壓電驅動雙面快速指向鏡的設計
2016-12-19 02:30:58劉重飛苑自勇徐衛(wèi)明
光學精密工程 2016年11期
宋 盛,劉重飛,苑自勇,徐衛(wèi)明,舒 嶸,2*
(1.中國科學院 上海技術物理研究所 空間主動光電技術中科院重點實驗室,上海 200083;2. 中國科學大學 量子信息與量子科技前沿協(xié)同創(chuàng)新中心,安徽 合肥 230026)
?
壓電驅動雙面快速指向鏡的設計
宋 盛1,劉重飛1,苑自勇1,徐衛(wèi)明1,舒 嶸1,2*
(1.中國科學院 上海技術物理研究所 空間主動光電技術中科院重點實驗室,上海 200083;2. 中國科學大學 量子信息與量子科技前沿協(xié)同創(chuàng)新中心,安徽 合肥 230026)
考慮相干激光雷達對光束波前的要求,設計了壓電驅動雙面快速指向鏡系統(tǒng)以實現(xiàn)相干激光遙感探測的高精度大范圍指向定位。研究了系統(tǒng)的機械結構和電子學控制方法。結合指向角度、通光口徑及信號帶寬的實際工程應用需求,選擇了合理的致動器和位移放大機構。針對壓電陶瓷固有的遲滯和蠕變等非線性效應,設計了以應變片作為位移傳感器的模擬比例-積分-微分(Proportion Intergration Differentiation,PID)閉環(huán)反饋控制方法。在仿真分析指向鏡固有模態(tài)頻率的基礎上,確定了周邊支撐的反射鏡支撐方式。實驗結果表明,該指向系統(tǒng)能夠達到指向范圍為27 mrad×27 mrad、絕對定位精度優(yōu)于27 μrad、偏轉速率為2.7 rad/s的指標,基本滿足激光遙感探測對探測范圍、探測精度、探測速率等指向定位的要求。
相干探測;激光雷達;壓電驅動;快速指向鏡;模擬PID
1 引 言
在現(xiàn)代空間探測工程、軍事偵測、工業(yè)與醫(yī)療設備等國防和國民經濟重大相關的課題中,光束的精密指向、跟蹤與定位技術已成為不可缺少的重要組成部分。在空間光通信系統(tǒng)中,由于光束發(fā)散角小、接收天線視場窄,通信雙方必須對對方光學天線進行精確的瞄準和跟蹤,保證光束對準,才能建立良好的通信鏈路。在大氣光學應用領域,要求光學天線和光學系統(tǒng)能夠快速精確控制光束的指向,以補償大氣擾動、載體振動共同引起的光束偏轉和成像噪聲[1-5]。
西方發(fā)達國家現(xiàn)在對于快速指向鏡(Fast Steering Mirror,F(xiàn)SM)的研究已步入成熟階段,德國PI公司作為微驅動領域的先驅,其研發(fā)的高精度指向鏡廣泛應用于空間通信、光學相移補償、顯微成像等領域。法國CEDRAT公司生產的壓電驅動工作臺被應用于多種星載精密光學系統(tǒng)中。國內的研究起步較晚,中科院光電技術研究所、西安205所以及中科院長春光學精密機械與物理研究所等單位在高精度指向方面做了大量研究,也取得了較好的成果[6-8]。
在激光遙感探測領域,相干激光雷達對光束波前要求較高,探測器接收視場較小。在對光束進行掃描指向的應用場合,接收回波時需要對發(fā)射到自由空間的光束進行實時的角度補償。采用兩面指向鏡很難做到發(fā)射的掃描角度和補償?shù)幕夭ń嵌韧健6捎猛幻骁R子的正反兩面能夠有效保證轉角的一致性,達到補償回波發(fā)射偏角的目的,使得探測器上接收的角度相對固定。因此,設計出能夠實現(xiàn)雙面快速指向的快反鏡系統(tǒng)對于工程實踐具有重要意義。
2 雙面快速指向鏡結構設計
柔性軸式快速指向鏡結構主要包括:致動器、位移放大機構和柔性支撐結構,目前比較活躍的是精確快速的反射鏡柔性支撐結構設計與新型輕量化反射鏡[9-12]。在實際設計中,指向角度的范圍決定了致動器位移的大小;通光口徑決定了反射鏡的鏡面大小;快反鏡諧振頻率限制了工作信號帶寬。圖1所示為雙面快速指向鏡的結構示意圖。壓電指向鏡采用四驅動-兩軸方式,即對角線的壓電驅動器構成差分頂拉結構,驅動鏡片平臺的偏轉。強度大的鏡面平臺由柔性機構鏈接到外部框架上,可以無間隙的連續(xù)偏轉。

圖1 雙面快速指向鏡結構示意圖
2.1 致動器選擇
通常音圈電機、壓電陶瓷和磁致伸縮材料都可用來驅動柔性支撐的FSM。壓電驅動器是利用壓電體逆壓電效應形成機械驅動或控制能力的裝置,驅動器將變形或振動直接作用于從動件實現(xiàn)機械驅動或機械控制,而非傳統(tǒng)驅動器那樣需要先形成旋轉再經轉換成為目標動力或運動,此類裝置具有結構簡單、可控性好、響應速度快、輸出力大、換能效率高等優(yōu)點。除此之外,壓電陶瓷能夠達到納米級的位移精度,這在超精密定位和微位移控制中是其它驅動器所無法比擬的,本設計要求中對位移分辨率較高,因此壓電陶瓷驅動更適合。單層陶瓷片的變形量比較小,所以在實際應用中,通常采用多層的壓電陶瓷堆疊結構,其伸長量與所加電壓的關系為:
ΔL=N·E·d·L0,
(1)
其中:ΔL為壓電堆疊總伸長量;N為壓電陶瓷片數(shù)目;E為施加的電場強度;d為壓電系數(shù);L0為單片壓電陶瓷片的厚度。設計中采用的壓電陶瓷參數(shù)如表1所示。

表1 壓電陶瓷矩形致動器基本參數(shù)
2.2 位移放大機構
壓電陶瓷致動器具有較高的位移分辨率,但同時也存在著輸出位移小的缺點。在有大行程工作要求的情況下,需要對壓電陶瓷的輸出位移進行放大和導向。柔性鉸鏈微位移放大機構基于杠桿原理,能夠實現(xiàn)對微位移的有效放大,其工作原理如圖2所示。壓電陶瓷在A點產生豎直向上的位移,B點相當于一級杠桿的支點,使D點產生一級放大的位移。C點相當于二級杠桿的支點,由此E點產生二級放大的位移。經仿真分析,兩級杠桿式微位移放大結構可將位移放大15倍,拓展了壓電致動器的工作行程,可彌補其輸出位移小的缺點。

圖2 位移放大機構
3 雙面快速指向鏡驅動控制設計
壓電驅動雙面指向鏡的驅動控制原理如圖3所示,以其中一個軸示意,兩個壓電陶瓷驅動器均為堆疊結構,堆疊A的負極接地,正極與堆疊C的負極相連構成控制輸入端U,堆疊C的正極連接到基準電平150 V。當U為75 V時,施加在堆疊A和堆疊C上的電壓量相同,因此兩堆疊的伸長量相同,鏡面平臺沒有偏角;當U為150 V時,堆疊A的壓差為150 V伸長量最大,而堆疊C所受壓差為0 V無伸長量,鏡面平臺以紙面垂線為軸右偏轉到最大角度。同理,當U為0 V,鏡面左偏最大角度。

圖3 快反鏡工作原理
3.1 位移傳感器
壓電陶瓷致動器存在著遲滯和蠕動等非線性因素,如不加處理,會對其應用產生影響。本文設計的指向鏡采用4個正方形排布的壓電陶瓷,對角線的2個陶瓷構成一維調整結構,陶瓷的連接如圖4所示。每個壓電陶瓷上黏有2片電阻應變片,作為位移傳感器。電阻應變片是基于應變效應制作的,導體材料在外界力的作用下產生機械形變時,其電阻值相應的會發(fā)生變化。位移傳感器的一維反饋模型如圖5所示。每一維的4個應變片組成全橋結構,將陶瓷的位移變化轉變?yōu)殡娮柚档淖兓偻ㄟ^差分放大器將電信號放大輸出給低通濾波器,低通濾波器能夠將信號中的高頻雜波濾除,最終作為控制單元的反饋信號。

圖4 壓電陶瓷連線示意圖

圖5 一維反饋模型
反饋模型中電阻應變片的全橋分布方式不僅可以有效檢測出陶瓷的位移變化,還能夠消除電阻值溫漂帶來的影響。全橋電路的電信號輸出可以通過R0微量調節(jié),使信號值在初期調試時能夠調節(jié)到一個相對零點,彌補4個應變片阻值不一致帶來的電壓偏差。差分放大器檢測全橋電路的輸出信號,通過調整放大倍數(shù)使輸出調節(jié)到一個相應的變化范圍,從而精確閉環(huán)整個控制回路。
3.2 閉環(huán)驅動控制
對二維壓電指向平臺的驅動控制回路采用閉環(huán)設計,控制流程原理框圖如圖6所示。當圖像處理主控單元解算得到目標質心位置后,通過高精度數(shù)模轉換器將位置值轉換為0~10 V的軸控制信號。

圖6 指向鏡閉環(huán)驅動控制原理框圖
斜率控制器限制目標值信號的變化速率,防止過快的信號變化損害指向鏡,系統(tǒng)中將信號變化速率限制在2 V/ms以下。開環(huán)閉環(huán)選擇的靈活設計便于在前期調試時對應變片反饋信號進行調整,使反饋信號與控制信號的變化范圍一致。PID控制模塊將控制命令信號和傳感器反饋信號進行比較,產生功率放大器的信號,實現(xiàn)快速精確的閉環(huán)控制。壓電指向鏡具有豐富的高頻諧振分量,必須加以抑制,否則很容易引起諧振現(xiàn)象,對機構造成損壞。典型的措施是在功放電路前面加陷波器,陷波器的中心頻率為諧振頻率,并能調節(jié)帶寬。功率放大器將0~10 V的控制信號進行電壓和功率放大至0~150 V,以驅動壓電陶瓷。
4 實驗與分析
實驗所用儀器為自準直儀,自準直儀是高精度角度測量儀器,多用于航空航天、船舶、軍工等要求精密度極高的行業(yè),其結構簡單,體積小,精度高,使用方便,不但可以進行角度測量,也可以進行直線度、垂直度和平面度測量。
其工作原理如圖7所示,光線通過位于物鏡焦平面的分劃板后,經物鏡形成平行光。平行光被垂直于光軸的反射鏡反射回來,再通過物鏡后在焦平面上形成分劃板十字標線像與標線重合。當反射鏡傾斜微小角度α角時,反射回來的光束就傾斜2α角。
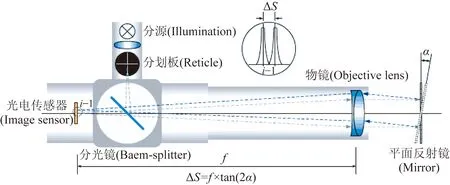
圖7 自準直儀工作原理
4.1 指向角度范圍
指向角度測量過程中,將0~10 V的控制電壓均分成20個點測試,即每次增加0.5 V的控制電壓。由于自準直儀測量范圍有限,無法在指向鏡的全行程范圍內進行測試,因此調整為測量相鄰兩點之間的機械偏轉角,最終的偏轉角由累加求得。每個點測量200個數(shù)據(jù),求均值作為該點偏轉角度值,將數(shù)據(jù)繪制成點狀如圖8、圖9所示。由測試數(shù)據(jù)可知,X軸和Y軸的全行程偏轉范圍為27 mrad×27 mrad。
對于不同控制命令電壓下指向鏡X軸和Y軸的偏轉角度,進行一階線性擬合并求出兩軸的線性度,兩軸的全量程非線性誤差在0.1%以內。對于測試的指向鏡,其全程范圍為27 mrad,因此絕對定位精度在27 μrad以下。

圖8X軸偏轉角度和非線性誤差系數(shù)
Fig.8 Deflection angle and non-linear error coefficient ofX-axis

圖9 Y軸偏轉角度和非線性誤差系數(shù)
4.2 指向分辨率
指向鏡的指向分辨率受模數(shù)轉換器輸出電壓分辨率的影響,模數(shù)轉換器輸出分辨率越高,指向鏡的指向分辨率就越高。采用輸出電壓為0~10 V、分辨率12 bit的高精度模數(shù)轉換器,其輸出電壓分辨率為:

(2)
由此可得指向鏡的指向分辨率為:

(3)
4.3 偏轉速率
指向鏡的偏轉速率通過測量應變片反饋信號上升沿時間間接測得。測試過程中,指向鏡控制器輸入一頻率為10 Hz、幅值為10 V的方波激勵,通過示波器測得X軸和Y軸的應變片反饋信號上升沿時間為10 ms,如圖10所示。

圖10 反饋信號上升沿時間測量
指向鏡的偏轉速率為:

(4)
5 結 論
本文以相干激光雷達實際工程需求為背景,系統(tǒng)介紹了壓電驅動雙面快速指向鏡的設計與實現(xiàn)方法。針對應用需求,合理選擇致動器與位移放大機構,在仿真分析指向鏡固有模態(tài)頻率的基礎上,確定了周邊支撐的反射鏡支撐方式。在電子學控制部分,設計了以應變片為位移傳感器的模擬PID閉環(huán)反饋控制方法,有效克服壓電陶瓷固有的磁滯和蠕變效應。實驗結果證明,本指向鏡能夠達到指向范圍27 mrad×27 mrad、指向精度27 μrad、偏轉速率2.7 rad/s的指標,基本滿足了相干激光遙感探測應用中的要求。
[1] 魯亞飛. 快速反射鏡機械結構特性設計問題研究[D]. 長沙:國防科技大學,2009. LU Y F.ResearchonFast/FineSteeringMirrorsystem[D]. Changsha:National University of Defense Technology, 2009.(in Chinese)
[2] 張麗敏,郭勁,陳娟. 快速反射鏡機械結構研究綜述[J]. 光機電信息,2005,3:21-25. ZHANG L M, GUO J, CHEN J. Summary of the mechanic structure for fast-steering mirrors [J].OmeInformation, 2005, 3:21-25.(in Chinese)
[3] 吳博達,鄂世舉,楊志剛,等. 壓電驅動與控制技術的發(fā)展與應用[J]. 機械工程學報,2003,39(10):79-86. WU B D, E SH J, YANG ZH G,etal..Development and application of piezoelectric actuation and control [J].ChineseJournalofMechanicalEngineering, 2003, 39(10):79-86.(in Chinese)
[4] SWEENEY M, RYNKNOWSKI G, KETABCHI M. Design considerations for fast steering mirror [J].SPIE, 2002, 4773: 63-73.
[5] FRANCISC M T, DEREK J E, TIMOTHY R H,etal.. High band width fast steering mirror [J].SPIE, 2005, 5877:1-14.
[6] 徐飛飛,紀明,趙創(chuàng)社. 快速偏轉反射鏡研究現(xiàn)狀及關鍵技術[J]. 應用光學,2010,31(5):847-851. XU F F, JI M, ZHAO CH SH. Status of fast steering mirror [J].JournalofAppliedOptics, 2010, 31(5):847-851.(in Chinese)
[7] 徐新行,韓旭東,王兵,等. 機載剛性支撐式快速控制反射鏡設計[J]. 光學精密工程,2016,24(1):126-133. XU X X, HAN X D, WANG B,etal..Design of fast steering mirror with rigid support structure for airborne platform [J].Opt.PrecisionEng., 2016, 24(1):126-133.(in Chinese)
[8] 楊立斌. 納米級微定位平臺的設計及實驗研究[D]. 天津:天津大學,2005. YANG L B.TheDesignandExperimentalResearchofNano-PositioningTable[D]. Tianjin:Tianjin University, 2005.(in Chinese)
[9] 魯亞飛,范大鵬,范世珣,等. 快速反射鏡兩軸柔性支承設計[J]. 光學 精密工程,2010,18(12):2574-2583. LU Y F, FAN D P, FAN SH X,etal.. Design of two-axis elastic support for fast steering mirror [J].Opt.PrecisionEng., 2010, 18(12):2574-2583.(in Chinese)
[10] 盧倩,黃衛(wèi)清,孫夢馨. 基于柔度比優(yōu)化設計杠桿式柔性鉸鏈放大機構[J]. 光學 精密工程,2016,24(1):102-111. LU Q, HUANG W Q, SUN M X. Optimization design of amplification mechanism for level flexure hinge based on compliance ratio [J].Opt.PrecisionEng., 2016, 24(1):102-111.(in Chinese)
[11] 陳美文. 微小型掃描反射鏡的柔順機構設計及仿真建模[D]. 西安:西安電子科技大學,2012. CHEN M W.TheDesignandSimulationModelingofCompliantMechanismofMicroScanningMirror[D]. Xi’an:Xidian University, 2012.(in Chinese)
[12] 林潔瓊,王磊,李迎春,等. 基于有限元的柔性鉸鏈微位移放大機構設計[J]. 機床與液壓,2009,37(10):21-23. LIN J Q, WANG L, LI Y CH,etal..Design for micro-displacement magnification mechanism of flexible hinge based on finite element method [J].MachineTool&Hydraulics, 2009, 37(10):21-23.(in Chinese)

舒 嶸(1971-),男,浙江溫嶺人,博士,研究員,1992年于合肥工業(yè)大學獲得學士學位,主要從事空間激光遙感與探測技術方面的研究。E-mail: shurong@mail.sitp.ac.cn
(版權所有 未經許可 不得轉載)
Design of double-sided fast steering mirror based on piezoelectric actuating
SONG Sheng1, LIU Chong-fei1, YUAN Zi-yong1, XU Wei-ming1, SHU Rong1,2*
(1.Key Laboratory of Space Active Opto-Electronics Technology,ShanghaiInstituteofTechnicalPhysics,ChineseAcademyofSciences,Shanghai200083,China;2.SynergeticInnovationCenterofQuantumInformationandQuantumPhysics,UniversityofScienceandTechnologyofChina,Hefei230026,China)
According to the requirements of laser radars for beam wavefront, a piezo-activated double-sided and fast-steering mirror was designed to realize the high-accuracy beam pointing and wide scanning range of a coherent laser remote system. The mechanical structure of the system and its electronics control method were researched. In consideration of the system requirements for the point angle, clear aperture and the signal bandwidth, an actuator and a displacement amplification mechanism were chosen. To overcome the nonlinear effect of piezoelectric ceramics, such as hysteresis and creep, an analog Proportion Intergration Differentiation(PID) closed-loop feedback control method by taking a strain gauge as the displacement sensor was designed. By analysis of the natural modal frequencies of the pointing mirror, the circum support was determined as the mirror support manner. Experimental results indicate that the pointing accuracy and scanning speed of the system are respectively 27 μrad and 2.7 rad/s at the range of 27 mrad×27 mrad, which satisfies the requirements of laser remote sensing for detection ranges, detection accuracy and detection speeds.
coherent detection; laser radar; piezo-actuating;fast steering mirror; analog PID
2016-05-10;
2016-06-17.
國家自然科學基金資助項目(No.2014AA7100012)
1004-924X(2016)11-2777-06
TN958.98;TP722
A
10.3788/OPE.20162411.2777

宋 盛(1990-),男,上海青浦人,博士研究生,2012年于華東師范大學獲得學士學位,主要從事紅外圖像處理、激光遙感探測方面的研究。E-mail: songsheng03@126.com
*Correspondingauthor,E-mail:shurong@mail.sitp.ac.cn
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00