單相缺相故障下雙三相永磁同步電機矢量控制策略研究*
2016-12-13 02:10:46徐正喜
艦船電子工程 2016年11期
雷 津 耿 攀 張 平 徐正喜
(1.海軍駐719所軍事代表室 武漢 430064)(2.武漢第二船舶設計研究所 武漢 430064)
?
單相缺相故障下雙三相永磁同步電機矢量控制策略研究*
雷 津1耿 攀2張 平2徐正喜2
(1.海軍駐719所軍事代表室 武漢 430064)(2.武漢第二船舶設計研究所 武漢 430064)
論文研究了單相缺相故障下不對稱雙三相永磁同步電機的矢量控制策略。從繞組解耦角度出發構造了虛擬等效的兩相定子電流分量,提出了一種坐標變換的方法,有效地實現了不對稱電機系統向對稱電機系統的變換,實現了不對稱三相電機的解耦控制問題,在控制上獲得與直流他勵電動機性能相似的結果。通過進行仿真,認為該策略使得雙三相電機在運行的過程中電磁轉矩脈動的問題能夠有效減小,實現虛擬磁場定向解耦控制。
雙三相永磁同步電機; 不對稱繞組; 坐標變換; 解耦控制
Class Number TM301
1 引言
與傳統的三相電機驅動相比,雙三相電機驅動系統優勢明顯,其可靠性極高,冗余度較大。當出現了一個或者是多個定子繞組損失時,對性能要求不高的情況下其還能夠連續運行。因此,對三相電機在故障運行狀態下的容錯控制方法進行研究,能夠有效地發揮雙三相電機的優良性能,意義非常重大[1~2]。雙三相電機故障后的容錯控制之一是對故障后剩余相的電流幅值以及相位進行調整,進而使得故障前后的定子繞組產生完全一樣的瞬時磁動勢,有效地實現磁勢的補償控制[1,3]。此方法在改善調速系統的性能方面起到了關鍵作用,但是存在一定缺陷,其沒有對故障后電機的電磁參數改變進行考慮,導致控制性能嚴重下降。當在不對稱組結構情況下,如何有效地實現對解耦控制,使得雙三相永磁同步電機的可靠性有明顯提高,將具有非常重要的意義[4]。
本文通過對旋轉坐標變換進行改進,有效地解決了在單相缺相故障的雙三相永磁電機的不對稱問題,真正地實現解耦控制和矢量控制。
2 單相缺相時兩相靜止坐標系下的電機模型
本文以雙三相電機F相缺相故障為例進行分析。

(1)
上式滿足αβT=0。
對于定子磁勢來說,其分布是根據正弦規律分布,剩余的五相繞組的總磁勢等于兩相繞組總磁勢時,在α-β軸上的,兩套繞組瞬時磁勢應該具有相等的投影[6~7],因此有:
(2)
在進行坐標變換時,磁動勢以及功率不發生變化,據此原則,進行坐標系間變換時,矩陣必須為單位正交矩陣。首先,在αβ二相系統上添加正交零序分量3個,令z1、z2、z3為其正交變換矢量,根據下式獲得[1,3,8]:
(3)
把式(1)和由式(3)解得的五個正交向量單位化,得到如下的單位正交矩陣:
(4)
則其對應的逆矩陣為[2~3]
(5)
(6)
五相自然坐標系下不對稱雙三相電機方程為
(7)

(8)
記Lsα=3Lms+Lls,Lsφ=2Lms+Lls。
則有
(9)
(10)
通過以上分析可知,F相斷相時雙三相永磁電機,在機電能量相關的α-β子平面中,其不是一個對稱的二相電機,但是對于z1-z2-z3子平面,其是零平面,且與α-β子平面正交[2~4,9]。
此時,雙三相電機將不具備對稱性,傳統的旋轉坐標變換將不再適用,不能對其進行解耦,即不能對其進行矢量控制[9~11]。要想對其進行坐標變換,需要進行改進,得到新的dq坐標系下的解耦的電機方程,進而有效的實現矢量控制。
3 改進旋轉坐標系下的雙三相電機矢量控制模型

將等效αβ繞組匝數以及定子磁動勢αβ軸分量分別設為N1和N2以及Fα和Fβ,則:
(11)
設同步旋轉坐標系,定子繞組磁動勢dq軸分量分別為Fd和Fq,則[5~6]:

(12)
實際上,定子繞組的匝數比即為對應軸互感之比。即:
(13)
故有:
(14)
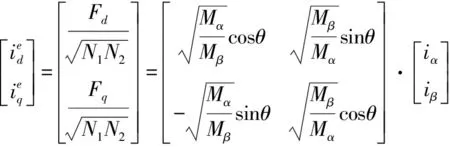
(15)
上式實現了對新型旋轉坐標變換的構造,如圖1所示。上述的坐標變換方法有效地保證了變換前后定子磁勢的等效,使得不對稱繞組的對稱化有效地實現,從而實現不對稱繞組解耦控制。
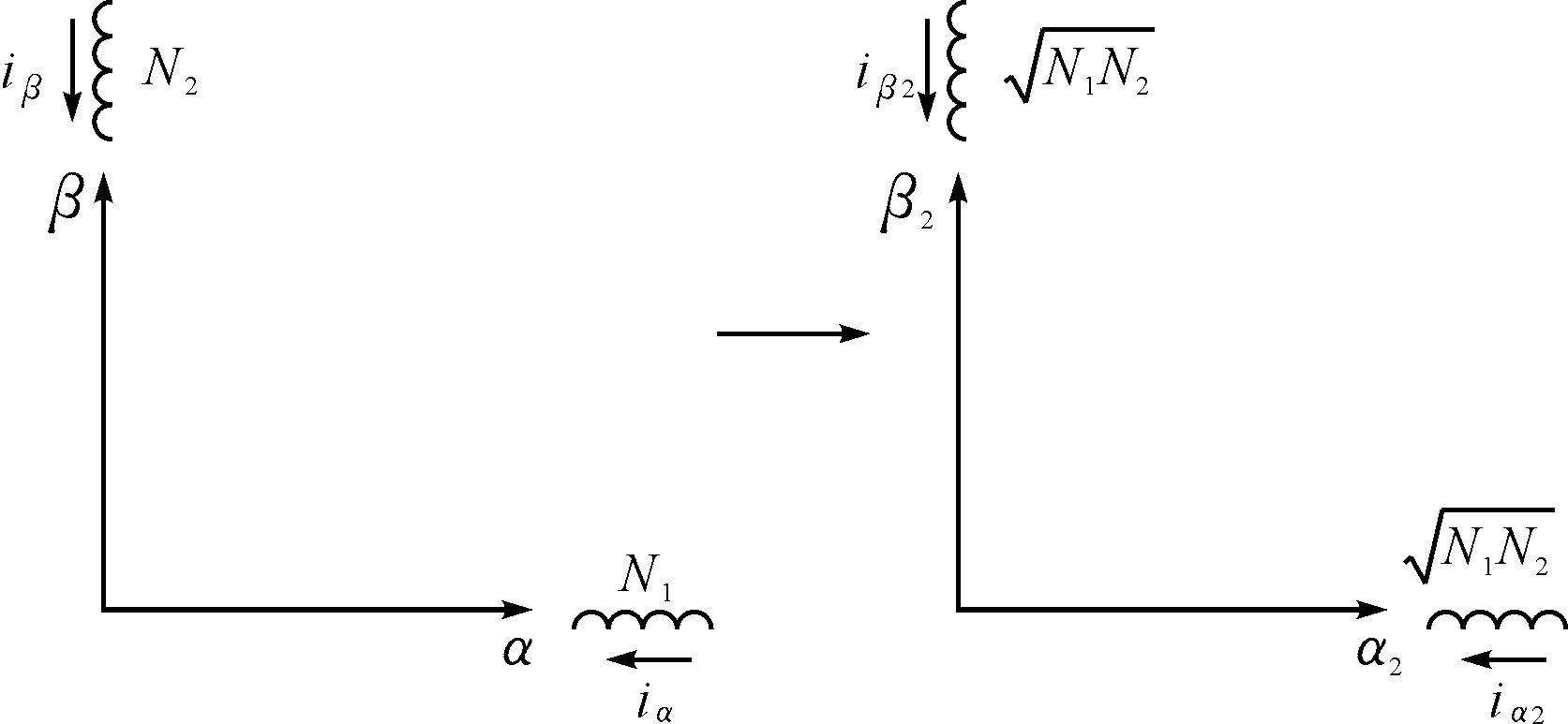
圖1 繞組不對稱時的繞組等效對稱變換圖
(16)
擴展為5階矩陣得:
(17)
則有:
(18)
記Ld5=3Lms,Lq5=2Lms
通過對上述進行分析得改進后的同步旋轉坐標下的發生F相單相開路的電機電磁模型:
(19)
控制isd=0時,上式可簡化為
(20)
在上式中,當永磁體磁鏈ψf以及極對數np不變時,仍然能夠實現對雙三相電機的解耦控制瞬時值進行控制,就能夠實現不對稱雙三相永磁同步電機電磁轉矩的瞬時控制[11~12]。
其控制框圖如圖2所示。

圖2 優化的不對稱雙三相電機矢量控制框圖

永磁體磁鏈d軸電感q軸電感漏感定子電阻極對數額定轉矩額定轉速轉動慣量0.175Wb8.5mH5.87mH0.6mH1Ω317.5N.m300rpm0.089kg?m2
4 仿真驗證與結果分析
在本節,仿真研究了上節所改進的基于旋轉坐標變換的不對稱雙三相電機磁場定向控制。在進行仿真的過程中,電流的采取滯環控制,在0.2s時,F相缺相故障發生,0.2s以后將本文所提出的優化矢量控制策略應用其中。不對稱雙三相永磁電機的仿真參數如表1所示。
圖3是將不對稱雙三相電機矢量控制進行優化以后,其穩態運行狀態圖,在圖中,由上到下,依次對六相電壓、電流以及電機轉速和電磁轉矩波形進行分析。對于每幅圖,都包含了三種不同的運行狀態, 0~0.2s,無故障的雙三相永磁電機基于電流滯環的矢量控制運行狀態;而后的0.2s,是F相缺相故障下電機系統未采用優化的控制策略時的系統運行狀態;0.4s~0.6s是采用了本文提出的故障下優化的矢量控制策略的電機系統運行狀態。從圖中可以看出,本文提出的不對稱雙三相電機優化策略下的電機電磁轉矩脈動約為3N·m,比正常的脈動分量稍大,但是與優化前的單相缺相故障的轉矩脈動相比明顯減少。此策略使得單相缺相故障有效減少,使得電機運行狀態更加穩定。通過對其進行優化,使得不對稱電機的定子繞組電流基本與故障前保持一致,但是有效增加了相電壓幅值,使得F缺相所導致的功率損失得到有效補償,從而保持系統運行狀態的穩定。通過上分析,能夠看出在本文所提出的缺相故障下的雙三相永磁同步電機的改進同步旋轉坐標變換方法,能夠使得不對稱繞組的解耦控制有效實現。當雙三相電機發生單相缺相故障時依然具備直流他勵電機的優良控制特性。

圖3 不對稱雙三相電機矢量控制穩態運行狀態圖
5 結語
本文對F相缺相時的雙三相永磁電機的電機模型進行了研究,通過公式推導,提出了基于虛擬定子電流分量的雙同步旋轉坐標系控制策略。該策略通過建立虛擬的同步旋轉坐標系,實現對不對稱雙三相永磁同步電機系統的解耦,使得其成為對稱的電機系統,從而實現了電機兩套虛擬同步旋轉坐標分量之間獨立的線性控制。仿真研究表明,本文研究的改進方法有效地實現了不對稱繞組的解耦控制,穩定電機轉速,抑制電磁轉矩的脈動,保持不對稱雙三相電機的穩定運行。
[1] Jen-Ren F, Lipo T A. Disturbance-free operation of a multiphase current-regulated motor drive with an opened phase[J]. IEEE Transactions on Industry Applications,1994,30(5):1267-1274.
[2] Zhao Y, Lipo T A. Modeling and Control of A Multi-Phase Induction Machine with Structural Unbalance Part I-Machine Modeling and Multi-Dimensional Current Regulation [J]. IEEE Transactions on Energy Conversion,1996,11(3):570-577.
[3] Zhao Y, Lipo T A. Modeling and Control of A Multi-Phase Induction Machine with Structural Unbalance Part II-Field-Oriented Control and Experimental Verification [J]. IEEE Transactions on Energy Conversion,1996,11(3):578-584.
[4] Yifan Zhao, Thomas A. Lipo. Vector PWM Control of Dual Three Phase Induction Machine Using Vector Space Decomposition [J], IEEE Transactions on Industry Applications,1995,31(5):1100-1109.
[5] Betin F, Capolino G A. Shaft Positioning for Six-Phase Induction Machines With Open Phases Using Variable Structure Control[J]. IEEE Transactions on Industrial Electronics,2012,59(6):2612-2620.
[6] 張平.雙三相電機矢量控制及容錯控制策略研究[D].杭州:浙江大學,2014.
[7] 歐陽紅林.多相永磁同步電動機調速系統控制方法的研究[D].長沙:湖南大學,2005.
[8] 周馬山.基于DSP的多相永磁同步電機矢量控制系統[D].長沙:湖南大學,2010.
[9] 李山.多相感應電機控制技術的研究[D].重慶:重慶大學,2009.
[10] 周馬山, 歐陽紅林, 童調生.不對稱多相 PMSM 的矢量控制[J]. 電工技術學報,2004,19(12):37-41.
[11] 張平,耿攀,楊文鐵,等.船舶電力推進雙三相永磁同步電機電流控制策略研究[J].船電技術,2014,34(12):60-63.
[12] Hyung-Min R, Ji-Woong K, Seung-Ki S. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phases[J].IEEE Transactions on Industry Applications,2006,42(4):1062-1070.
Vector Control of DTP-PMSM with Missing Phase
LEI Jin1GENG Pan2ZHANG Ping2XU Zhengxi2
(1.Naval Representive Office in 719 Institute, Wuhan 430064)(2.Wuhan Second Ship Design and Research Institute, Wuhan 430064)
In this paper, single-phase phase vector asymmetric double fault phase permanent magnet synchronous motor control is studied. Decoupled from winding angle construct virtual equivalent of two-phase stator current component a method of coordinate transformation is proposed, the transformation of asymmetric motor system to symmetrical motor system is achieved, the three-phase asymmetry decoupling motor control problems are implemented effectively, him excited DC motor performance similar results are gotten in the control. Through simulation, that the policy making process in the two-phase motor running problem of electromagnetic torque ripple can be effectively reduced, virtual flux orientated decoupling control is realized.
dual three-phase permanent magnet synchronous motor, asymmetric winding, rotating coordinate transformation, winding decomposition control
2016年5月13日,
2016年6月21日
雷津,男,碩士,高級工程師,研究方向:船舶電氣。耿攀,男,碩士,高級工程師,研究方向:船舶電力系統、電力電子技術和電磁場防護。張平,男,碩士,工程師,研究方向:船舶電電力電子技術和電磁場防護。徐正喜,男,碩士,研究員,研究方向:船舶電電力電子技術和電磁場防護。
TM301
10.3969/j.issn.1672-9730.2016.11.037
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
