某型無人機機載任務管理計算機設計
2016-12-19 02:52:16皮祖成王誠陳文
航空工程進展 2016年4期
皮祖成,王誠,陳文
(中國航天空氣動力技術研究院 特種飛行器總體設計部,北京 100074)
?
某型無人機機載任務管理計算機設計
皮祖成,王誠,陳文
(中國航天空氣動力技術研究院 特種飛行器總體設計部,北京 100074)
某型無人機系統具有多掛載能力,能同時掛載多種任務載荷。為了統一管理和綜合使用多個任務載荷,通過分析機載任務設備接口的類型和通信需求,設計一種具有接入現有設備能力的任務管理計算機。該機采用成熟的插卡式集成設計方式,具備較好的使用靈活性和功能擴展能力。通過該任務管理計算機可實現對任務載荷設備的控制,對遙控、遙測、載機狀態數據的管理,以及授時同步功能。任務管理計算機對任務載荷設備的綜合管理,能夠提高無人機任務載荷的集成能力,減少了任務載荷與載機平臺之間的交聯關系,使任務載荷系統更加獨立,降低了任務載荷系統對飛行平臺安全的影響。
任務管理計算機;任務載荷;無人機;授時同步
0 引 言
中空長航時無人機系統具有飛行高度較高、載荷能力強、航程大等優點,可執行長時間的偵察和監視任務,同時可掛載精確制導彈藥對地面固定和低速移動目標進行實時打擊[1]。中空長航時察打一體無人機可同時掛載光電偵察平臺、合成孔徑雷達、船舶自動識別系統、綜合防撞系統和制導武器等多種任務載荷,根據不同的飛行任務需求,還可將合成孔徑雷達或光電偵察平臺換裝為航空相機或電子戰設備。為了統一管理無人機上的各種任務載荷,使它們協同工作,從而讓無人機更高效地執行各項任務[2],需要設計專門用于任務載荷管理的任務管理計算機,簡稱任管機。
國外,已對任務管理進行了諸多研究[3-5],尤其是對任務管理的系統架構、任務管理相關的航空電子設備構型和任務管理軟件層次結構等進行了較為深入的研究。國內,針對長航時無人機和小型無人機的飛行器管理計算機也進行了設計研究[6-10],但多數設計均將飛行控制和任務管理集中于一臺計算機,當任務管理工作量較大時需占用較大的計算機資源,且飛行控制邏輯和任務管理邏輯相互耦合,使飛控計算機的軟件復雜度大幅增加,對飛行安全造成影響。何成軍等[11]、邢聯大等[12]、朱峰等[13]和陳福等[14]分別對管理計算機的嵌入式系統軟件進行了分析研究,提出了高效可靠的軟件架構,并使用VxWorks操作系統,通過任務劃分和狀態機等技術提高了軟件系統的可靠性和安全性。王向軍等[15]基于GPS時鐘和實時時鐘研究了時間同步授時,取得了較好效果。
本文針對中空長航時無人機,通過分析其機載任務設備接口的類型和通信需求,設計一種用于任務載荷管理的任務管理計算機,該機采用插卡式集成設計方式,可接入所有的任務載荷設備,并由其集中管理。
1 功能架構
任管機作為任務載荷與載機平臺、數據鏈路交聯的中樞設備,其交聯關系如圖 1所示。

圖1 任務管理計算機與外部設備的交聯關系
任管機從飛控計算機實時獲取飛機的狀態信息,并向飛控計算機發送任務載荷通電/斷電等控制指令,同時為飛控計算機提供在軌彈藥數目等任務設備的狀態信息。任管機通過數據鏈路實現與地面站之間的遙控和遙測過程。任管機可以選擇是否對遙控指令進行解析,并將遙控數據發送給任務載荷;任務載荷的所有狀態數據、偵察情報等信息也直接傳輸到任管機中,任管機對上述信息進行匯總,并以任務狀態數據和遙測數據的形式分別提供給飛控計算機和數據鏈路。本文從硬件和軟件兩方面對任管機進行設計。硬件主要提供足夠的運算能力和外部接口能力;軟件主要完成各種具體功能的實現,管理各種狀態數據并控制數據流。
2 硬件設計
為了使硬件平臺具有靈活性和可靠性,任管機的硬件設計采用插卡式架構。任管機中的設計主控板卡用于管理其他資源并完成主控運算功能,主控板卡采用基于PowerPC架構的CPU,配置256 MB內存和128 MB的Flash存儲空間,在主控板卡中運行VxWorks操作系統。任管機的各種接口功能被分別設計為獨立的功能板卡,各個功能板卡與主控板卡之間通過背板ISA總線進行通信。載機供電直接輸入到電源板卡中,經電源板卡變換后的電源通過背板上的電源走線向所有板卡供電。任管機硬件結構如圖 2所示。

圖2 任務管理計算機硬件結構
任管機中包含四類功能板卡:異步422接口板卡、同步422接口板卡、邏輯和模擬信號接口板卡和視頻接口板卡。異步422接口板卡和同步422接口板卡均采用基于FPGA芯片為核心的硬件架構。異步422接口板卡用于傳輸控制指令和狀態信息數據。同步422接口板卡用于傳輸圖像等需要占用較大帶寬的數據。邏輯和模擬信號接口板卡主要包含DI、DO和AI、AO接口電路,主要由數字邏輯芯片和A/D芯片組成,可輸入/輸出28和5 V電平信號的數字量,同時可對±10、±5 V的模擬量進行數字化采樣,該功能板卡用于連接具有數字或模擬量接口的任務載荷,也用于秒脈沖信號的輸入。視頻接口板卡主要用于多路視頻信號的路由選擇功能,在板卡上設計6路視頻輸入和4路視頻輸出接口,輸入和輸出接口均采用HD-SDI視頻接口作為標準,采用HD-SDI接口芯片和阻抗匹配電路。輸入信號和輸出信號之間采用高速差分信號矩陣開關(如圖 3所示),通過該矩陣開關可實現“輸出_N”(N=1~4)信號從“輸入_M”信號中(M=1~6)任意選擇的功能。輸出的視頻信號可通過數據鏈路發送到無人機地面站,也可提供給機載視頻存儲儀等其他設備使用。

圖3 視頻矩陣開關
3 軟件設計
從任管機需要完成的功能軟件層面來分析,軟件需要完成三種任務:數據管理、設備控制和授時同步。
3.1 遙控數據管理
遙控數據均來源于地面站通過數據鏈路向任務載荷(包括任管機)發送的各種控制數據。由于存在多個任務載荷,需要對不同載荷的遙控數據進行區分。通過在遙控數據幀中增加目標設備的識別號進行判斷,遙控數據幀結構如圖4所示。設備ID號由一個字節表示,可區分256種載荷設備,針對任管機遙控數據的設備ID為0x00。

圖4 遙控數據幀結構
Fig.4 Telemetry frame content
遙控數據處理流程如圖5所示。將遙控數據分為兩類,一類為地面站給任管機發送的遙控指令,該類指令用來實現對任管機內部功能狀態的控制;另一類為地面站給任務載荷設備發送的遙控指令,該類指令在到達任管機后需由任管機轉發到對應的任務載荷設備。不同的任務載荷設備分別接入到任管機上的不同通信接口,每個接口有唯一的通信地址,故任管機只需將設備ID號與設備通信地址進行綁定就可完成遙控指令的轉發。為了簡化程序運行過程,建立設備ID號與目標任務載荷通信地址的映射表,如表1所示。任管機可將該表存儲在設備內存中,通過維護該表的內容,可以靈活地配置任務載荷接口的集成方式。

圖5 遙控數據處理流程

設備ID通信地址設備名稱0x01“COM1”光電載荷0x02“COM6”雷達載荷………0xFF“COM8”船舶自動識別系統
3.2 遙測數據管理
遙測數據來源于多個任務載荷設備,大部分遙測數據為任務載荷所探測、收集到的偵察數據,也包含一小部分任務載荷的工作狀態數據。任務載荷產生的遙測數據根據帶寬占用情況分為兩類:一類是占用帶寬大的圖像和視頻數據,另一類是占用帶寬小的其他數據。任管機對這兩種類型的數據分別進行管理。
3.2.1 圖像和視頻數據的遙測
由于數據鏈路帶寬的限制,無法將任務載荷所有占用帶寬大的數據同時傳給地面站,任管機將占用帶寬大的數據直接傳輸給由數據鏈路提供的圖像接口和同步422接口等帶寬較大的數據接口,以實現大帶寬數據的傳輸。數據切換功能由硬件來完成,故在任管機軟件中設計對應的控制接口即可,切換模式采用SwitchToDL函數完成圖像、視頻數據的遙測切換,如圖6所示。

圖6 占用帶寬大的數據切換模式
3.2.2 其他數據遙測
用于傳輸遙測數據的數據鏈路,其帶寬為固定值,而不同無人機裝配的任務載荷設備各異,遙測數據所占用的帶寬也因無人機配型的不同而不同。為了管理各任務載荷設備對遙測帶寬的占用,任管機采用基于任務載荷設備優先級的遙測管理方法。根據任務載荷設備在使用過程中的重要程度將其劃分優先級,首先滿足優先級高的任務載荷設備的遙測需求,然后發送優先級低的任務載荷設備的遙測數據,其處理流程如圖7所示。

圖7 遙測數據處理流程
在總帶寬不夠用的情況下,應先丟棄優先級低的任務載荷的遙測數據。遙測緩沖類如圖8所示,使用字節類型的數組“buffer”作為數據緩沖區,為了減少數據操作的時間,將其設計為環形緩沖區;使用幀定位數組“FrameArray”來定位緩沖區內每個完整幀的頭尾位置,通過該數組可以快速地定位一幀數據在緩沖區中的位置,便于對完整一幀數據進行操作。當緩沖區滿時,可通過IsLoss標識設置是否丟棄舊數據。用戶程序通過InBuffer和OutBuffer接口對該緩沖區對象進行操作,用于存入和取出緩沖區內容。

圖8 遙測緩沖類
3.3 載機狀態數據管理
載機狀態數據包含載機的姿態、位置、時間等信息,任管機通過與載機的接口獲取這些信息,同時,任管機通過與各任務載荷設備的接口獲取載荷狀態數據。由于有多個任務載荷需要使用載機信息,需要建立載機信息共享數據存儲區域,共享方式如圖9所示。為了保持共享數據的完整性,還需要建立用于讀取和寫入數據的互斥機制。

圖9 載機狀態數據共享方式
3.4 設備控制
由地面站發送到任管機的遙控數據中包含兩類控制數據:一類用于對任管機外圍任務載荷進行控制,另一類用于對任管機的各功能模塊進行控制。任管機對外圍任務載荷的控制主要通過轉發地面站對任務載荷的遙控指令來實現,需要地面人員對遙測數據進行觀察來完成對命令執行效果的評判。對任管機各功能模塊的控制也通過地面站對任管機的遙控指令來實現,任管機接收遙控指令的軟件流程如圖5所示,對各功能模塊的控制執行流程如圖10所示。
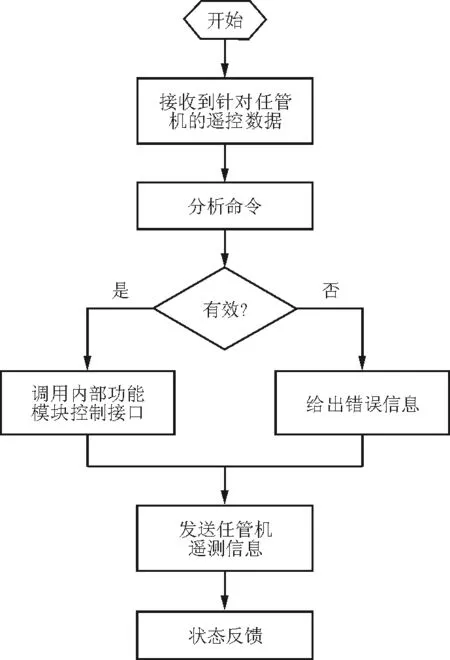
圖10 對任管機各功能模塊的控制
3.5 授時同步
3.5.1 不帶秒脈沖的授時
授時同步分為帶秒脈沖信號的精確同步和不帶秒脈沖信號的一般同步。對于不帶秒脈沖的一般授時同步,采取在通信口發送特殊的對時機制來實現,如圖11所示。由B設備向A設備(任管機)發送對時請求,此時B設備記錄發送時刻TB0,A設備收到B設備的對時請求時,A設備記錄接收到該請求的時刻TA0,再由A設備向B設備發送當前時刻TA1和TA0,B設備在TB1時刻接收到TA1和TA0數據,此時B設備按照公式(1)進行時鐘校準。

圖11 B設備向A設備請求準確時間
(1)
某些情況下需要由A設備(任管機)發起對時指令,此時由A設備向B設備發出對時指令,B設備按照如圖11所示的方式進行對時即可,此時授時同步的流程如圖12所示。為了使授時更精確,A、B設備在發送和接收消息時需盡快處理時間信息,中間應盡量減少因系統中斷而帶來的干擾。

圖12 由A設備啟動的對B設備的授時
3.5.2 帶秒脈沖的授時
在需要高精度授時的情況下,采用帶秒脈沖信號的授時機制。時鐘源設備每秒發出一個脈沖信號,該脈沖信號的上升沿與時鐘信息高精度對齊,由此可對其他設備進行高精度授時。A設備(任管機)向B設備發送啟動授時指令,B設備收到后向A設備發送請求授時申請,A設備收到該申請后,在緊接著的一個秒脈沖發生后立刻向B設備發送當產生前秒脈沖時的時刻TA0,B設備收到該時刻后在下一個接收到秒脈沖的時刻將B的系統時間設置為T=TA0+1,完成授時過程,如圖13所示。

圖13 秒脈沖授時
4 結 論
(1) 本文設計的任務管理計算機具有接入現有設備的能力,由任務載荷設備和任管機所組成的任務載荷系統對載機、數據鏈路等系統的所有接口通過任管機提供。任管機具備以下功能:①管理任務載荷的遙測和遙控數據;②監控任務載荷狀態;③實現多路視頻的接入和分配;④對任務載荷授時同步;⑤提供與其他系統的接口。實踐表明,該任務管理計算機具有較好的使用靈活性和功能擴展能力。
(2) 任管機作為中空長航時無人機系統中管理任務載荷的核心設備,它可以將任務載荷設備從無人機平臺系統中分離出來,使無人機平臺專注于對飛行平臺性能的控制,而不受任務載荷系統過多的影響。任管機對任務載荷設備的綜合管理,能夠提高任務載荷的集成能力;同時,載荷設備之間的協同應用也可在此基礎上開展,為載荷應用水平的提升奠定了硬件和軟件架構基礎。
[1] 蘭文博, 劉凱, 汪洋. 中空長航時無人機防區外對地攻擊作戰體系研究[J]. 飛航導彈, 2015(12): 30-33. Lan Wenbo, Liu Kai, Wang Yang. Research on air-to-ground attacking system of long-endurance UAV[J]. Aerodynamic Missile Journal, 2015(12): 30-33.(in Chinese)
[2] 湯一峰. 無人機自主協同任務管理[J]. 航空電子技術, 2013(1): 54-56. Tang Yifeng. Autonomous collaborative task management of UAV[J]. Avionics Technology, 2013(1): 54-56.(in Chinese)
[3] Eduard Santamaria, Pablo Royo, Cristina Barrado, et al. An integrated mission management system for UAS civil applications[C]. AIAA-2009-6294, 2009.
[4] Randy Black, Mitch Fletcher, Haowei Bai, et al. Applying Orion avionics architectural principles to space robotics[C]. AIAA-2007-6267, 2007.
[5] Pablo Royo, Juan Lopez, Cristina Barrado, et al. Service abstraction layer for UAV flexible application development[C]. AIAA-2008-484, 2008.
[6] 徐奡, 鄭毓琦. 長航時無人機飛行器管理計算機設計研究[J]. 航空計算技術, 2008, 38(4): 114-117. Xu Ao, Zheng Yuqi. Redundant vehicle management computer for high altitude long endurance unmanned aerial vehicle[J]. Aeronautical Computing Technique, 2008, 38(4): 114-117.(in Chinese)
[7] 於二軍, 吳斌, 李林, 等. 機載機電管理計算機雙余度設計[J]. 微電子學與計算機, 2012, 29(12): 88-90. Yu Erjun, Wu Bin, Li Lin, et al. Design of dual redundancy utility management computer[J]. Microelectronics and Computer, 2012, 29(12): 88-90.(in Chinese)
[8] 王少云. 某型機載任務管理系統的設計[J]. 無線電通信技術, 1998(2): 59-61. Wang Shaoyun. Design of an airborne task management system[J]. Radio Communications Technology, 1998(2): 59-61.(in Chinese)
[9] 陳國, 邊慶, 范超. 一種新型無人機小型化飛行器管理計算機的設計實現[J]. 電子技術與軟件工程, 2014(14): 185-186. Chen Guo, Bian Qing, Fan Chao. Design and implementation of a new type of UAV miniaturization aircraft management computer[J]. Electronic Technology and Software Engineering, 2014(14): 185-186.(in Chinese)
[10] 譚雁英, 趙榮椿, 祝小平, 等. 基于智能Agent的小型無人機自主飛行任務管理器的設計[J]. 西北工業大學學報, 2006, 24(6): 754-758. Tan Yanying, Zhao Rongchun, Zhu Xiaoping, et al. Intelligent Agent-based design and implementation of autonomous task manager for small UAVs[J]. Journal of Northwestern Polytechnical University, 2006, 24(6): 754-758.(in Chinese)
[11] 何成軍, 鄭旭洲. 綜合空氣管理計算機軟件設計[J]. 飛機工程, 2011, 4: 13-15. He Chengjun, Zheng Xuzhou. Software design of integration air management[J]. Aircraft Engineering, 2011, 4: 13-15.(in Chinese)
[12] 邢聯大, 蘇振華, 付雷, 等. 基于VxWorks的SAR信號處理的實現[J]. 電子科技, 2015, 28(6): 150-154. Xing Lianda, Su Zhenhua, Fu Lei, et al. Realization of SAR imaging signal processing based on VxWorks[J]. Electronic Science and Technology, 2015, 28(6): 150-154.(in Chinese)
[13] 朱峰, 周吉超, 趙起超. 一種基于VxWorks的導彈火控系統軟件實時多任務設計方法[J]. 數字技術與應用, 2015(3): 127-128. Zhu Feng, Zhou Jichao, Zhao Qichao. A real-time multitask design method for missile fire control system software based on VxWorks[J]. Digital Technology and Application, 2015(3): 127-128.(in Chinese)
[14] 陳福, 張曉紅, 趙剛, 等. 飛機機電綜合管理平臺應用任務調度方法研究[J]. 計算機測量與控制, 2016, 24(3): 255-257. Chen Fu, Zhang Xiaohong, Zhao Gang, et al. Research on application task scheduling method for aircraft electro-mechanical integrated management platform[J]. Computer Measurement and Control, 2016, 24(3): 255-257.(in Chinese)
[15] 王向軍, 張亞元, 張龍祥. 基于GPS和高精度實時時鐘的時間同步方法[J]. 納米技術與精密工程, 2016, 14(1): 66-70. Wang Xiangjun, Zhang Yayuan, Zhang Longxiang. Time synchronization based on GPS and high-accuracy real-time clock[J]. Nanotechnology and Precision Engineering, 2016, 14(1): 66-70.(in Chinese)
(編輯:馬文靜)
The Design of Mission Management Computer for a Certain UAV
Pi Zucheng, Wang Cheng, Chen Wen
(Special Aerial Vehicle Design Institute, China Academy of Aerospace Aerodynamics, Beijing 100074, China)
A certain UAV can mount kinds of payloads at the same time. A kind of mission management computer(MMC) is introduced to manage and make full use of those payloads. By analyzing the interface types and communication requirements of the existing on-board mission equipment, a task management computer with the capability of accessing existing equipment is designed. The computer adopts mature plug-in integrated design mode, and is of better flexibility and function expandability. All the payloads are controlled by MMC. Telemetry and telecontrol data message of the payloads is managed by MMC. The MMC provide synchronization timing service for external devices. Payload integration capabilities can be improved by designing the MMC, and achieve independence to run the task system and flight control system. Thus the safety of the UAV platform can be improved.
mission management computer(MMC); payload; UAV; synchronization timing
2016-09-27;
2016-10-26
陳文,392117912@qq.com
1674-8190(2016)04-464-07
V247.1;V279
A
10.16615/j.cnki.1674-8190.2016.04.011
皮祖成(1985-),男,碩士,工程師。主要研究方向:無人機載荷應用和任務管理。
王 誠(1981-),男,碩士,高級工程師。主要研究方向:無人機指控系統設計、無人機載荷應用。
陳 文(1986-),男,碩士,工程師。主要研究方向:無人機載荷應用、控制軟件設計。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
消費導刊(2017年20期)2018-01-03 06:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
工業設計(2016年12期)2016-04-16 02:52:00
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
