基于改進定子磁鏈觀測器的MRAS轉速估算方法
2016-12-20 07:03:40蔡文皓單成龍范中洋
微特電機 2016年7期
關鍵詞:模型
蔡文皓,單成龍,范中洋
(西安科技大學,西安 710054)
?
基于改進定子磁鏈觀測器的MRAS轉速估算方法
蔡文皓,單成龍,范中洋
(西安科技大學,西安 710054)
提出一種在定子坐標系下以定子側變量為狀態變量的轉速估算方法,減少系統的復雜性,完全不受轉子側參數影響。在此基礎上將改進低通濾波器作為定子磁鏈觀測器,大大減小系統的直流偏置誤差和初始值誤差。通過仿真驗證了該方法具有較強的魯棒性并能很好地估算轉速,提高磁鏈觀測精度。
異步電機;無速度傳感器;直接轉矩控制;低通濾波器;模型參考自適應系統
0 引 言
在傳統直接轉矩控制系統中,定子磁鏈的觀測方法通常采用純積分器即基于u-i模型的觀測方法,當電機運行于低速域時模型中的純積分環節本身所固有的直流偏置誤差和初始值誤差將嚴重影響定子磁鏈的觀測精度,導致轉矩脈動增大進而影響電機的穩定運行。針對上述問題,文獻[1]中以一階低通濾波器來代替純積分器,通過選擇合適的截止頻率來抑制積分環節所產生的直流偏置誤差,然而采用低通濾波器又將會產生新的定子磁鏈幅值和相位誤差。在此基礎上引入閉環幅值補償環節來消除直流偏置誤差,提高定子磁鏈的觀測精度。
在高性能異步電機變頻調速系統中,速度反饋環節往往是必不可少的,但高精度、高分辨率的編碼器不僅價格昂貴,而且還受環境、溫度等因素的影響,故越來越多的學者投入到無速度傳感器直接轉矩控制系統的研究中。國內外學者提出了許多轉速估算方法,其中應用最為廣泛的應屬模型參考自適應法,該方法具有模型簡單,易于實現,魯棒性強等特點,現已廣泛應用于變頻調速系統中。在傳統模型參考自適應方法利用轉子側變量估算轉速的基礎上,提出一種完全基于定子側變量的MRAS轉速估算方法,直接在定子坐標系下分析和計算異步電機的數學模型,控制電機的磁鏈和轉矩,完全不需要計算轉子磁鏈,即可估算轉速,并且在低速下也具有良好的性能。
1 改進低通濾波器的定子磁鏈觀測器
兩相靜止坐標系下,由異步電機的基本方程可得定子反電動勢方程[2]:
(1)
由式(1)可得定子磁鏈在αβ坐標系下的分量:
(2)
為了解決純積分器帶來的直流偏置和初始值問題采用一階低通濾波器帶替純積分器[3]。
(3)
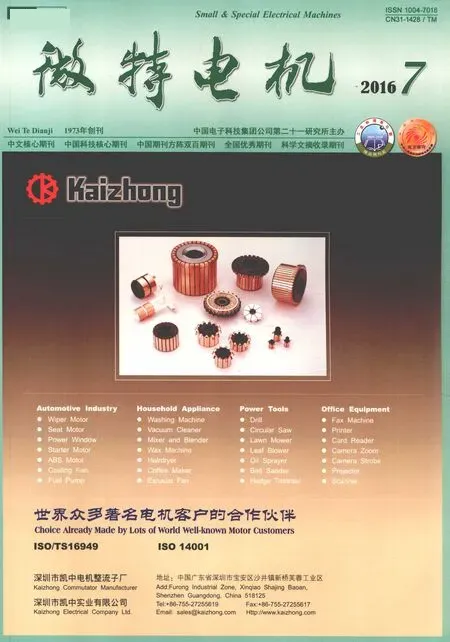
式(3)在一定程度上減少了由純積分器帶來的直流偏置誤差。然而,當低通濾波器的截止頻率ωc小于或接近于定子頻率時,將造成新的幅值和相位誤差。因此在低通濾波器的基礎上加入閉環幅值補償環節,可以很好地補償低通濾波器產生的幅值和相位誤差。改進定子磁鏈觀測器結構如圖1所示。
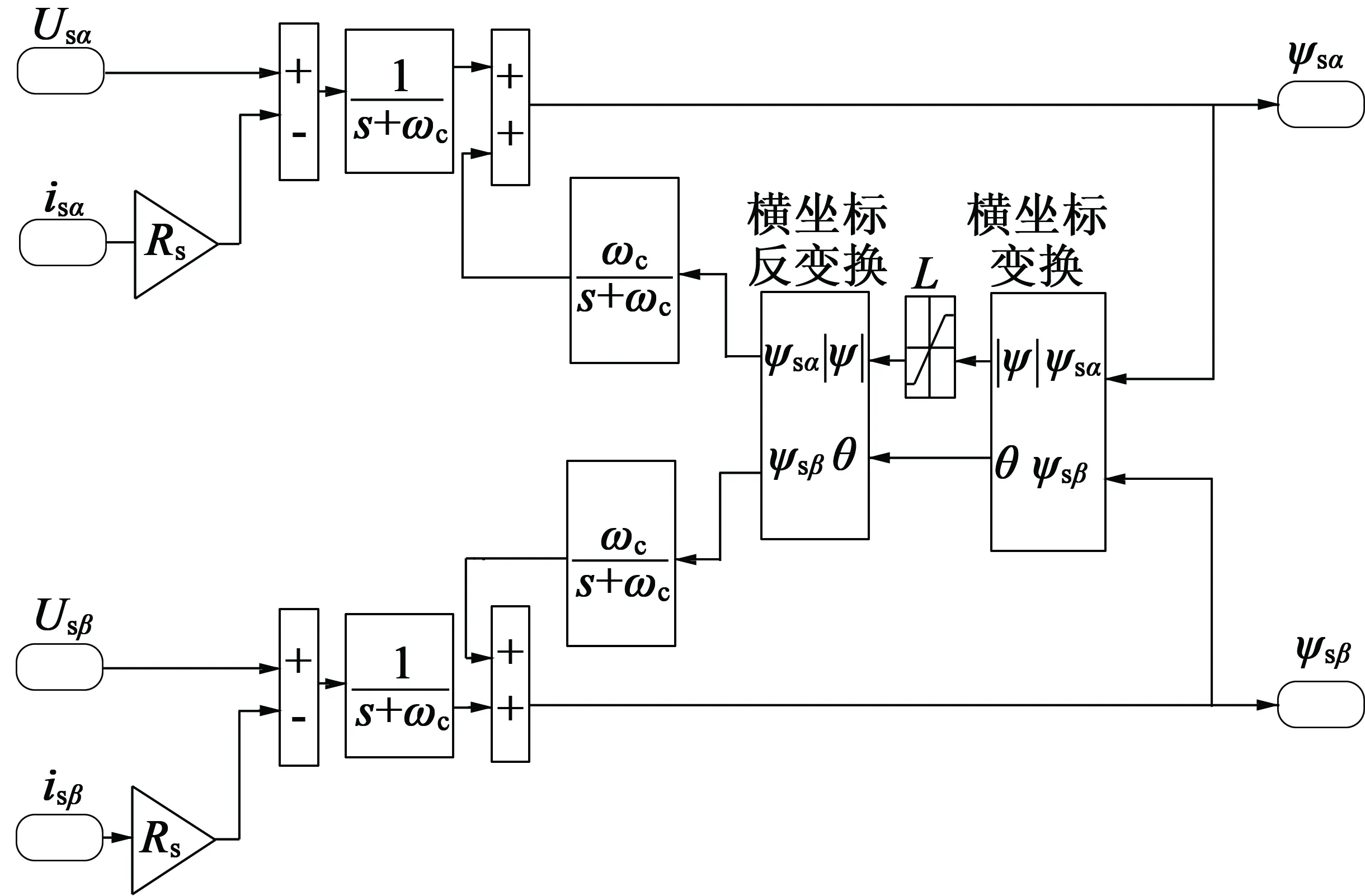
圖1 改進定子磁鏈觀測器結構圖
圖1中,定子磁鏈ψsα,ψsβ經低通濾波器輸出后,再利用極坐標變換將幅值和相位進行分離,幅值經過限幅器L,再進入極坐標反變換構成閉環幅值反饋,這樣就形成了一種帶幅值補償的定子磁鏈觀測器。在直接轉矩控制系統中,保持定子磁鏈幅值恒定可使電機穩定運行,因此限幅器的閾值L為給定磁鏈值。若限幅器輸入磁鏈幅值未超過限幅器閾值,則限幅器輸出磁鏈為期望的純積分效果,若輸入磁鏈幅值超過限幅器閾值,則輸出磁鏈為限幅器閾值。定子磁鏈相位經過兩次坐標變換未發生任何變化,避免了因積分飽和而導致正弦磁鏈信號發生畸變。
2 基于定子側的MRAS轉速估算方法
模型參考自適應理論廣泛應用于電機控制領域,是目前比較成熟的理論。模型參考自適應系統有三種參數辨識結構模型:串聯模型、并聯模型和串并聯模型,輸出并聯型的模型參考自適應方法在電機參數辨識方面應用最為廣泛[4]。傳統MRAS轉速估算方法中,參考模型為不含轉速的轉子磁鏈電壓方程,可調模型為含有待辨識轉速的轉子磁鏈電流方程,且兩模型須具有相同物理意義的輸入量,以轉子磁鏈作為比較輸出量構成廣義誤差,采用合適的自適應率來估算轉速[5]。傳統MRAS系統結構圖如圖2所示。
圖2 傳統MRAS系統結構圖
由于傳統MRAS轉速估算方法是在轉子側估算轉速,完全摒棄了直接轉矩控制的優點,增加系統的復雜性,本文提出完全利用定子側的變量來估算轉速,使用改進定子磁鏈觀測器構成無速度傳感器直接轉矩控制系統。在兩相靜止坐標系下,異步電機定、轉子磁鏈和電壓矢量方程為[6]:
(4)
由式(4)可得:
(5)
(6)
由式(4)與式(6)可得:
(7)

將定子磁鏈電壓表達式:
(8)
帶入式(7)得:
(9)
式(8)和式(9)構成了基于定子側的MRAS轉速估算方法的電機狀態方程,根據Popov超穩定性理論可推算出基于定子側的MRAS轉速估算公式:
(10)
3 仿真驗證
為了驗證上述方案的可行性,在MATLAB/Simulink中構建基于定子側的MRAS轉速估算方法模型,并進行仿真[5]。選用異步電機額定參數為:PN=15kW,UN=400V,fN=50Hz,Rs=0.2147Ω,Rr=0.220 5 Ω,Ls=Lr=0.065 2 H,Lm=0.064 2 H,p=2。

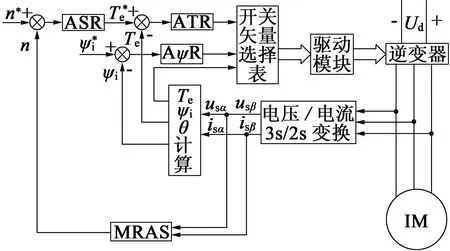
圖3 異步電機無速度傳感器直接轉矩控制結構圖
系統運行時,電機給定磁鏈1Wb,空載啟動,1.8 s時轉速由750 r/min突變為30 r/min,2.8 s時突加10 N·m負載,仿真波形如圖4所示。
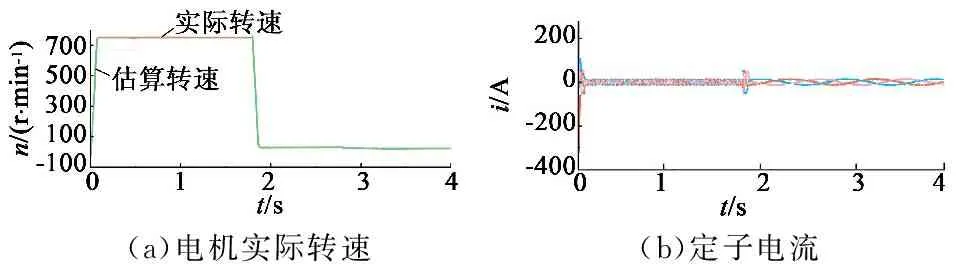
(a)電機實際轉速(b)定子電流
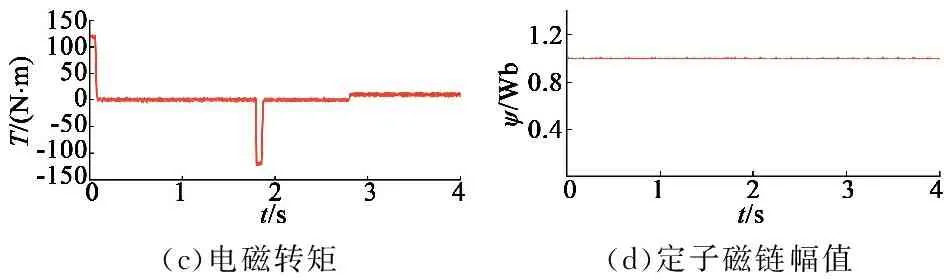
(c)電磁轉矩(d)定子磁鏈幅值
圖4 電機變負載、變轉速工況
由圖4可以看出,電機運行在高速和低速時,電機均能快速達到給定轉速,且估算轉速與實際轉速之間誤差較小,系統突加負載時仍能克服擾動,快速達到穩定狀態,從而驗證了上述方案的可行性。
4 實驗分析
為進一步驗證該轉速估算方法的可行性,選取型號為TMS320F28335的DSP作為整個電機調速系統的控制器,針對上述控制方案搭建實驗平臺并進行驗證實驗,來驗證該控制系統是否能確保電機按預期給定轉速可靠運行。實驗波形的測量使用示波器結合上位機觀測的方法,負載使用了一臺和異步電機同軸連接的直流電機和一臺電子負載。
圖5為電機實際轉速與反饋轉速的波形,是通過上位機所截得的局部波形圖,圖6為轉速為750 r/min時定子電流波形。由圖5電機實驗波形與圖4(a)仿真波形比較可以看出,電機實際運行情況與仿真情況基本相同。由于仿真是在理想情況下進行的,沒有考慮硬件電路本身所固有的誤差,進而可知電機實際運行的波形比仿真波形的脈動稍微大一些,而且轉速實驗波形響應時間相比仿真波形的響應時間而言,存在一定差異。
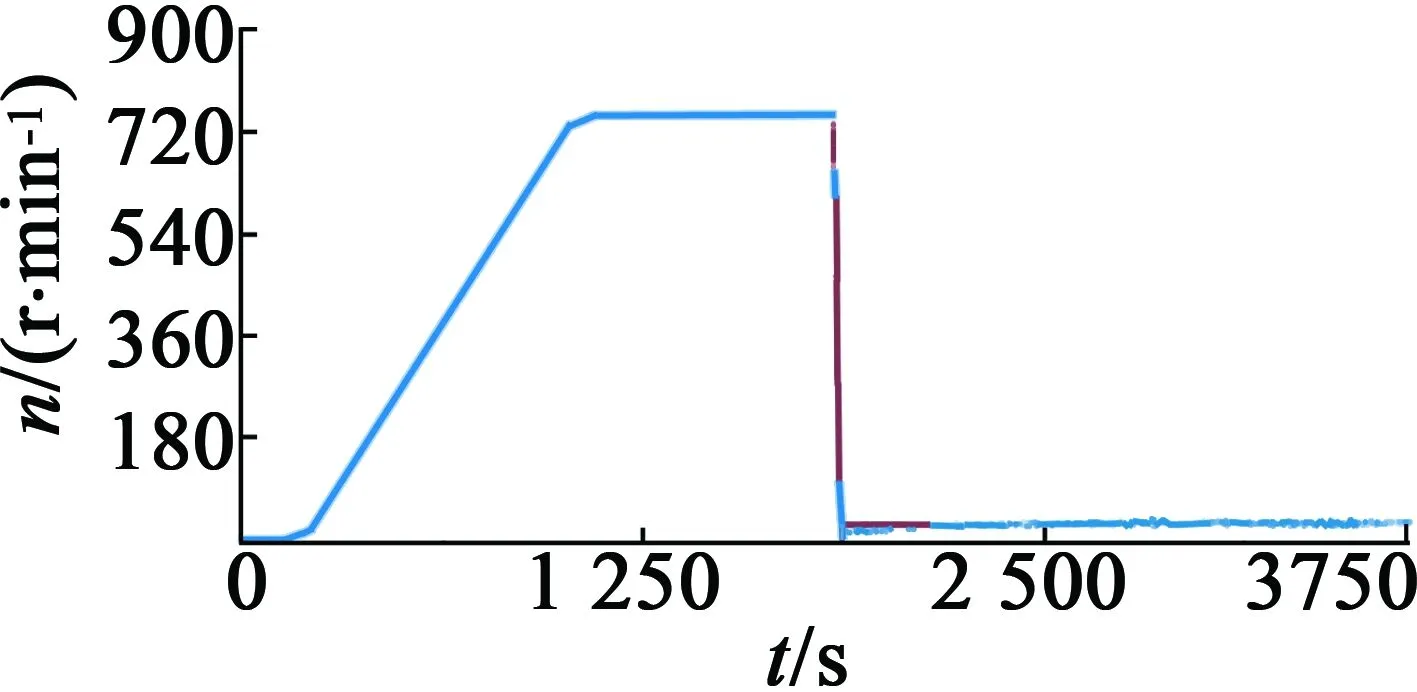
圖5 電機運行中實際轉速與反饋轉速
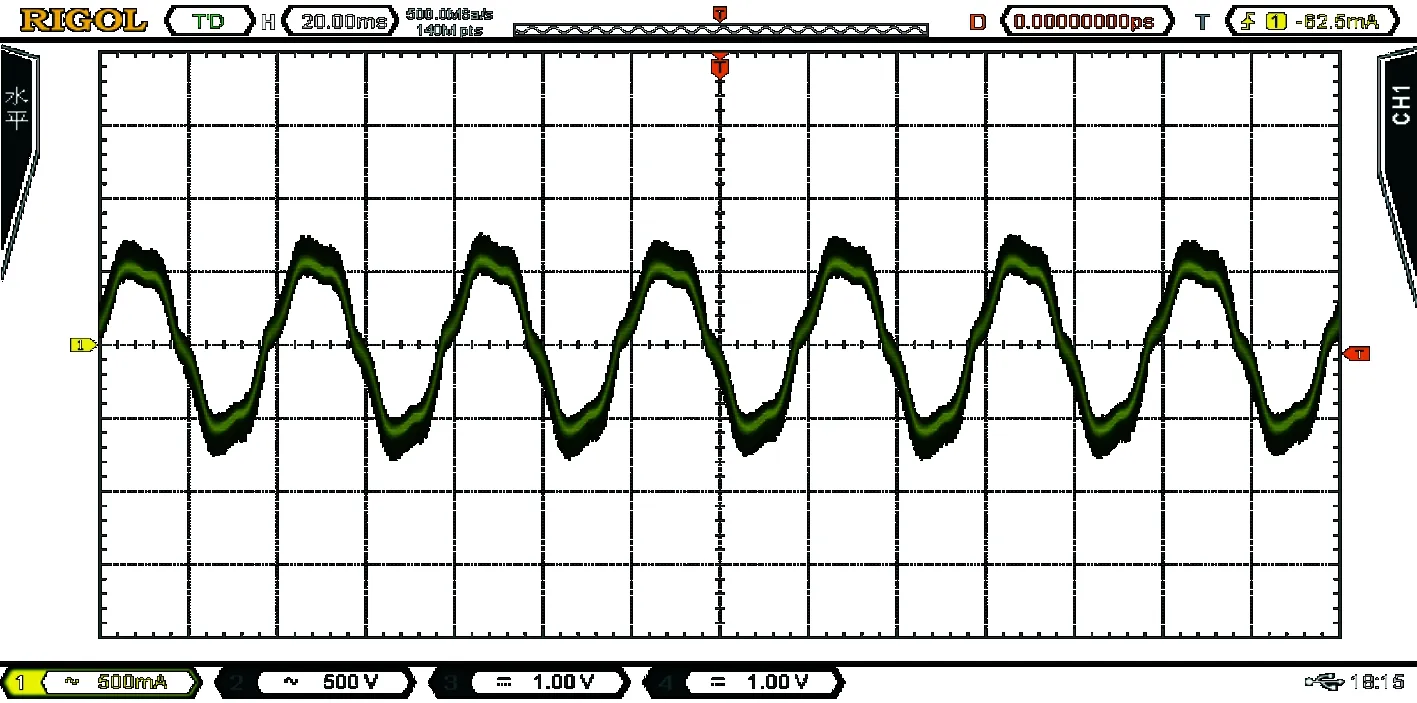
圖6 轉速為750 r/min時電流波形(截圖)
5 結 語
通過仿真分析與實驗驗證,證明了基于改進定子磁鏈觀測器的MRAS轉速估算方法不僅提高了定子磁鏈的觀測精度和轉速估算精度,而且也減少了系統的復雜度和誤差,證明了上述方案的可行性。
[1] 韋立祥,劉叢偉.一種消除電壓型磁鏈觀測器中直流偏置誤差的新方法[J].清華大學學報,2001,41(9):51-54.
[2] 李華德.交流調速控制系統[M].1版.北京:電子工業出版社,2003.
[3] 何志明.基于新型定子磁鏈觀測器的無傳感器直接轉矩控制系統研究[D].重慶:重慶大學,2009.
[4] 王奪,胡金高.基于Matlab的異步電機直接轉矩控制系統的仿真研究[J].機電工程技術,2006,35(1):47-50.
[5] 洪乃剛.電力電子、電機控制系統的建模和仿真[M].1版.北京:機械工業出版社,2010.
[6] BEIG A R,NARAYANAN G,RANGANATHAN V T.Modified SVPWM algorithm for three level VSI with synchronized and symmetrical waveforms[J].IEEE Transactions on Industrial Electronics,2007,54(1):486-494.
[7]RASHAGHF.DTC-SVMbasedonPItorqueandPIfluxcontrollerstoachievehighperformanceofinductionmotor[J].ResearchJournalofAppliedSciences,EngineeringandTechnology,2014,7(4):875-891.
A MRAS Speed Estimation Method Based on the Improved Stator Flux Observer
CAIWen-hao,SHANCheng-long,FANZhong-yang
(Xi'an University of Science and Technology,Xi'an 710054,China)
A rotator speed estimation method which used the stator's variables as state variables in stator coordinates was addressed. It reduced the complexity of system design and was totally independent of the rotator parameters. The improved LPF was utilized as stator flux observer. As a result, the DC bias error and initial values' error were greatly reduced. It was verified by the simulation system that the method had strong robustness, good speed estimation and high flux observe accuracy.
asynchronous motor; speed sensorless; direct torque control; low-pass filter; model reference adaptive system (MRAS)
2016-01-29
TM343
A
1004-7018(2016)07-0063-03
蔡文皓(1957-),男,教授,研究方向為電氣傳動、電力變換及可再生能源發電技術等。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19