基于SimuLink的模糊PID控制器設計及仿真
2016-12-02 14:27:53張志超崔天時馮兆宇張楨
物聯網技術 2016年8期
張志超 崔天時 馮兆宇 張楨

摘 要:傳統的PID控制器具有算法簡單、控制精度高的特點,但對于存在隨機干擾和滯后的系統無法獲得滿意的控制效果,而模糊控制器具有能適應被控對象非線性和時變性的優點,但控制精度不高。因此,文中將模糊控制和PID控制結合起來設計了一個模糊PID 控制器,并利用Matlab工具中的SimuLink工具箱進行了仿真,結果表明模糊PID控制器比傳統的PID控制器具有更優良的動態性能及魯棒性。
關鍵詞:模糊控制;PID控制;SimuLink仿真;Matlab
中圖分類號:TP391 文獻標識碼:A 文章編號:2095-1302(2016)08-00-02
0 引 言
PID控制器是最早發展起來的控制策略之一,由于其具有控制算法簡單、魯棒性能好、可靠性高[1]的特點,被廣泛應用到工業過程控制中,但對于難以建立精確數學模型的控制對象,應用傳統的PID不能達到理想的控制效果。而模糊控制是以模糊集合論、模糊語言變量和模糊邏輯推理為基礎的一種計算機控制方法[2],作為智能控制的一個重要分支,在控制領域獲得了廣泛應用,可以用模糊控制器調整PID控制器的參數,充分發揮模糊控制器和PID控制器的優點,使系統達到最佳的控制效果。本文對模糊PID控制器進行了設計并仿真。
1 模糊PID控制器的設計
1.1 控制器結構設計
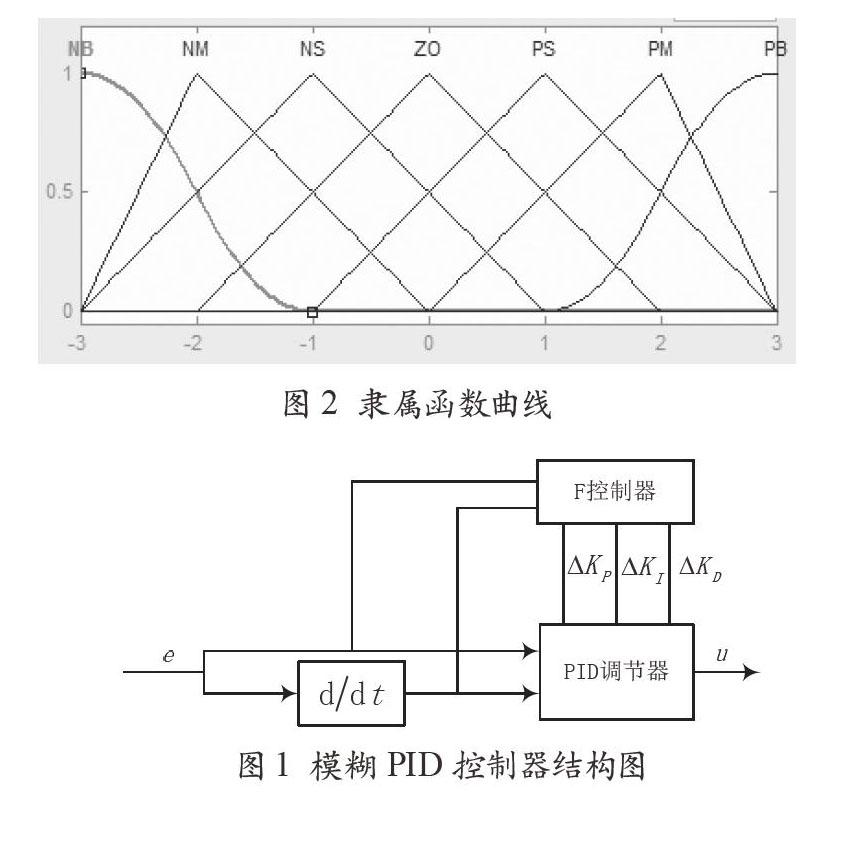
模糊PID控制器由模糊推理和PID控制器兩部分組成[3]。其結構如圖1所示。
其原理是把輸入PID調節器的偏差e和偏差變化率de/dt同時輸入到模糊控制器中,對3個參數KP、KI、KD進行調節,經過模糊化、近似推理和清晰化后,把得到的修正量ΔKP、ΔKI、ΔKD分別輸入PID調節器中,對三個系數進行實時在線修正。其中模糊控制器采用二維的Mamdani控制器,模糊控制決策采用Max-Min,解模糊采用重心法[4]。
1.2 模糊控制器控制算法的確立
1.2.1 模糊控制器中各變量隸屬函數的確定
該模糊控制器以|e|和|ec|為輸入語言變量, 以ΔKP、ΔKI和ΔKD為輸出語言變量。其輸入和輸出語言變量的模糊子集均為{NB,NM,NS,ZO,PS,PM,PB}[5], 它們的隸屬函數曲線如圖2所示。其中E,EC的論域是[-3,3],KP、KI、KD的論域分別為[-0.3 ,0.3],[-0.06,0.06] ,[-3,3],除了NB的隸屬函數是zmf函數外,其它均為trimf函數。隸屬函數曲線如圖2所示。
1.2.2 模糊控制器中模糊控制規則的建立
根據經驗結合理論分析可以歸納出偏差e、偏差變化率ec跟PID調節器的三個參數KP、KI、KD之間的關系[6,7]如下:
(a) 當|e|較大時,為了使系統具有較好的跟蹤性能,應取較大的KP和較小的KD, 同時為避免出現較大的超調,應對積分作用加以限制,通常取KI=0 。
(b) 當|e|中等大小時,為了使系統具有較小的超調,KP應小些。在這種情況下, KD取值大小對系統影響較大,應小一些,KI的取值要適當。
(c) 當|e|較小時,為了使系統具有較好的穩定性能,KP和KI均應大些。同時,為了避免系統在設定值出現振蕩,并考慮系統的抗干擾性能,當|ec|較大時,KD可取小些,當|ec|較小時,KD可取大些。
基于以上總結的輸入變量e與三個參數KP、KI、KD間的定性關系,結合工程技術人員的分析和實際操作經驗,考慮偏差變化率|ec|的影響,得出調節修正PID調節器三個參數的模糊規則如下:
2 模糊PID控制器仿真及比較分析
利用Matlab中的SimuLink和Fuzzy工具箱建立傳統PID和模糊PID的仿真系統[8-10]如圖4所示,設被控對象系統傳遞函數為:G(s)=1/s2。
傳統PID和模糊PID仿真階躍響應如圖5所示。
由仿真結果可知,模糊PID與傳統PID相比,響應速度更快,幾乎沒有超調,調整時間較短,且控制精度更高。
3 結 語
本文通過在Matlab工具箱中的SimuLink對模糊PID控制和傳統PID控制進行了建模仿真,仿真結果表明,使用模糊控制器來實時對PID參數進行調整,與傳統PID相比,獲得了更好的動態性能和穩態性能,魯棒性更好。
參考文獻
[1] 丁堅.模糊PID控制器的研究[D].哈爾濱:哈爾濱工程大學,2009.
[2] 石新民,郝整清.模糊控制及其MATALB仿真[M].北京:清華大學出版社,2008:53-125.
[3] 張鐳,李浩.四旋翼飛行器模糊PID姿態控制[J].計算機仿真,2014,31(8):73-77.
[4] 竇艷艷,錢蕾,馮金龍.基于Matlab的模糊PID控制系統設計及仿真[J].電子科技,2015, 28(2):119-122.
[5] 何鵬.基于Matlab 的模糊PID控制器設計與仿真研究[J].微型電腦應用,2010,26(4):59-60.
[6] 孫增圻.智能控制理論與技術[M].北京:清華大學出版社,1996.
[7] 李向明,陳紅珍,劉明蘭.自校正自調整PID模糊控制器仿真研究[J].武漢理工大學學報(信息與管理工程版),2003,25(3):74-77.
[8] 張志涌,楊祖櫻.MATLAB教程[M].北京:北京航空航天大學出版社,2010.
[9] 劉金琨.先進PID控制MATLAB仿真[M].北京:電子工業出版社,2011.
[10] 胡壽松.自動控制原理[M].北京:科學出版社,2008.