基于拉格朗日建模的兩軸穩(wěn)定平臺(tái)耦合干擾分析
2016-12-09 06:55:32賈繼紅宋江鵬
軍事交通學(xué)院學(xué)報(bào) 2016年11期
賈繼紅,宋江鵬
(1.軍事交通學(xué)院 軍事物流系,天津 300161; 2.哈爾濱工業(yè)大學(xué) 航天學(xué)院,哈爾濱 150001)
?
基于拉格朗日建模的兩軸穩(wěn)定平臺(tái)耦合干擾分析
賈繼紅1,宋江鵬2
(1.軍事交通學(xué)院 軍事物流系,天津 300161; 2.哈爾濱工業(yè)大學(xué) 航天學(xué)院,哈爾濱 150001)
為研究載體與內(nèi)外框架之間的耦合關(guān)系,基于拉格朗日方程,建立包括摩擦力矩模型和質(zhì)量不平衡力矩模型的完整穩(wěn)定平臺(tái)動(dòng)力學(xué)模型。同時(shí)根據(jù)所建立兩軸穩(wěn)定平臺(tái)動(dòng)力學(xué)模型進(jìn)行仿真分析,明確各種耦合力矩對(duì)控制性能的影響。仿真結(jié)果表明:與框架間耦合力矩相比,載體運(yùn)動(dòng)對(duì)光軸穩(wěn)定的影響較大;外框架控制系統(tǒng)設(shè)計(jì)需要考慮轉(zhuǎn)動(dòng)慣量、摩擦力矩干擾和幾何約束角速度干擾帶來的影響,應(yīng)具有較強(qiáng)魯棒性。
拉格朗日建模;耦合干擾;摩擦力矩;幾何約束
兩軸光電穩(wěn)定平臺(tái)是動(dòng)載體光電成像穩(wěn)定裝置中較為常見的一種結(jié)構(gòu)形式,技術(shù)較為成熟,但其運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型仍是一個(gè)存在軸間運(yùn)動(dòng)耦合和非線性干擾的非線性控制系統(tǒng)[1],建立完整的運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)模型和進(jìn)行全面的耦合力矩分析是高精度穩(wěn)定平臺(tái)機(jī)械系統(tǒng)和控制系統(tǒng)設(shè)計(jì)的基礎(chǔ)。本文以常規(guī)兩軸方位-俯仰框架穩(wěn)定平臺(tái)為研究對(duì)象,采用表達(dá)式非常簡(jiǎn)潔的拉格朗日方程對(duì)其建模,避免了歐拉方程動(dòng)力學(xué)建模過程中存在的大量動(dòng)量矩矢量變換的復(fù)雜推導(dǎo)過程。同時(shí),在推導(dǎo)過程中考慮了摩擦力矩,并將兩軸光電穩(wěn)定平臺(tái)的運(yùn)動(dòng)學(xué)特性、動(dòng)力學(xué)特性和框架電機(jī)的特性結(jié)合起來,建立更具有普遍意義的控制模型[2]。分析摩擦力矩、幾何約束角速度等因素對(duì)穩(wěn)定平臺(tái)的不同耦合途徑,將穩(wěn)定平臺(tái)作為一個(gè)整體進(jìn)行全面分析,并針對(duì)實(shí)際數(shù)據(jù)進(jìn)行仿真分析,從而為光電穩(wěn)定平臺(tái)控制系統(tǒng)設(shè)計(jì)和控制性能分析提供理論基礎(chǔ)和參考模型。
1 坐標(biāo)系定義
(1)載體坐標(biāo)系Omxmymzm。原點(diǎn)一般位于載體質(zhì)心。Omxm軸沿載體縱軸向前,軸在載體縱對(duì)稱面內(nèi)向上,Omzm軸按Omym右手系定義方向。
(2)外框坐標(biāo)系Ooxoyozo。原點(diǎn)位于內(nèi)、外框連接部分的幾何中心點(diǎn)。Ooyo軸與穩(wěn)定平臺(tái)外框架方位軸重合,向上為正,其余兩軸符合右手定則。采用方位角λy表示外框架理想旋轉(zhuǎn)角。
(3)內(nèi)框坐標(biāo)系Oixiyizi。原點(diǎn)位于內(nèi)、外框連接部分的幾何中心點(diǎn)。Oizi軸與穩(wěn)定平臺(tái)內(nèi)框架俯仰軸重合,Oixi與探測(cè)器光軸重合,指向目標(biāo)為正。Oiyi符合右手定則。采用俯仰角λz表示內(nèi)框架理想旋轉(zhuǎn)角。
2 穩(wěn)定平臺(tái)運(yùn)動(dòng)學(xué)模型推導(dǎo)
設(shè)定載體坐標(biāo)系慣性運(yùn)動(dòng)角速度矢量為
ωb=[ωbxωbyωbz]T
外框架坐標(biāo)系慣性運(yùn)動(dòng)角速度矢量為
ωo=[ωoxωoyωoz]T
內(nèi)框架坐標(biāo)系慣性運(yùn)動(dòng)角速度矢量為
ωi=[ωixωiyωiz]T
(1)
(2)
式(1)、式(2)中:c表示cos,s表示sin,下同。
根據(jù)載體和穩(wěn)定平臺(tái)框架運(yùn)動(dòng)關(guān)系可知外框架慣性運(yùn)動(dòng)角速度為
(3)

同理,內(nèi)框架慣性空間角速度為
(4)

內(nèi)框架慣性空間角速度是載體運(yùn)動(dòng)、外框架運(yùn)動(dòng)以及內(nèi)框架自身運(yùn)動(dòng)的合成,由于成像探測(cè)器安裝于內(nèi)框架上,內(nèi)框架的運(yùn)動(dòng)方程就是光軸運(yùn)動(dòng)方程。
3 動(dòng)力學(xué)推導(dǎo)及耦合分析
3.1 穩(wěn)定平臺(tái)動(dòng)力學(xué)模型推導(dǎo)
本文借鑒文獻(xiàn)[3-5]對(duì)質(zhì)量不平衡力矩和摩擦力矩的分析方法,采用第二類拉格朗日方程,在考慮摩擦力矩干擾和質(zhì)量不平衡力矩的條件下推導(dǎo)出兩軸穩(wěn)定平臺(tái)動(dòng)力學(xué)模型。
(5)
式中:T為系統(tǒng)動(dòng)能;D為系統(tǒng)瑞利耗散函數(shù);qk為系統(tǒng)廣義坐標(biāo);k為系統(tǒng)獨(dú)立的自由度個(gè)數(shù);Qk為系統(tǒng)的廣義力。剛體旋轉(zhuǎn)運(yùn)動(dòng)的動(dòng)能為ω·H/2[8],剛體平移運(yùn)動(dòng)的動(dòng)能為m·v2/2。根據(jù)剛體旋轉(zhuǎn)運(yùn)動(dòng)和平移運(yùn)動(dòng)的動(dòng)能的計(jì)算公式以及式(4)、式(5),可得平臺(tái)兩個(gè)框架的總動(dòng)能T為


式中:Jx、Jy、Jz為框架主轉(zhuǎn)動(dòng)慣量;Jxy、Jyz、Jxz為框架慣性積。
同時(shí),考慮穩(wěn)定平臺(tái)框架軸上的摩擦力矩影響,本文選擇經(jīng)典的庫(kù)侖+粘滯摩擦模型,推導(dǎo)系統(tǒng)的能量耗散函數(shù)為[6]

(6)
式中:Kov、Kiv分別為外框架和內(nèi)框架的粘滯摩擦系數(shù);Toc、Tic分別為外框架和內(nèi)框架的庫(kù)侖摩擦力矩。
選取合適的廣義坐標(biāo)是建模的關(guān)鍵,本文選取兩框架相對(duì)角度λy、λz以及兩框架質(zhì)心位置ρox、ρoz和ρix、ρiy為廣義坐標(biāo),則由式(5)、式(6)可得到平臺(tái)的動(dòng)力學(xué)方程為
(7)
由式(6)、式(7)可得外框架摩擦力矩Mfy和內(nèi)框架摩擦力矩Mfz分別為
(8)
(9)
同時(shí),外框架質(zhì)量不平衡力矩Muy和內(nèi)框架質(zhì)量不平衡力矩Muz分別為
Muy=ρozFox-ρoxFoz=m(ρozaox-ρoxaoz)
(10)
Muz=ρixFiy-ρiyFiz=m(ρixaiy-ρiyaix)
(11)
3.2 耦合分析
根據(jù)式(5) ~式(11),得俯仰軸動(dòng)力學(xué)方程為

(12)
式中:Js為外框架等效轉(zhuǎn)動(dòng)慣量,且Js=Joy+Jixsin2λz+Jiycos2λz+Jixysin(2λz);Mcry為外框架線纜干擾力矩;My_cross為外框架軸間慣量耦合力矩,主要受到內(nèi)框架運(yùn)動(dòng)反作用力矩影響。
4 穩(wěn)定控制分析
4.1 穩(wěn)定平臺(tái)控制系統(tǒng)框圖
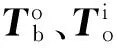
通過上一節(jié)中推導(dǎo)的兩軸穩(wěn)定平臺(tái)的運(yùn)動(dòng)學(xué)模型和動(dòng)力學(xué)模型,建立穩(wěn)定平臺(tái)控制系統(tǒng)的控制框圖(如圖1、圖2所示)[7]。
圖1、圖2中:Gv(s)為控制回路校正傳函;L為電機(jī)電感;R為電機(jī)內(nèi)阻;Kt為力矩系數(shù);Ke為反電勢(shì)系數(shù);Kf為反饋通道增益;J為內(nèi)框架轉(zhuǎn)動(dòng)慣量;Tf為非線性摩擦力矩。
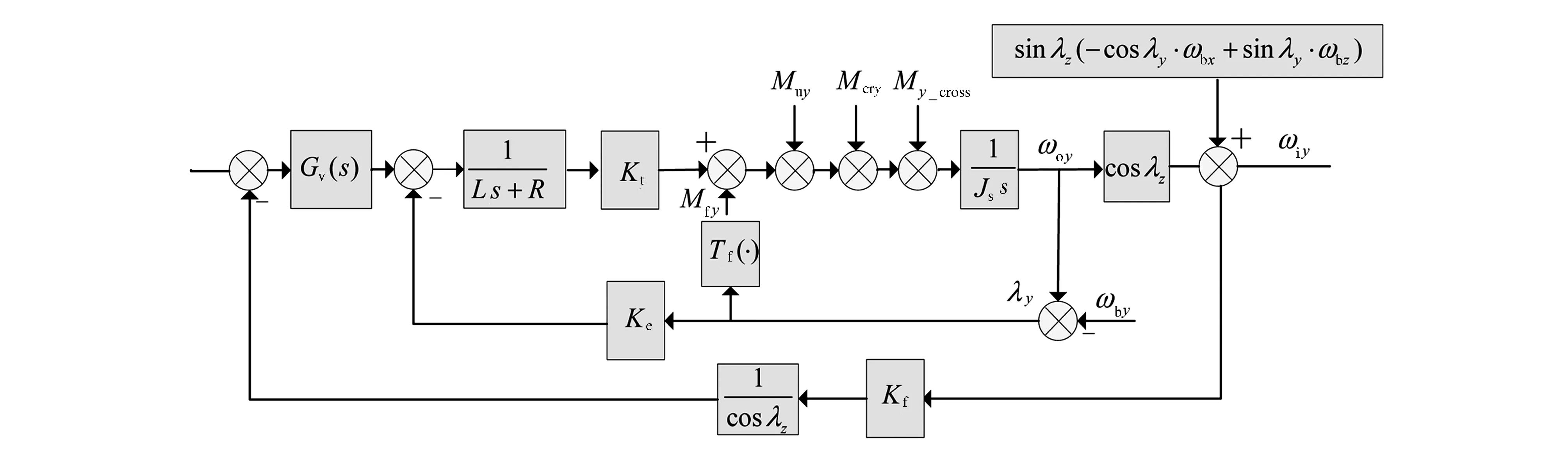
圖1 外框架穩(wěn)定平臺(tái)控制框圖
圖2 內(nèi)框架穩(wěn)定平臺(tái)控制框圖
4.2 摩擦力矩產(chǎn)生的耦合運(yùn)動(dòng)分析
為了定性分析摩擦力矩的影響,將方位框架摩擦力矩的非線性環(huán)節(jié)Tf(·)采用較簡(jiǎn)單的庫(kù)侖摩擦+粘滯摩擦模型進(jìn)行分析。
(13)
式中:Tc為庫(kù)侖摩擦系數(shù);Kv為粘滯摩擦系數(shù)。
采用線性分析方法建立載體擾動(dòng)ωby通過摩擦力矩耦合到光軸方位角速度ωiy的傳遞函數(shù):
(14)
將式(13)代入式(14),并忽略反電動(dòng)影響,求得傳函幅值:
(15)
式(14)、式(15)表征了載體擾動(dòng)通過摩擦力矩耦合對(duì)方位軸光軸角速度的影響。當(dāng)增加穩(wěn)定回路控制器值增益Gv(s)、提高負(fù)載轉(zhuǎn)動(dòng)慣量Js、內(nèi)框架俯仰角λz較大以及擾動(dòng)頻率ω較高時(shí),光軸方位方向?qū)δΣ亮財(cái)_動(dòng)的隔離能力較好。
4.3 幾何約束產(chǎn)生的耦合運(yùn)動(dòng)分析
載體擾動(dòng)以幾何約束方式對(duì)方位光軸慣性角速度產(chǎn)生影響。設(shè)定該載體擾動(dòng)項(xiàng)為ωbg=-ωbxcosλy+ωbzsinλy。建立載體擾動(dòng) 通過摩擦力矩耦合通道到光軸方位角速度ωiy傳遞函數(shù)如下:
(16)
該傳遞函數(shù)表征了載體擾動(dòng)通過幾何約束干擾對(duì)方位軸光軸角速度的影響。由式(16)可知,當(dāng)增加穩(wěn)定回路控制器值增益Gv(s)、提高負(fù)載轉(zhuǎn)動(dòng)慣量Js、內(nèi)框架俯仰角λz較小時(shí),方位光軸對(duì)幾何約束擾動(dòng)的隔離能力較好。
5 仿真與分析
某穩(wěn)定平臺(tái)框架設(shè)計(jì)參數(shù)見表1。
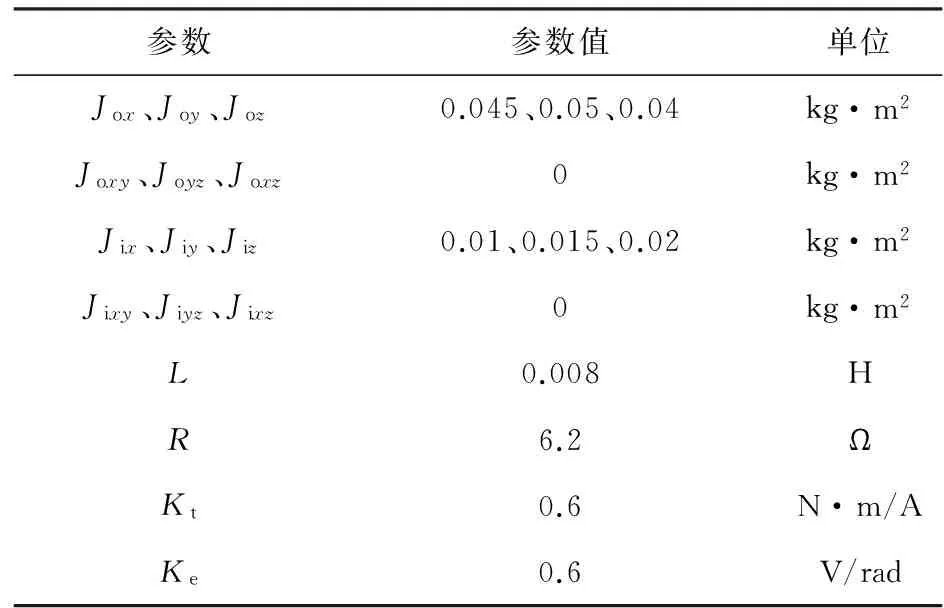
表1 模型參數(shù)
(1)設(shè)定載體運(yùn)動(dòng)在滾轉(zhuǎn)、俯仰、偏航方向存在幅值為2°、頻率2 Hz的正弦姿態(tài)擾動(dòng),作為兩軸穩(wěn)定平臺(tái)的輸入條件。兩軸穩(wěn)定平臺(tái)方位框架和俯仰框架均在零度角,不考慮質(zhì)量不平衡力矩以及導(dǎo)線干擾力矩的影響,方位軸和俯仰軸的慣量耦合力矩輸出仿真結(jié)果如圖3所示。圖3(a)是俯仰內(nèi)框架耦合的方位外框架等效轉(zhuǎn)動(dòng)慣量。圖3(b)是載體以及內(nèi)框架運(yùn)動(dòng)引起的外框架慣量耦合干擾力矩,顯然,該力矩很小,產(chǎn)生的影響一般可以不考慮。
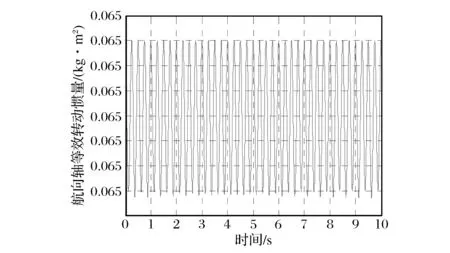
(a)
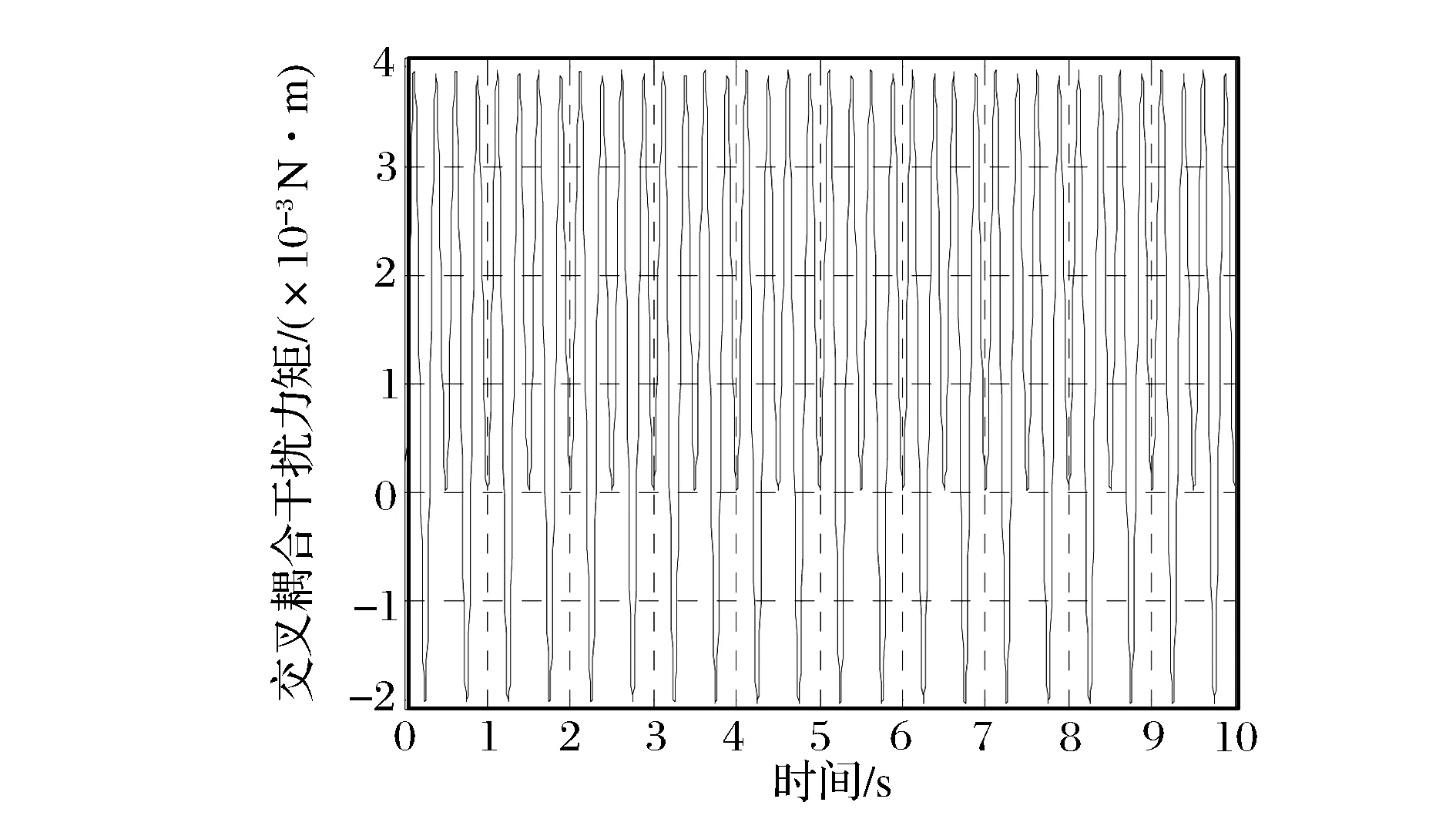
(b)圖3 方位框等效轉(zhuǎn)動(dòng)慣量和交叉耦合力矩
(2)設(shè)定載體運(yùn)動(dòng)在滾轉(zhuǎn)、俯仰、偏航方向存在幅值為2°、頻率2 Hz的正弦姿態(tài)擾動(dòng),不考慮質(zhì)量不平衡力矩以及導(dǎo)線干擾力矩的影響,內(nèi)框架俯仰角度由0°遞增至90°,外框架航向角度在零度角。如圖4(a)所示,隨著內(nèi)框架俯仰角度不斷增加,載體擾動(dòng)引起的摩擦力矩對(duì)光軸穩(wěn)定精度影響逐漸減小。
(3)設(shè)定載體在滾轉(zhuǎn)、俯仰、偏航方向存在幅值為2°、頻率從0~100 Hz的正弦姿態(tài)擾動(dòng),方位框架和俯仰框架均在零度角,如圖4(b)所示,隨著載體擾動(dòng)頻率的增加,載體擾動(dòng)引起的摩擦力矩對(duì)光軸穩(wěn)定精度影響呈先高后低趨勢(shì)。
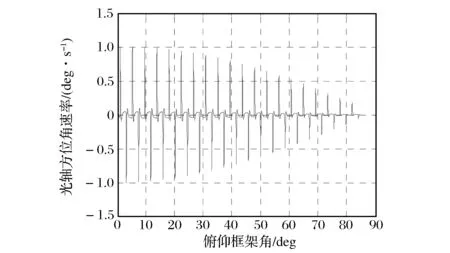
(a)
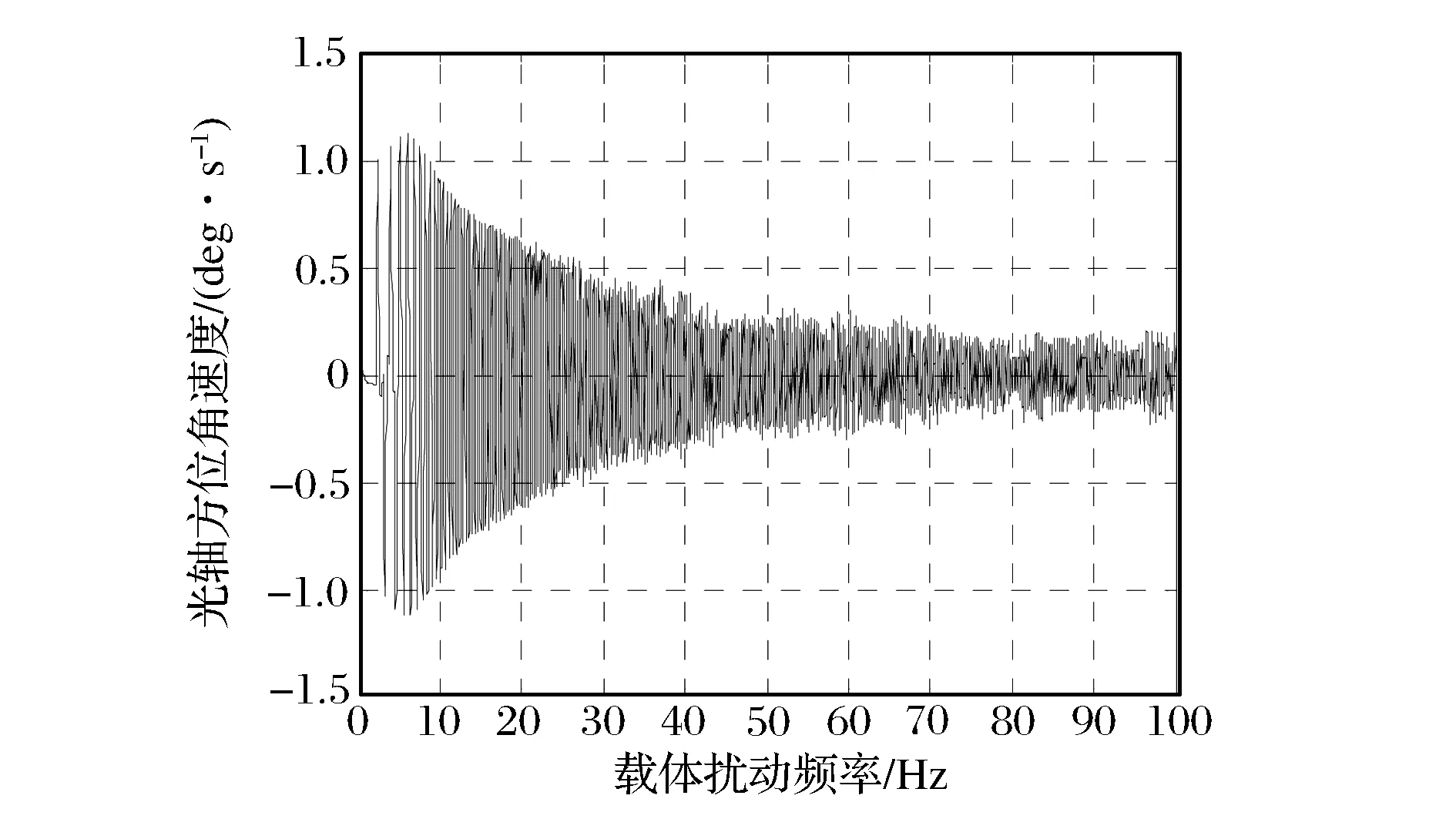
(b)圖4 摩擦力矩引起的光軸方位角速度值
6 結(jié) 論
(1) 影響穩(wěn)定平臺(tái)光軸穩(wěn)定精度的因素中,載體運(yùn)動(dòng)與框架間耦合力矩相比,對(duì)光軸穩(wěn)定的影響較大。
(2) 載體擾動(dòng)頻率越大,摩擦力矩對(duì)光軸穩(wěn)定精度的影響越小。
(3) 外框架的轉(zhuǎn)動(dòng)慣量為變轉(zhuǎn)動(dòng)慣量,在外框架控制系統(tǒng)設(shè)計(jì)和電機(jī)選型時(shí),需要通過測(cè)量或理論建模方式得到外框架轉(zhuǎn)動(dòng)慣量的變化范圍;同時(shí),外框架控制系統(tǒng)設(shè)計(jì)必須具有較強(qiáng)魯棒性。
[1] 華征. 成像導(dǎo)引頭伺服機(jī)構(gòu)若干基本問題研究[D].北京:國(guó)防科學(xué)技術(shù)大學(xué),2012.
[2] 董小萌,張平,付奎生.極坐標(biāo)捷聯(lián)式視覺導(dǎo)引平臺(tái)的機(jī)電建模與仿真[J].系統(tǒng)仿真學(xué)報(bào),2009,21(1):262-265.
[3] 朱華征,范大鵬,張文博,等.質(zhì)量不平衡力矩對(duì)導(dǎo)引頭伺服機(jī)構(gòu)性能影響分析[J].紅外與激光工程,2009,38(5):767-772.
[4] 陰蕊,房建成,鐘麥英. 航空遙感用三軸慣性穩(wěn)定平臺(tái)動(dòng)力學(xué)建模與仿真[J].中國(guó)慣性技術(shù)學(xué)報(bào),2011,19(6):676-680.
[5] 宋江鵬,孫廣利,周荻.偏軸反射鏡平臺(tái)視軸穩(wěn)定技術(shù)及建 模分析[J].紅外與激光工程,2015,44(8):2484-2490.
[9] 聶旭濤. 導(dǎo)引頭伺服機(jī)構(gòu)若干強(qiáng)度與動(dòng)力學(xué)問題研究[D]. 北京:國(guó)防科學(xué)技術(shù)大學(xué),2009.
[10] 鮑文亮,黃顯林,盧鴻謙. 多框架光電平臺(tái)動(dòng)力學(xué)建模及耦合分析[J].哈爾濱工程大學(xué)學(xué)報(bào),2009,30(8):893-897.
(編輯:史海英)
Coupling Disturbance of Two-axis Stabilization Platform Based on Lagrangian Modeling
JIA Jihong1, SONG Jiangpeng2
(1.Military Logistics Department, Military Transportation University, Tianjin 300161, China; 2.School of Astronautics, Harbin Institute of Technology, Harbin 150001, China)
To study the coupling relation between carrier and inner and outer framework, the paper establishes a complete stabilization platform dynamic model which includes friction and mass unbalance torque model based on lagrange equation, and makes simulation analysis according to this model and defines the impact of all kinds of coupling torque on control performance. The simulation result shows that carrier movement has greater influence on optical axis stability comparing to coupling torque between frameworks, and designing outer framework control system should have robustness and consider the influence factors such as variable moment of inertia, friction torque disturbance, and geometric constraints angular velocity interference.
lagrangian modeling; coupling disturbance; friction torque; geometric constraint
2016-03-14;
2016-06-06.
軍事交通學(xué)院科研基金項(xiàng)目(2016B52).
賈繼紅(1979—),女,碩士,講師.
10.16807/j.cnki.12-1372/e.2016.11.021
TP275
A
1674-2192(2016)11- 0091- 05
 軍事交通學(xué)院學(xué)報(bào)2016年11期
軍事交通學(xué)院學(xué)報(bào)2016年11期
- 軍事交通學(xué)院學(xué)報(bào)的其它文章
- 軍事交通運(yùn)輸大數(shù)據(jù)應(yīng)用研究
- 基于工業(yè)攝像技術(shù)的軸轉(zhuǎn)速轉(zhuǎn)矩測(cè)量系統(tǒng)設(shè)計(jì)與實(shí)驗(yàn)
- 部隊(duì)摩托化機(jī)動(dòng)微觀交通仿真模型參數(shù)校正
- 下承式梁拱組合體系橋結(jié)構(gòu)設(shè)計(jì)參數(shù)研究
- 模糊灰色關(guān)聯(lián)分析在戰(zhàn)儲(chǔ)維修器材品種優(yōu)化中的應(yīng)用
- 出動(dòng)強(qiáng)度約束下多機(jī)種(型)保障資源優(yōu)化配置