漫反射光電開關在除草機器人中的應用
2016-12-05 01:50:22
傳感器世界 2016年5期
一、引言
光電開關是一種利用光的強弱變化實現(xiàn)電的變化的一種傳感器,主要用來檢測遮擋物體。由于光電開關具有光電隔離的特性,所以它可以應用在各種工業(yè)控制領域中。
光電開關是一種數(shù)字量輸出的光電傳感器,主要用于控制系統(tǒng)。智能除草機器人是農(nóng)作物健康生長的重要組成部分,運用了光學,機電,電氣等光電學原理,自動化程度較高。把光電開關廣泛應用于農(nóng)業(yè)除草機器人中,保證了除草機器人除草的安全,高效,也保證了農(nóng)作物的生長不受雜草影響,茁壯成長。
二、光電開關的工作原理
光電開關是光電接近開關的簡稱,它首先把被測量的變化轉(zhuǎn)換成光信號的變化,然后借助光電元件進一步將光信號轉(zhuǎn)換為電信號。光電開關由發(fā)送器、接收器和檢測電路三部分組成。發(fā)射器向著一定的方向不斷地發(fā)射光束,發(fā)射的光束來源于發(fā)光二極管、紅外發(fā)射二極管等半導體光源,接收器由光電二極管、光電三極管等組成。光學元件裝在接收器前面,而在接收器后面是檢測電路,能夠濾出有效信號,并且應用此信號。另外為了防止外界可見光的干擾,光電開關還輔助有發(fā)射板,反光板和光導纖維[1]。
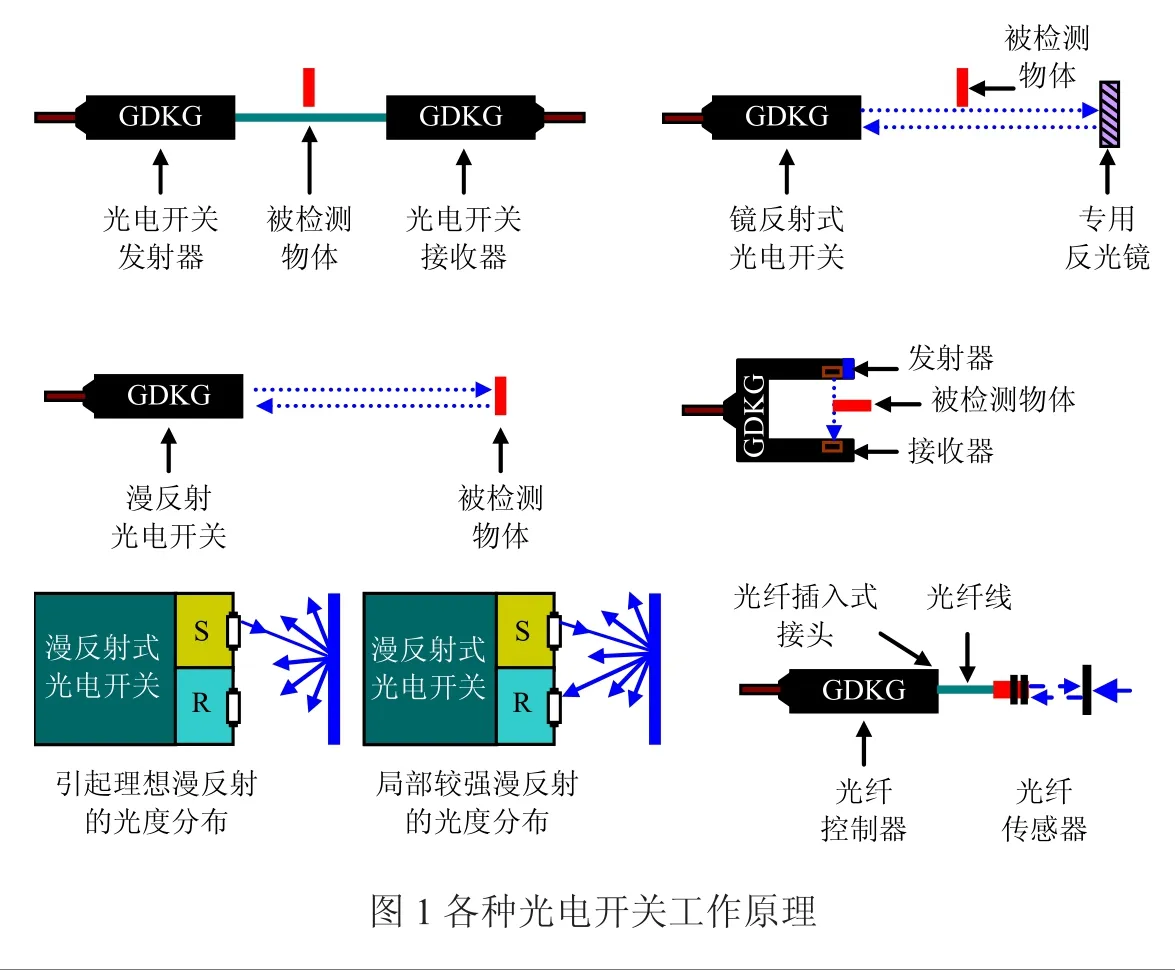
它是利用被檢測物對光束的遮擋或反射,由同步回路選通電路,從而檢測遮擋物體的有無。所有能反射光線的物體均可被檢測,光電開關將輸入電流在發(fā)射器上轉(zhuǎn)換為光信號射出,接收器在根據(jù)接收到的光線強弱或有無對目標物體進行檢測[2],各種光電開關的工作原理如圖1所示。
光電開關多種多樣,圖2是一種集發(fā)射和接收于一體的漫反射式紅外光電傳感器,發(fā)射器發(fā)出信號,接收器通過不透明物體的反射光來接收信號,從而產(chǎn)生一個開關變化;另外可以通過電位器調(diào)節(jié)檢測距離在3cm~80cm。該傳感器具有探測距離可調(diào),受可見光干擾小,價格便宜,易于裝配,使用方便等優(yōu)點,可以廣泛應用于機器人避障,流水線計件等眾多場合。
三、光電開關的分類
光電開關的型號種類很多。按結構分主要可以分為三種。
第一種是放大器分離型,顧名思義就是將放大器和傳感器分離,并采用專用集成電路和混合安裝工藝制成,此類放大器的功能較多,并可交直流電源通用;
而第二種是放大器內(nèi)藏型,它將傳感器和放大器集成一體化,采用專用集成電路和表面安裝工藝制成,使用直流電源工作,另外在系統(tǒng)中安裝方便,能檢測狹小和高速運動的物體;
第三種則是電源內(nèi)藏型,則是將電源裝置與放大器、傳感器一體化,采用專用集成電路和表面安裝工藝制成。它適用于交流電源,可直接用于控制強電電路[3]。
按檢測方式分可以分為漫射式、對射式、鏡面反射式、光纖式光電開關和槽式光電開關。對射式光電開關由結構相互隔離的發(fā)射器和接收器組成,主要檢測光束是否被中斷,如果被中斷,就會產(chǎn)生一個開關信號變化;對射式光電開關在同一軸線是最大距離可以達到50m。鏡面反射式和槽式光電開關的工作原理與對射式光電開關一樣,也是通過光束被隔斷產(chǎn)生一個開關信號的變化。但是他們各有特點,鏡面反射可以辨別不透明物體,有效距離范圍遠,不易受干擾。槽式光電開關比較安全可靠的檢測高速變化,分辨透明和半透明物體[4,5]。而漫反射式光電開關是當開關發(fā)射光束時,目標產(chǎn)生漫反射,當有足夠的組合光返回接收器時,開關狀態(tài)才會發(fā)生變化,作用距離典型值一般為3m,此類光電開關應用廣泛。
四、光電開關的優(yōu)缺點
1、優(yōu)點
(1)分辨率高。能通過特殊的光學系統(tǒng)進行微小物體的檢測和位置判別;
(2)響應時間短。由于發(fā)射接受信號的都是光速,因此觸發(fā)動作幾乎無延時;
(3)實現(xiàn)非接觸檢測。無需機械式接觸來檢測物體,不會對檢測物和傳感器造成損傷;
(4)便于調(diào)節(jié)。通過集成電路技術和特殊工藝把光電開關做到通過調(diào)節(jié)電位器來調(diào)節(jié)檢測距離。
2、缺點
缺點是消耗功率和故障率比霍爾器件要大,可以通過調(diào)整檢測距離以降低由于自身功率的限制造成的錯誤信號。
五、光電開關在農(nóng)業(yè)除草機器人中的應用
1、除草機器人的組成

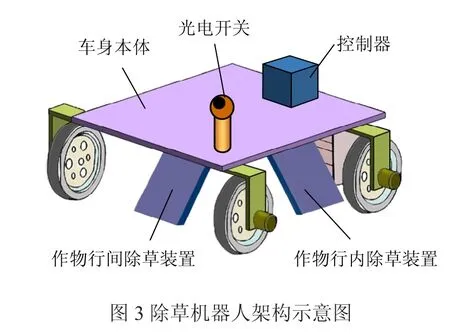
除草機器人由車身本體,控制器,行內(nèi)行間除草末端執(zhí)行器和光電開關組成。機器人沿著作物行直線行駛,遇到行內(nèi)和行間雜草時,放慢速度鏟除。具體過程如下:機器人首先沿著作物行直線行駛,驅(qū)動機器人行駛的部分由兩個直流伺服電機驅(qū)動前輪行駛,前輪和電機通過齒輪箱連接,采用差速轉(zhuǎn)向,后輪采用萬向輪,然后利用漫反射光電開關來檢測區(qū)分雜草和植株,可以實時檢測,定點鏟除行內(nèi)雜草。當識別到雜草時,控制行內(nèi)除草末端執(zhí)行器臂閉合,底部高速旋轉(zhuǎn)的刀盤嵌入土中,攪斷雜草根部,未識別到雜草時,行內(nèi)除草執(zhí)行器臂不動作,刀盤做空轉(zhuǎn)。同時,行間除草末端執(zhí)行器由滾輪和滾齒組成,滾齒高速旋轉(zhuǎn)切割行間雜草[6],這樣能夠使除草機器人在行駛過程中高速地進行行內(nèi)、行間除草。除草機器人整體架構如圖3所示。
2、光電開關在除草機器人中的應用
(1)等間距種植植株來除草
為了能使植株生長互相不受影響,也可更好的區(qū)分植株和雜草,采用機械播種的方法進行種植植物,每一行植株,每一列植株間距基本相等,但是由于在實際播種過程中,受到各種因素的影響,植株的實際位置和理想位置有所偏差,所以我們設定了如下判定方法:把植株區(qū)域設定為理想植株方圓3cm范圍,在此區(qū)域內(nèi)都確定為植株,在植株區(qū)域以外都認為是雜草,這樣可以避免累計誤差出現(xiàn),又可避免錯誤識別而誤鏟植株。
(2)利用高度來區(qū)分植株和雜草
當植株高度遠遠大于雜草高度時,就可采用光電開關檢測植株高度來區(qū)分植株和雜草。此方法要把光電開關安裝在植株高度以內(nèi)以便檢測到植株,并且在雜草高度以上以防止檢測到雜草產(chǎn)生誤動作,當光電開關檢測到有物體時,說明植株已使光電開關產(chǎn)生信號,行內(nèi)除草執(zhí)行器臂不動作,放過植株;反之,說明沒有植株,就可驅(qū)動除草執(zhí)行器工作,鏟除雜草。
(3)利用植株的形狀來區(qū)分
當雜草高度和植株高度相當時,這里就采用分析植株的一般形狀來區(qū)分植株和雜草。具體過程如下:首先按照植株的形狀在適當?shù)母叨群头轿话仓萌舾蓚€光電開關,以便檢測植株,并記錄光電開關接收器疊加輸出的二進制脈沖,二進制脈沖等級設定一個閾值,通過單片機編程控制區(qū)分植株和雜草。如果大于這個閾值,說明是植株,反之,則是雜草。
六、結論
本文提出了一種漫反射光電開關在除草機器人中的應用。使用價格低廉的光電開關來替代昂貴的攝像頭來識別行內(nèi)雜草,大大降低了成本。另外也不需要做圖像處理的算法,只需要簡單的控制。
但是光電開關也有其自身的局限性,單個光電開關只能檢測被檢測物的有無,無法區(qū)分物體的形狀,顏色,大小以及其他特征,因此要通過集成電路和光學器件結合改變光電開關內(nèi)部結構進行研究開發(fā)。
猜你喜歡
科教新報(2022年22期)2022-07-02 12:34:28
今日農(nóng)業(yè)(2021年5期)2021-11-27 17:22:19
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
高中生學習·閱讀與寫作(2019年2期)2019-09-10 07:22:44
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
現(xiàn)代農(nóng)業(yè)(2015年5期)2015-02-28 18:40:49