(dòng)處理傳感器,它消除了組合陀螺儀與加速度計(jì)時(shí)存在軸間差的問(wèn)題,使封裝空間得到了大量減少,消除了加速度計(jì)與陀螺儀的軸間敏感度,降低了人為設(shè)定產(chǎn)生的影響與傳感器的漂移。內(nèi)含數(shù)字運(yùn)動(dòng)處理(DMP: Digital Motion Processing)引擎,可減少?gòu)?fù)雜的融合演算數(shù)據(jù)、傳感器同步化、姿勢(shì)感應(yīng)等的負(fù)荷。MPU-6050芯片連接電路如圖4所示。
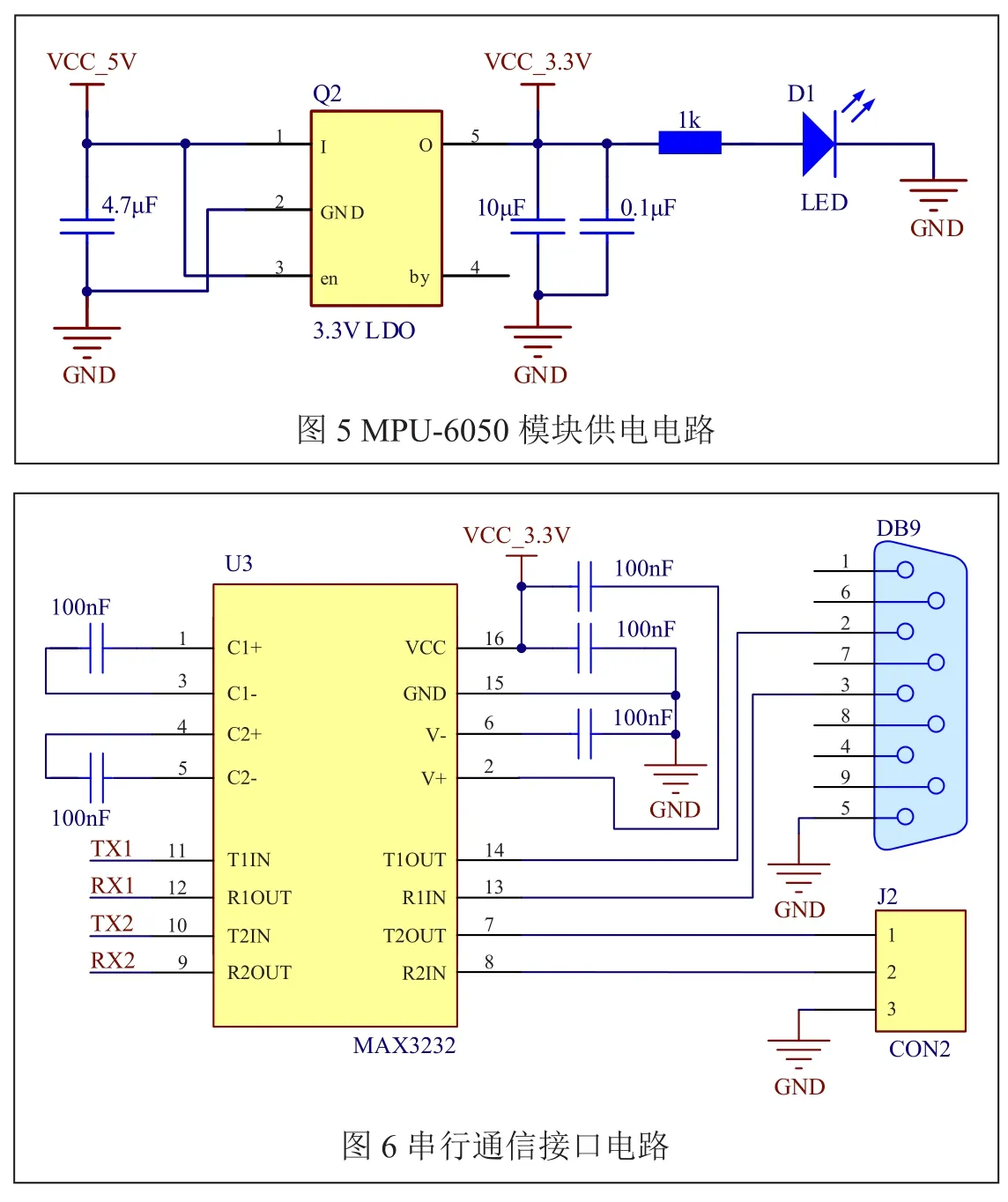
MPU-6050的供電電壓為3.3V,通過(guò)一個(gè)低壓差線性穩(wěn)壓器供電,電路圖如圖5所示。
3、串口通信模塊
為了將計(jì)算得到的運(yùn)動(dòng)體姿態(tài)信息顯示出來(lái),我們采用RS232 接口與PC機(jī)進(jìn)行交互通信。一方面,PC機(jī)實(shí)時(shí)接收運(yùn)動(dòng)體的加速度和角速度等參數(shù);另一方面,可通過(guò)PC機(jī)對(duì)測(cè)量系統(tǒng)的工作參數(shù)進(jìn)行補(bǔ)償設(shè)置。STM32103C8T6的最高工作電壓3.6V,但與RS232的電壓標(biāo)準(zhǔn)本不匹配,故而本系統(tǒng)采用MAX3232 芯片來(lái)實(shí)現(xiàn)電平轉(zhuǎn)換。串行通信接口電路如圖6所示。
四、系統(tǒng)軟件設(shè)計(jì)
1、姿態(tài)解算原理
運(yùn)動(dòng)體的姿態(tài)解算算法是實(shí)現(xiàn)運(yùn)動(dòng)體姿態(tài)精確測(cè)量的核心技術(shù)之一。目前描述動(dòng)態(tài)坐標(biāo)系方位關(guān)系的方法有多種,主要分為三個(gè)類別:歐拉角法、方向余弦法、四元數(shù)法。其中,歐拉角法存在“奇點(diǎn)”現(xiàn)象,不能用于全姿態(tài)運(yùn)動(dòng)載體上,且實(shí)時(shí)計(jì)算較為困難。方向余弦法雖然避免了歐拉角法的“奇點(diǎn)”現(xiàn)象,但方程的計(jì)算量較大,使得工作效率降低[3]。相比于前兩類方法,四元數(shù)法能更加合理有效地描述載體的剛體空間運(yùn)動(dòng),因此本系統(tǒng)選用四元數(shù)法進(jìn)行姿態(tài)解算。
四元數(shù)微分方程的表達(dá)式為:

其中,Ωb—運(yùn)動(dòng)體坐標(biāo)系相對(duì)地理坐標(biāo)系的旋轉(zhuǎn)角速度的斜對(duì)稱矩陣。
式(1)可擴(kuò)展為:
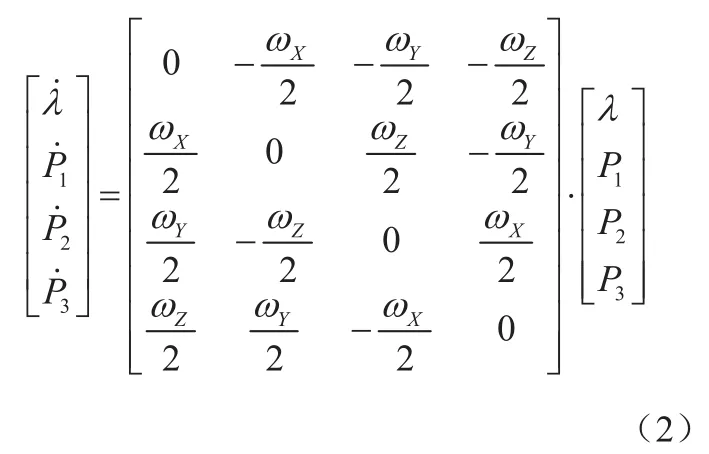
其中,λ、P1、P2、P3—四元數(shù)的四個(gè)元;
ω—運(yùn)動(dòng)載體坐標(biāo)系相對(duì)參考坐標(biāo)系的旋轉(zhuǎn)角速度,且有:

采用和矩陣微分方程式求解相似的方法,求得:

其中,I—單位四元數(shù)。
(3)式為四元數(shù)微分方程式的解, 且有:
通過(guò)矩陣實(shí)時(shí)計(jì)算,由四元數(shù)可確定出運(yùn)動(dòng)體機(jī)體軸確定的坐標(biāo)系M到導(dǎo)航坐標(biāo)系E的坐標(biāo)變換矩陣:
設(shè)運(yùn)動(dòng)體的航向角為Ψ,俯仰角為θ,橫滾角為γ,選取導(dǎo)航坐標(biāo)系為地理坐標(biāo)系,地理坐標(biāo)系可由三次基本旋轉(zhuǎn)得到運(yùn)動(dòng)體的機(jī)體坐標(biāo)系,其坐標(biāo)變換矩陣為:

通過(guò)式(7)和式(8)可得:

通過(guò)上述分析可知:若表征坐標(biāo)系變換的旋轉(zhuǎn)四元數(shù)以確定,則按式(6)可計(jì)算出姿態(tài)矩陣,再按式(9)即可確定出運(yùn)動(dòng)體的航向角、俯仰角和橫滾角[4~7]。
2、系統(tǒng)主程序設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)的主程序流程圖如圖7所示。首先進(jìn)行的是系統(tǒng)初始化,主要任務(wù)有確定運(yùn)動(dòng)體的初始信息,如初始位置、初始速度等;數(shù)學(xué)平臺(tái)的初始對(duì)準(zhǔn),以確定姿態(tài)矩陣的初始值;慣性器件的初始校準(zhǔn),對(duì)MPU-6050的各標(biāo)度因數(shù)進(jìn)行標(biāo)定。然后進(jìn)行姿態(tài)矩陣的更新計(jì)算,以提供運(yùn)動(dòng)體姿態(tài)以及計(jì)算姿態(tài)參數(shù)時(shí)的必要數(shù)據(jù),這是算法中最重要的一部分。最后進(jìn)行姿態(tài)計(jì)算,以獲取個(gè)姿態(tài)參數(shù),并對(duì)獲得的參數(shù)進(jìn)行提取驗(yàn)證。
五、測(cè)試結(jié)果及分析
本系統(tǒng)的測(cè)試過(guò)程是通過(guò)SGT320E型三軸轉(zhuǎn)臺(tái)來(lái)完成的,如圖8所示,它是U—O—O結(jié)構(gòu),即臺(tái)體由U形外框、O形中框以及O形內(nèi)框組成,三軸均可連續(xù)無(wú)限旋轉(zhuǎn),既可單軸旋轉(zhuǎn)也可多軸旋轉(zhuǎn),它可以精確地提供系統(tǒng)在工作期間可能經(jīng)受的各種形式的角運(yùn)動(dòng)模式。當(dāng)轉(zhuǎn)臺(tái)采用本機(jī)控制方式時(shí),三軸均具有速率模式、位置模式和正弦擺動(dòng)模式,通過(guò)串口仿真控制轉(zhuǎn)臺(tái)以設(shè)定的方式轉(zhuǎn)動(dòng),可為待測(cè)系統(tǒng)提供更為復(fù)雜的仿真測(cè)試環(huán)境。

本系統(tǒng)的測(cè)試方法為設(shè)定三軸轉(zhuǎn)臺(tái)的旋轉(zhuǎn)速率為10°/s和20°/s 對(duì)系統(tǒng)分別進(jìn)行兩次測(cè)量,得到兩組測(cè)量數(shù)據(jù),測(cè)量過(guò)程中各方向角單獨(dú)測(cè)量,其他方向角置零位。俯仰角和橫滾角的測(cè)量范圍都是-90°~+90°,每10°一測(cè),航向角的測(cè)量范圍是0°~360°,每20°一測(cè)。經(jīng)過(guò)測(cè)量得到俯仰角,橫滾角,航向角的測(cè)量數(shù)據(jù),各角度誤差如圖9、圖10、圖11所示,其中測(cè)量數(shù)據(jù)中第一組轉(zhuǎn)臺(tái)旋轉(zhuǎn)速率為10°/s,第二組轉(zhuǎn)臺(tái)旋轉(zhuǎn)速率為 20°/s 。
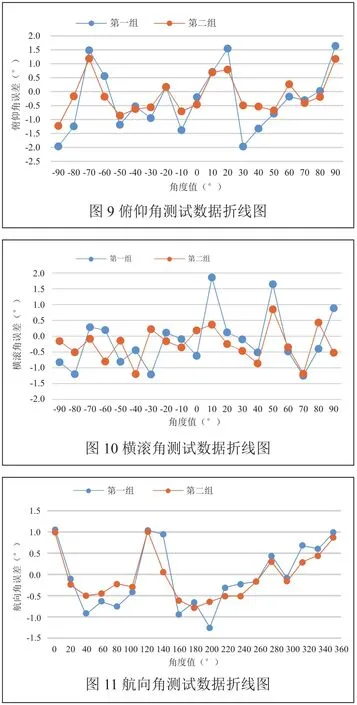
通過(guò)測(cè)量數(shù)據(jù)可知,系統(tǒng)俯仰角測(cè)量的角度誤差基本保持在±2°以內(nèi),橫滾角測(cè)量的角度誤差除個(gè)別點(diǎn)以外基本保持在±1.5°以內(nèi),航向角測(cè)量的角度誤差則較好地保持在±1.5°以內(nèi),且在轉(zhuǎn)臺(tái)不同的轉(zhuǎn)動(dòng)速率下,轉(zhuǎn)動(dòng)速率對(duì)系統(tǒng)的測(cè)量有一定影響,但測(cè)量誤差基本都保持在一定的誤差范圍內(nèi)。可見(jiàn),系統(tǒng)對(duì)運(yùn)動(dòng)體姿態(tài)角度的檢測(cè)具有較好的測(cè)量效果,系統(tǒng)設(shè)計(jì)可行。
六、結(jié)束語(yǔ)
本文應(yīng)用慣性傳感器模塊MPU-6050,設(shè)計(jì)了一款高性價(jià)比、高穩(wěn)定性、低功耗的運(yùn)動(dòng)體姿態(tài)角度測(cè)量系統(tǒng),可實(shí)時(shí)測(cè)量顯示運(yùn)動(dòng)體各姿態(tài)角的角度。實(shí)驗(yàn)結(jié)果顯示,該系統(tǒng)測(cè)量角度較為準(zhǔn)確,在各姿態(tài)角的測(cè)量過(guò)程中,最大測(cè)量誤差不超過(guò)2°,且系統(tǒng)測(cè)量穩(wěn)定性較高,達(dá)到了系統(tǒng)設(shè)計(jì)的測(cè)量目的。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
