基于VISSIM仿真設置路內停車位的交通量條件
2016-12-12 07:52:34王運霞祖永昶
城市交通 2016年6期
李 婭,龔 翔,王運霞,祖永昶
(1.公安部交通管理科學研究所,江蘇無錫214151;2.無錫市規劃設計研究院,江蘇無錫214031)
基于VISSIM仿真設置路內停車位的交通量條件
李 婭1,龔 翔2,王運霞1,祖永昶1
(1.公安部交通管理科學研究所,江蘇無錫214151;2.無錫市規劃設計研究院,江蘇無錫214031)
路內停車位擠占道路空間資源,導致道路通行能力降低、交通安全存在隱患。有必要探究設置路內停車位的交通量條件,使整體停車效率最大化。以機非混行條件下的單幅路為研究對象,結合常州市路內停車調查數據,通過VISSIM仿真的方法研究設置路內停車位對路段交通流造成的影響。利用VISSIM建立路內停車模型,設定機動車飽和度為0.1至1.0(步長為0.05)、非機動車飽和度為0.1至1.0(步長為0.1),共模擬190個機非混行場景,分析不同飽和度條件下的機動車和非機動車車均延誤。參考交通影響評價中的長路段評價方法,選取其中的延誤率作為設置路內停車位后路段服務水平的評價指標,提出機非混行路段設置路內停車位的機動車和非機動車交通量條件。
城市交通;路內停車;設置條件;VISSIM仿真;交通量
0 引言
中國正處于機動化快速發展時期,機動車保有量年均增長速度在10%以上,但靜態交通設施的建設卻相對滯后,停車難問題在大中城市普遍存在。路內停車在整個停車體系中主要起補充作用,同時也是緩解近期停車難問題的重要手段。但是,路內停車位擠占道路空間資源,其導致的道路通行能力降低、交通安全隱患等問題也不可忽視。因此,在道路寬度條件一定的情況下,有必要探究設置路內停車位的交通量條件,使整體停車效益最大化。
國外對路內停車的仿真研究較為豐富,但是國內外交通流差異較大,中國不能直接照搬國外經驗。中國對路內停車的仿真研究較少:文獻[1]通過推導車均延誤—停車距離模型,提出路內停車路段與交叉口最佳距離的設置方法,并用VISSIM仿真對模型理論結果進行驗證;文獻[2]利用VISSIM仿真分析4種機—非干擾模式對路內停車設置的影響;文獻[3]針對設置路內停車位后對非機動交通行為的影響進行研究。
中國尚無專門針對路內停車的仿真軟件,本文結合中國大中城市交通流特點,綜合考慮幾款主流的交通仿真軟件,采用VISSIM仿真軟件對路內停車設置的有效性與適用性進行仿真驗證。
1 路內停車VISSIM建模
1.1 仿真對象和目的
路內停車對交通流的影響主要有兩個方面[4]:1)路內停車占用非機動車道,迫使非機動車向機動車道偏移或直接在機動車道上通行,形成機非混行狀態,增加路段沖突,使機動車流速度降低,這一過程被稱為摩擦效應;2)路內停車的駛入和駛出可能阻斷路段車流,尤其是當路段交通量較大時,駛入和駛出的車輛不會完全等待可穿越的機動車間隙,而是強行穿越,給路段上車輛造成很大干擾,嚴重時可能形成交通擁堵,這一過程被稱為阻滯效應。
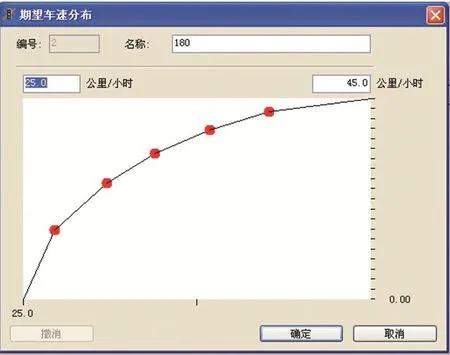
圖1 輸入速度參數Fig.1 Inputspeed parameters
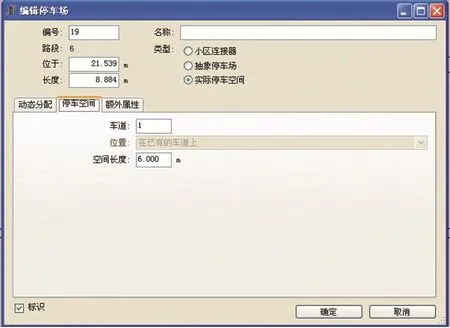
圖2 路內停車參數錄入Fig.2 Inputon-streetparking parameters
在一定時段內,若路內停車位無車輛駛入駛出,則需考慮對機動車車流的摩擦效應,否則,除摩擦效應以外,還應考慮路內停車對機動車車流的阻滯效應。為了更好地分析停車位對交通流的影響,本文采用VISSIM仿真的方式,主要針對路內停車位設置于無機非分隔帶的單幅路情況進行仿真驗證,目的是分析和比較在不同的機動車和非機動車飽和度情況下的機動車和非機動車的車均延誤,得出設置路內停車位的交通量條件。這種設置形式路內停車對行駛中的非機動車、機動車都會造成一定的影響。
1.2 VISSIM建模過程
以常州市藥皇廟弄為原型進行VISSIM建模研究。藥皇廟弄為城市支路,道路橫斷面形式為單幅路,雙向機動車道寬7m,路內停車位設置于道路南側,共15個,停車位寬2m。根據實際調查,1 h共有28次車輛駛入,13次車輛駛出。
本文結合實地調查數據和仿真實驗的需要,輸入模型所需要的相關參數值。由于路內停車以小型車為主,VISSIM仿真中車輛類別主要為小型車和非機動車,調整每一類別所包含的車輛類型,并定義各種車輛對應的外廓尺寸、最大加減速度等。根據實測數據,機動車期望速度為25~45 km·h-1,非機動車期望速度為10~28 km·h-1(見圖1)。
機動車駕駛行為選取W iedemann74跟車模型,平均停車間隔模型根據中國城市道路的仿真經驗取值為1.2m。非機動車駕駛行為選擇Wiedemann99模型,設置非機動車停車間距為0.5m,最小橫向間距為0.2m,并依次設置車道變換、橫向行為、超車行為等相關參數。
路內停車時間分布根據實測數據按照經驗分布定義。在停車場創建窗口設定停車類型、尺寸等屬性,參數輸入界面如圖2所示。
完成數據輸入后,還需要使用優先規則、路徑選擇等建模手段使模型更符合實際,仿真界面如圖3所示。
經驗證,模擬輸出的機動車行程時間與藥皇廟弄實測數據誤差在8%以內,滿足精度要求,因此仿真模型可以用于研究設置停車位的交通量條件。模擬輸出的數據主要為車均延誤、行程時間等。
2 仿真數據分析
本次仿真機動車飽和度(V/C)按照0.1~1.0(步長均為0.05)設定、非機動車飽和度按照0.1~1.0(步長均為0.1)設定,共模擬了190個機非混行場景。由于停車位占用原非機動車道設置,因此,計算非機動車道的通行能力時,應在原非機動車道寬度的基礎上,扣除路內停車位占用的道路寬度。
仿真主要輸出了2種延誤值,即機動車車均延誤和非機動車車均延誤(見圖4)。
1)機動車、非機動車的車均延誤值隨著機動車飽和度的增加而不斷增大。當機動車與非機動車飽和度均為0.1時,機動車和非機動車延誤均較低,分別為5.3 s和0.4 s,可忽略。但當機動車與非機動車飽和度均為1.0時,機動車和非機動車延誤顯著增至42.2 s和34.9 s。
2)當機動車飽和度小于0.4、非機動車飽和度小于0.5時,機動車和非機動車的車均延誤增長平緩,路內停車對機動車和非機動車影響不大,機非干擾程度較輕。說明在路段交通流不大的情況下設置路內停車位,對交通流的摩擦和阻滯效應較小。
3)當機動車飽和度大于0.4、非機動車飽和度大于0.7時,機動車和非機動車的車均延誤變化劇烈,路內停車對機動車和非機動車影響較大,機非干擾程度較重。說明隨著路段機動車交通量的增加,路內停車對交通流的摩擦和阻滯效應愈加明顯,嚴重時會阻塞交通。
4)保持機動車飽和度不變時,機動車的車均延誤較非機動車大,并且機動車與非機動車的車均延誤均隨著非機動車交通量的不斷增長顯著提高,尤其是當飽和度大于0.6以上時增長尤其顯著(見圖5)。由于無機非分隔帶的路內停車位設置對機動車和非機動車均有影響,因此需要綜合考慮路段機動車和非機動車的交通量條件。
3 路內停車位設置的交通量條件
在道路條件滿足設置路內停車位的前提下,路段機動車交通量、非機動車交通量是判斷道路能否設置路內停車的主要依據。本文根據VISSIM仿真得到設置路內停車位后的機動車車均延誤值,可以評價路內停車位對路段的影響,從而得出路內停車位設置的交通量條件。

圖3 路內停車仿真界面Fig.3 On-streetparking simulation interface
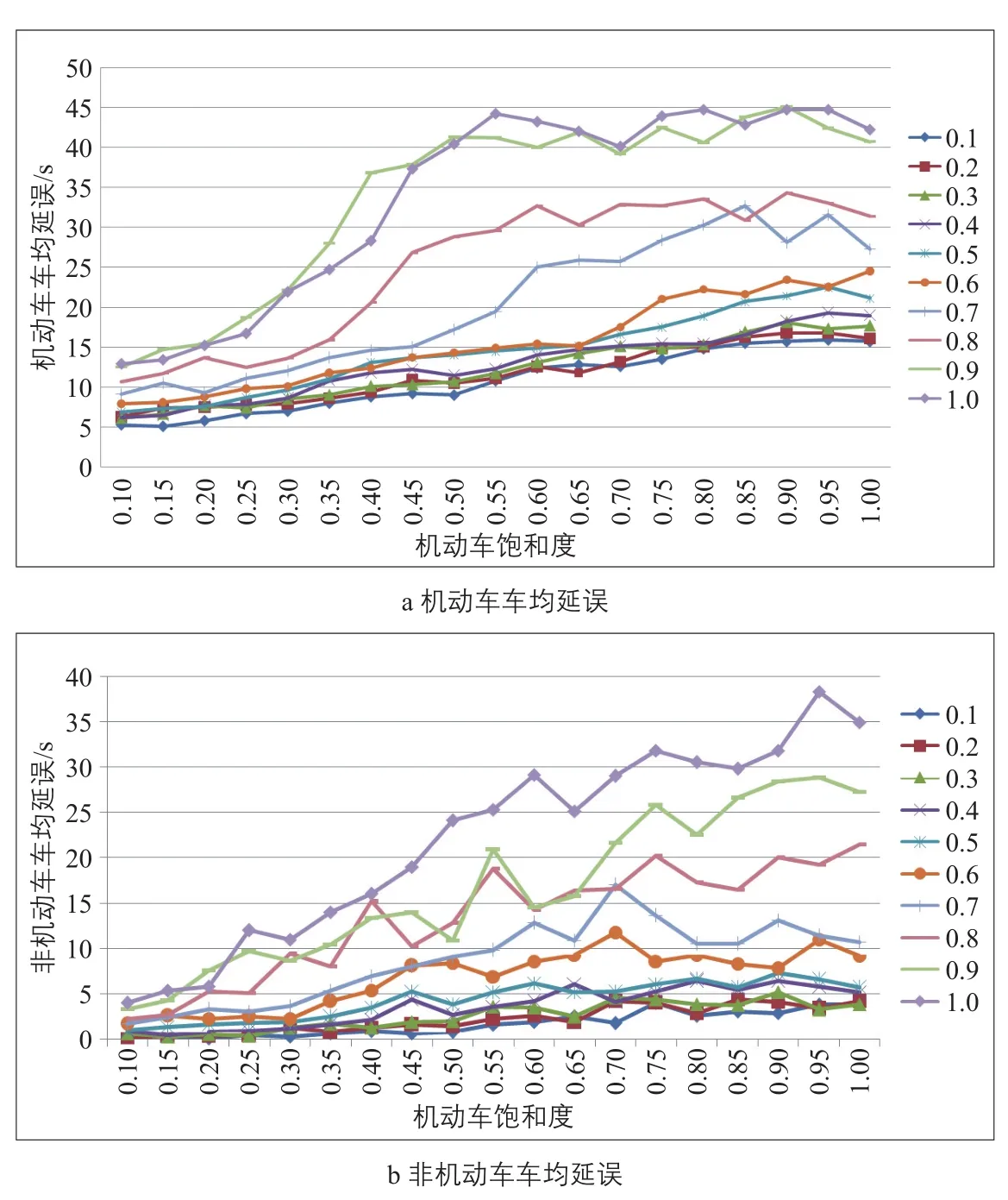
圖4 不同飽和度下的車均延誤Fig.4 Average vehicle delay under different levelsof saturation
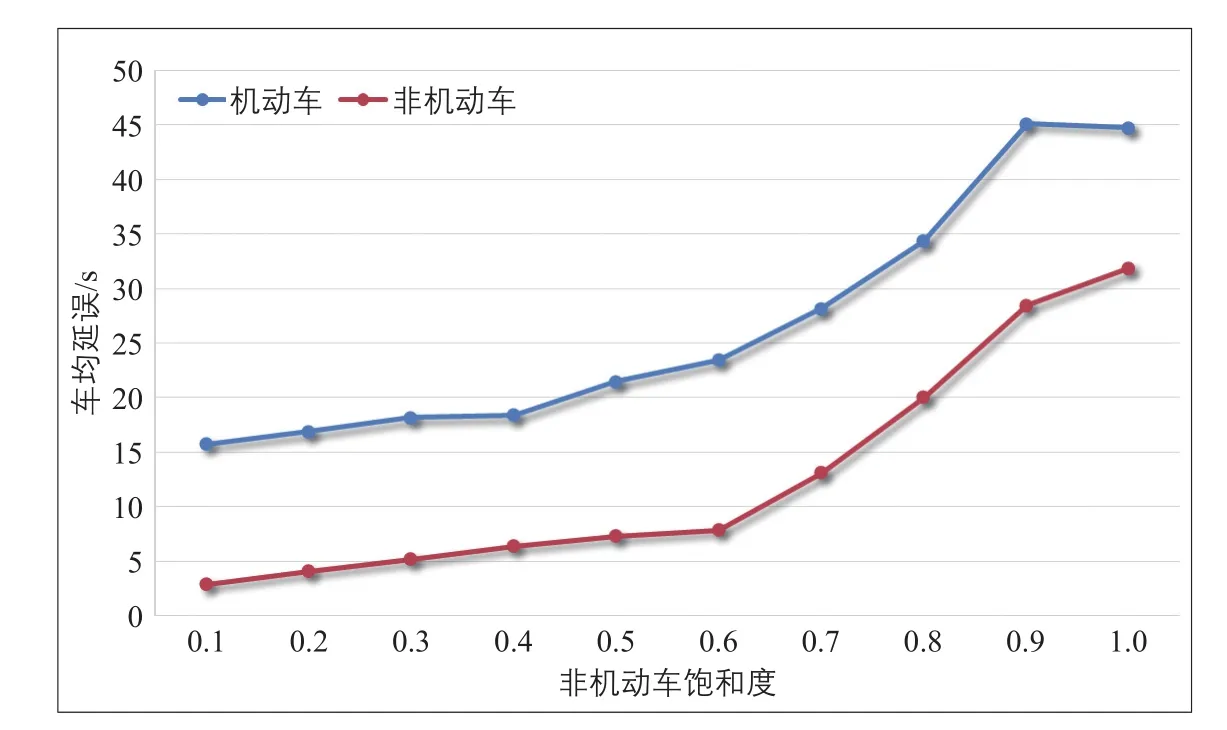
圖5 機動車飽和度為0.5時,機動車和非機動車車均延誤Fig.5 Average delay ofmotorized and non-motorized traffic in case ofa0.5 saturation rate
3.1 路內停車服務水平評價原理
路內停車服務水平評價主要參考《建設項目交通影響評價技術手冊》(以下簡稱《手冊》)[5]關于長路段服務水平的評價指標。
3.1.1 長路段交通影響評價方法
《手冊》規定,進行交通影響評價的長路段定義為路段交通幾乎不受交叉口影響的路段區域。長路段根據所屬道路等級不同,可分為高速公路長路段、快速路長路段、一級公路長路段等6類。不同等級路段對應的評價指標也有所區別,對于高速公路、快速路、一級公路長路段,其評價指標為交通流密度,對于二級、三級、四級公路長路段,其評價指標為延誤率。本文設置路內停車的單幅路可參照二、三、四級公路長路段的指標。
延誤率是指延誤時間占標準運行時間的百分率,路段停車交通流延誤率指通過該路段長度的車輛實際運行延誤時間與標準運行時間的比值百分數值。在已知該路段交通量和路段物理條件的基礎上,可以預測路段交通量的通行時間,或通過仿真軟件得到車輛區間運行時間和規劃道路等級下設計車速或運行車速,以此求得

式中:tr為車輛通過單位長度路段實際平均運行時間/s;ts為車輛在理想條件下通過該路段所需平均行程時間/s;ty為車輛實際通過單位長度路段的車均延誤/s。
3.1.2 路內停車服務水平評價
由于本次VISSIM仿真只建立了路段的停車模型,模擬得到的延誤數據不受交叉口影響,因此可以采用交通影響評價中的長路段評價方法,同時,參考《公路工程技術標準》(JTB B01—2014)中二、三、四級公路的服務水平分級,選取其中的延誤率作為設置路內停車位后路段服務水平的評價指標(見表1)。

表1 設置路內停車位后路段服務水平評價標準Tab.1 Evaluation standard of roadway segment levelof serviceafter setting on-streetparking
根據《公路工程技術標準》(JTB B01—2014),當路段服務水平達到四級時,交通流處于穩定流范圍下限,但是車輛運行明顯受到交通流內其他車輛影響,速度和駕駛的自由度受到明顯限制。交通量稍有增加就會導致服務水平顯著降低,駕駛人身心舒適水平隨之降低,即使較小的交通事故也難以消除影響,會形成很長的排隊車流。
因此,將路段四級服務水平的上限作為設置路內停車位的臨界值,即路段延誤率小于等于80%時,可設置停車位;路段延誤率大于80%時,不可設置路內停車位。
3.2 交通量條件
VISSIM仿真得到未設置路內停車位時車輛通過路段的平均行程時間為19.3 s,由公式(1)計算得出當路段機動車車均延誤小于等于15.4 s時即可設置停車位。
路內停車模型模擬得到不同機動車和非機動車飽和度情況下機動車車均延誤值(見表2),其中表格的灰色部分為滿足路內停車位設置要求的延誤指標。由此得到機非混行路段上設置路內停車位的機動車和非機動車交通量條件(見表3)。
4 結語
單幅路設置路內停車位,動靜態交通影響關系復雜,利用VISSIM仿真技術可以有效模擬各種交通情境,并輸出大量實驗數據,提高分析精度。本研究提出設置路內停車位的交通量條件,提供了量化標準的研究思路,可以為完善路內停車的規劃設計提供參考。本文研究的交通量設置條件結論主要適用于不受交叉口影響的長路段情況,下一階段可深化受信號控制交叉口影響的路段的路內停車位研究,補充完善設置路內停車位的交通量條件。
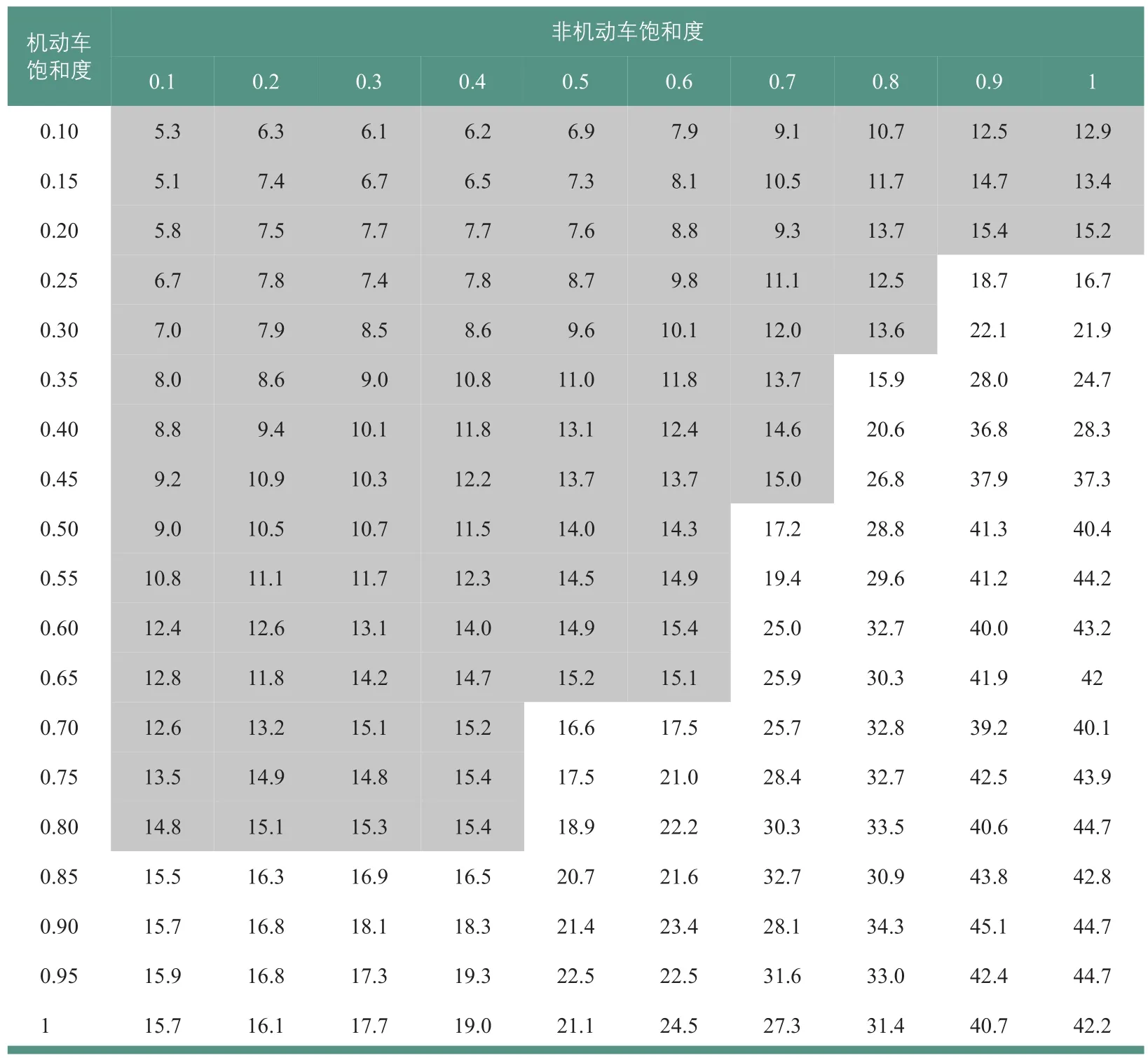
表2 不同飽和度情況下機動車車均延誤值Tab.2 Average vehicle delay under different levelsof saturation s
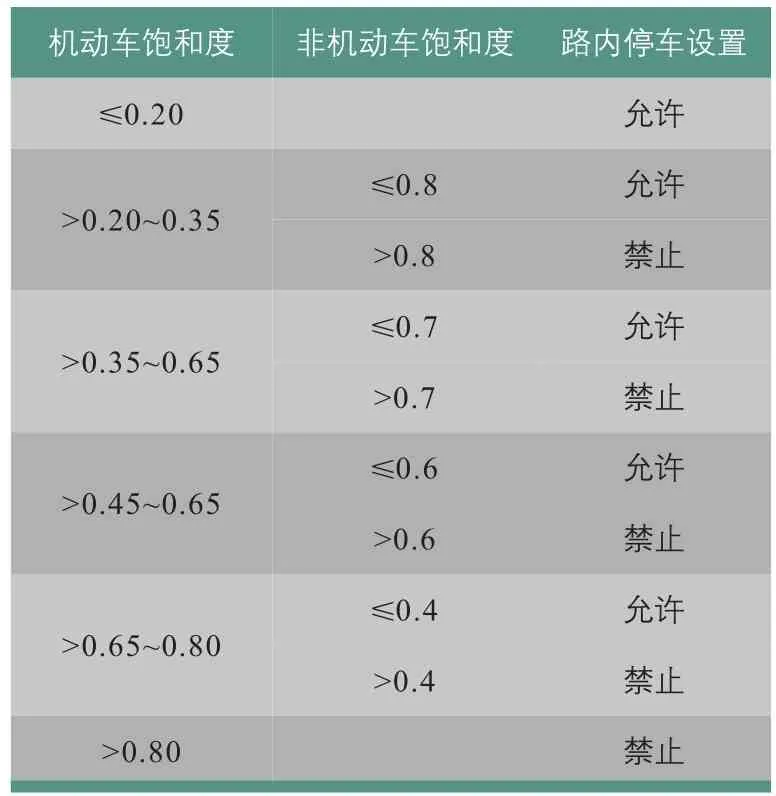
表3 機非混行路段設置路內停車位的交通量條件Tab.3 Traffic flow conditions forsetting on-street parkingw ithmixed traffic
[1]楊曉光,龍亮,蒲文靜.信號控制交叉口單側路邊停車最佳位置研究[J].同濟大學學報(自然科學版),2005,33(3):297-300.Yang Xiaoguang,Long Liang,Pu Wenjing.Optimal Distance Between One-Side Curbside Parking Location and Signalized Intersection[J].Journal of Tongji University(Natural Science),2005,33(3)∶297-300.
[2]高利平,孫全欣,劉明軍,等.基于路邊停車的機非混行延誤模型與仿真研究[J].系統仿真學報,2010,22(3):804-808.Gao Liping,Sun Quanxin,Liu M ingjun,et al.Delay Models and Simulation on M ixed Traffic System w ith Curb Parking[J].Journal of System Simulation,2010,22(3)∶804-808.
[3]郭宏偉,高自有,趙小梅,楊小寶.路內停車對非機動車交通行為影響研究[J].交通運輸系統工程與信息,2011,11(1):79-84.Guo Hongwei,Gao Ziyou,Zhao Xiaomei,Yang Xiaobao.Traffic Behavior Analysis of Non-Motorized Vehicle Under Influence of Curb Parking[J]. Journal of Transportation Systems Engineering and Information Technology,2011,11(1)∶79-84.
[4]張泉,黃富民,曹國華,等.城市停車設施規劃[M].北京:中國建筑工業出版社,2009.
[5]《建設項目交通影響評價技術標準》編制組.建設項目交通影響評價技術手冊[M].北京:中國建筑工業出版社,2011.
A Simulation-Based Approach to Determ ine the Relationship Between Traffic Flow Conditions and On-Street Parking
LiYa1,Gong Xiang2,Wang Yunxia1,Zu Yongchang1
(1.Traffic Management Research Institute of Public Security M inistry,Wuxi Jiangsu 214151,China;2.Wuxi Instituteof Urban Planning and Design,Wuxi Jiangsu 214031,China)
∶Road space generally occupied by on-street parking resulted low roadway capacity and traffic dangers.To achieve a high parking efficiency,it is necessary to discuss the traffic flow conditions for setting on-streetparking.Focusing on divided road w ithm ix traffic,this paper investigates the impacts of onstreet parking on traffic flow using Changzhou on-street parking investigation data and VISSIM simulation.About190 scenarios are simulated using on-streetparkingmodel,w ith a saturation ofmotorized traffic from 0.1 to 1.0(stepw ise 0.05)and a saturation of non-motorized traffic from 0.1 to 1.0(stepw ise 0.10),to analyze the average delay ofmotorized and non-motorized traffic by different saturation.Taking traffic delay rate asan indicator evaluating roadway levelof service based on traffic impactassessment,the paper proposes the traffic volume ofmotorized and non-motorized traffic for the setting of on-street parking on the roadway w ithm ix traffic.
∶urban transportation;on-streetparking;setting conditions;VISSIM simulation;traffic flow
∶
1672-5328(2016)06-0055-05
U491
A DOI∶10.13813/j.cn11-5141/u.2016.0609
2014-12-01
國家科技支撐計劃課題“動靜態一體化城市交通智能聯網聯控技術集成及示范”(2014BAG03B01)
李婭(1983—),女,四川綿陽人,碩士,工程師,主要研究方向:交通工程、交通管理。E-mail∶liya821@126.com
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
少先隊活動(2021年4期)2021-07-23 01:46:22
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
中國艦船研究(2014年5期)2014-05-14 06:43:09
都市快軌交通(2014年4期)2014-02-27 08:35:05