可編程數字隔離模塊在火炮CAN總線網絡中的應用
2016-12-20 11:17:22徐建峰崔立君盧青山
火炮發射與控制學報 2016年4期
關鍵詞:信號
姜 飛,徐建峰,崔立君,王 琨,盧青山
(西北機電工程研究所,陜西 咸陽 712099)
?
可編程數字隔離模塊在火炮CAN總線網絡中的應用
姜 飛,徐建峰,崔立君,王 琨,盧青山
(西北機電工程研究所,陜西 咸陽 712099)
CAN通信廣泛應用于自行火炮、坦克裝甲等車輛武器系統,出于對產品本身安全性的考慮或抗電磁兼容等方面要求,需盡可能控制并減少信號激勵源與被測系統之間的相互干擾,基于CPLD技術實現的可編程數字隔離模塊能有效阻斷CAN檢測節點物理層差分電氣連接,以保護被測試CAN總線網絡。實踐應用表明該模塊穩定性好、實時性強、可移植度高且外部供電單一,具有廣泛的通用性、良好的應用前景和使用價值。
CAN總線隔離;CPLD邏輯控制;CAN總線通信;Verilog程序設計
CAN是控制網絡(Control Area Network)的簡稱,屬于串行數據通信總線范疇,由德國BOSCH公司提出,符合ISO 11898標準,CAN通信適用于部件之間進行數據交換,廣泛應用于工業離散控制與國防軍工領域,具有成本低、可靠性高并易于實現等技術優點[1],一般情況下出于網絡系統本身安全性考慮或抗電磁兼容試驗要求,為控制并減少信號激勵源與被測對象之間的相互干擾,需要對CAN總線網絡測試接口進行差分電平隔離設計[2]。
1 技術原理
1.1 應用背景
常規CAN接口差分電平隔離設計主要有兩種途徑:
1)采用網關方式,利用單片機等微控制器進行數據鏈中繼以完成CAN總線接口的信號轉換,其顯著弊端在于微控制器不僅需要具備較高的運算能力,同時還要設計2套相互獨立工作的CAN總線軟硬件接口,系統復雜、實時性差,且在不同網絡之間進行通信時要重新配置通信參數,可移植性差。
2)單純以物理差分電平值為設計依據,通過適配專用電源供給模塊和光電隔離器來實現CAN接口隔離通信,優點在于成本低廉,但缺點也是非常明顯,需要用+5、+4、+2.5、+1.5和+3 V等多品種電壓源與高精度分壓電阻配合,電路結構復雜、器件品質與溫控性能要求非常高,抗干擾能力差,電壓稍微產生偏離就會造成CAN總線接口隔離通信異常,還會將該故障直接反饋到被測CAN總線網絡,很不實用。
考慮到當前這種技術現狀,筆者提出了一種基于可編程邏輯控制器的CAN接口差分電平隔離設計方法,可有效克服上述兩種方案的缺點,提高CAN接口隔離通信的可靠性與抗干擾能力。另外,基于CPLD所實現的可編程控制邏輯理論上可以由74系列器件搭接組合完成,但缺少精確時隙控制能力,在高負載率情況下不具備全雙工通信能力,相對而言靈活性差、集成度也較低,不推薦這種低層次技術替代[3]。
1.2 信號位電平
CAN總線信號電平由CANH與CANL之間電壓差Udiff=UCANH-UCANL表示。CAN總線網絡具有兩種邏輯狀態,即顯性狀態與隱性狀態,分別與信號傳輸過程中顯性位和隱性位對應,隱性狀態時Udiff近似為0 V,而顯性狀態時Udiff則一般為2~3 V。若總線上2個不同節點在同一位時間分別強加顯性位與隱性位,競爭仲裁結果是總線上呈現顯性位,即顯性位可以改寫隱性位。硬件設計時需要將總線驅動器的RXD與TXD引腳分別引入到CPLD可編程邏輯控制器的IO端口上,使其TTL電平與CAN總線上輸出隱性電平保持一致。具體到總線信號電平的對應關系是:當TXD=0時,CAN總線上輸出顯性電平;當TXD=1時,CAN總線上輸出隱性電平[4]。
1.3 位定時與同步
可編程數字隔離模塊工作于數據通傳方式下,左右網絡之間進行數據交換時不對報文進行任何打包與拆包操作處理,也不會將CAN總線數據鏈路層波特率、幀格式、濾波方式和ID標識符等參數作為設計輸入,只以RXD和TXD引腳TTL電平為判定標準,按照CAN通信規范進行數字化編程,無需任何中間轉換過程,具有良好的通用性、可移植性與實時性。
CPLD編碼過程中必須依據CAN總線邏輯狀態進行延時處理,具體數值由物理層電氣特性和信號發送方式來決定,涉及到位定時與同步兩方面內容。位時間(屬于位定時重要指標參數)是指非重同步情況下,總線驅動器發送一個數據位所需的時間,它可分為多個互相不重合的時間段,一般由同步段、傳播段、相位緩沖段1和相位緩沖段2等組成,排列方式如圖1所示。
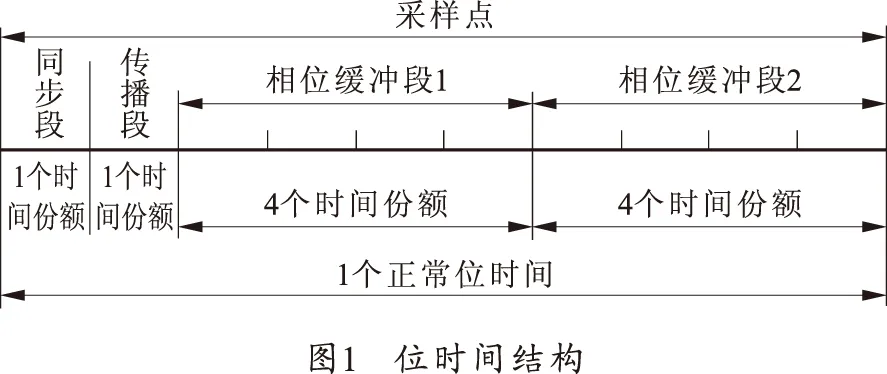
一般情況下最小額定位定時與最大速率處于單次采樣周期內是一一對應,決定了一段時間內的數據傳輸量,另外2個與位時間相關聯的參考量是傳播延遲與采樣點位置,前者限定了系統之間2個節點間的最大總線長度,采樣點越靠后則播延遲會有更大的容差性,CPLD邏輯控制軟件設計延時因子其刻度會更精確,最大位速率計算公式為
vBR_max=fkq/2
式中:k為比例因子系數;q是位定時段;f為振蕩器頻率。高位速只會出現在系統傳播延遲很小的時候,對于網絡兩端時間延遲最大的節點,必須保證它們能夠正確地接收和譯碼傳輸信息報文。
CAN總線規范中同步機制克服了節點間累積相位誤差影響,可有效地保證報文進行正確譯碼。同步可分為硬同步與重同步兩種,前者在報文幀開始時執行,后者發生在隱性位到顯性位的跳變沿時刻。因此同步段需要有跳變沿信號,這是可編程數字隔離模塊通信的觸發基準,它們都遵守下述規則:在一個時間位內僅允許一種同步;對于跳變沿,僅當它前面的第1個采樣點數值與緊跟該跳變沿之后的總線值有差異時,才能將該跳變沿用于同步;在總線空閑期,若出現1個隱性位到顯性位跳變沿,則執行1次硬同步;符合前兩條規則的隱性位到顯性位跳變沿都被用于重同步,但具有正相位誤差的隱性位到顯性位跳變沿將不會導致重同步。
2 硬件構成
可編程數字隔離模塊電路由4片ADM3053集成芯片和EPM7032STI44-7可編程邏輯控制器、MAX813L復位芯片和16 MHz有源晶振、ISP程序下載接口以及若干分離阻容器件等組成,主要集成芯片之間電氣連接與信息流傳輸關系如圖2所示。

ADM3053是一款光電耦合隔離式CAN收發器,具有限流和熱關斷特性,可有效防止輸出短路,采用ADI公司iCouple?技術將常規雙通道隔離器、CAN總線收發器和DC/DC轉換器集成。可片內振蕩器輸出方波,結合高頻開關元件驅動內部變壓器產生隔離電源,只需要+5V單電源供電就可以在CAN協議控制器與物理層總線之間創建一個完全隔離的CAN總線接口,可完全替代“6N137光電耦合器+DC/DC轉換器+PCA82C250收發器”的傳統解決方案,因為集成度高,所以能有效降低PCB布局與布線難度、提升可編程數字隔離模塊的穩定性與可靠性。2片ADM3053集成電路可構成1路CAN通信隔離通道,依據Verilog硬件描述語言進程間并發運行的特點,該模塊能提供2路相互獨立的CAN通信隔離通道,兩者間無主次之分,電路結構與元器件的編排左右對稱,因此網絡數據流輸出與輸入方向可進行交叉互換處理,容錯度極高。
MAX813L復位電路于上電瞬間產生140 ms上升沿脈沖,對EPM7032STI44-7可編程邏輯控制器進行復位操作,以確定CAN總線初始邏輯狀態,因為CAN總線要求:總線處于空閑期時,網絡節點的缺省方式必須是隱性狀態,即TXD引腳為邏輯1,處于高電平狀態。MAX813L集成電路也具備按鍵復位功能,如果隔離輸出信號產生非穩定跳變則可進行手動復位操作。
16 MHz有源晶振為時序邏輯提供檢測基準,其周期T=62.5 ns是精準延時的最小計數單元,該參數應用于位定時與同步控制邏輯設計。ISP程序下載接口為可編程數字隔離模塊提供在線可編程功能。分離阻容器件中的耦合電容用于濾除總線前端的高頻干擾;限流電阻則用于保護總線收發器不受過流沖擊影響;動態電阻可調節CAN總線差分信號邊沿傾斜狀態,通過控制速率來降低電磁輻射影響;匹配電阻用于抑制信號電纜在端點的反射。
3 軟件設計
可編程數字隔離模塊CPLD控制邏輯通過Verilog HDL硬件描述語言來實現,集成編譯環境是Quartus II 5.1版本。首先借助于“應用向導”建立工程項目,給出工程所在的設計路徑、文件名稱與實體名;然后對標準支持庫進行聲明操作;其次按照外部接口給出引腳信號名稱、數據類型及輸入/輸出方向,通過寄存器變量對標志信號和延時矢量作出說明。軟件流程如圖3所示。
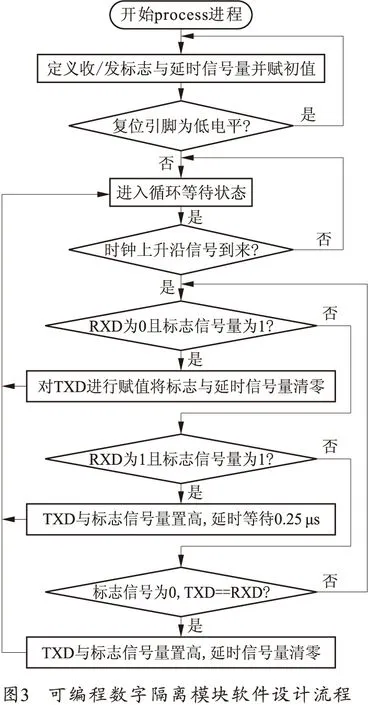
邏輯代碼段編程時在process并行進程中以全局時鐘上升沿作為判斷基準,利用if語句對復位引腳進行狀態檢測。若是低電平則對標志信號和延時矢量進行清零操作處理并將TXD引腳置高電平,實現低電平復位功能,否則持續對RXD引腳“顯/隱”性狀態進行判斷;如果RXD引腳低電平且配對通道另一端標志信號量為1狀態,則通過賦值操作完成數據通傳處理,否則就對標志信號進行置位并精確延時0.25 μs后進入循環等待狀態,精確延時很關鍵,需要在轉換效率與響應速度之間取得平衡[5]。
4 性能測試
現場試驗過程中使用如下設備和儀器:YOKOGAWA總線分析儀、USBCAN測試盒以及CANStressDR網絡干擾儀。USBCAN測試盒作為信號源發生源與隔離輸出數據接收裝置,分別將2路相互獨立的CAN總線通道接入可編程數字隔離模塊左右信號端,設置幀間隔時間為0,以最大負載和數據吞吐狀態進行轉換收發,觀察是否存在信息幀丟失現象。YOKOGAWA總線分析儀用于展現CAN數據幀波形、分析上升沿與下降沿斜率,完成位時間和最小發送間隔以及最大負載率等功能性測試。CANStressDR網絡干擾儀對輸入CAN網絡注入拉偏電壓,并對采樣點位置進行測試干擾,以評估可編程數字隔離模塊的整體健壯性。所有試驗項檢測依據為《SEA J1939-11 Revised OCT1999標準》和《CAN總線網絡通信測試規范》,相應測試項、用例情況以及合格性判據如表1所示,相關試驗波形如圖4所示。
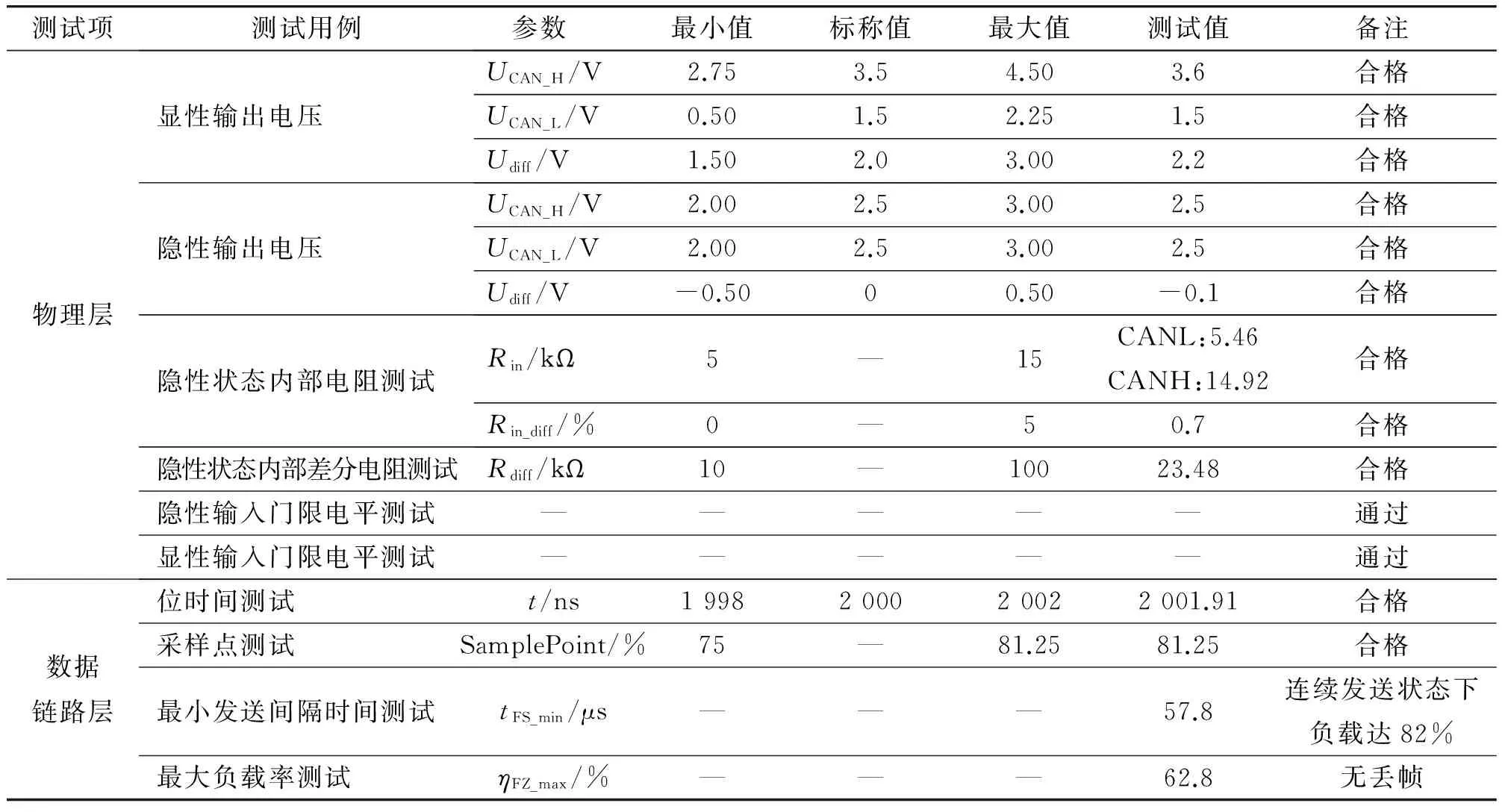
表1 可編程數字隔離模塊性能測試結果匯總

表1中位時間t=ΔT/(數據位+填充位)。按照相應CAN總線規范,數據位中每5個連續“1”會自動增加1個填充位,對于不同的信息幀,公式中的分母值會有所不同,所以必須用總線分析儀等檢測工具來測試ΔT值并讀出信息幀的位脈沖個數,從而得到位時間t=262.25/131=2.001 908 μs,經四舍五入處理取小數點后2位則為2 001.91 ns[6]。
5 結束語
可編程數字隔離模塊已成功應用于某型彈炮結合武器系統中繼測試終端,通過該可編程數字隔離模塊能有效地實現被測試武器系統與外部監測模塊之間的物理隔離,阻斷外部測試設備對武器系統內部單體的干擾。靶場試驗表明該可編程數字隔離模塊具有可靠性高、功耗低、成本小、抗干擾能力強等特點,具有廣泛的通用性,可進一步向工業應用領域推廣。
References)
[1]陽憲惠. 現場總線技術及其應用[M]. 北京:清華大學出版社,2008. YANG Xianhui.Locale bus technique and application[M].Beijing: Tsinghua University Press, 2008.(in Chinese)
[2]李真花.CAN總線輕松入門與實踐[M].北京:北京航空航天大學出版社,2011. LI Zhenhua.Can bus easy accidence and practise[M].Beijing:Beihang University Press,2011. (in Chinese)
[3]王黎明.CAN現場系統的設計與應用[M]. 北京:電子工業出版社,2008. WANG Liming. Can bus system design and application[M].Beijing: Publishing House of Electronics Industry,2008. (in Chinese)
[4]王凱.武器裝備作戰試驗[M]. 北京:國防工業出版社,2011. WANG Kai. Weapon system warfare test[M].Beijing: National Defense Indutry Press,2011. (in Chinese)
[5]夏宇聞.Verilog數字系統設計教程[M]. 北京:北京航空航天大學出版社,2008. XIA Yuwen. Verilog numeric system design tutorial[M].Beijing: Beihang University Press,2008. (in Chinese)
[6]楊莉,趙薇,沈映泉,等.基于網絡隔離器的現場作業日報系統[J].計算技術與自動化,2015,16(15):132- 135. YANG Li,ZHAO Wei,SHEN Yingquan,et al. Site operations reporting system based on the network separator[J].Computing Technology and Automation, 2015,16(15):132-135. (in Chinese)
Application of Programmable Digital Segregate Module in Gun’s CAN Network
JIANG Fei, XU Jianfeng, CUI Lijun, WANG Kun, LU Qingshan
(Northwest Institute of Mechanical & Electrical Engineering, Xianyang 712099, Shaanxi, China)
CAN communications are widely applied in the vehicle weapon system, such as self-propelled artillery, tank and armored vehicle. According to the consideration of security of this product and anti-electromagnetic compatibility requirements and so on, the mutual interference between signal inspiriting source and tested system should be controlled and reduced to the utmost degree. The realization of programmable digital isolation module based on CPLD can effectively block the electrical connection of CAN detection node physical layer difference to protect the network of the tested CAN bus. This practical application indicates the module has a favorable stability property, a strong real-time performance and a single external power supply, which has a wide range of universality, good application prospects and use value.
CAN bus segregate;CPLD logic control;CAN bus communication;Verilog program design
10.19323/j.issn.1673-6524.2016.04.010
2015-10-18
姜飛(1978—),男,高級工程師,碩士,主要從事火炮綜合電子技術研究。E-mail:jfxsj@126.com
TJ393
A
1673-6524(2016)04-0043-05
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
