基于模型切換策略的無刷直流電動機調速研究
2016-12-21 02:06:37陳鵬展
微特電機 2016年7期
陳鵬展,劉 曦
(華東交通大學,南昌 330013)
?
基于模型切換策略的無刷直流電動機調速研究
陳鵬展,劉 曦
(華東交通大學,南昌 330013)
提出了一類基于模型切換策略的無刷電機寬范圍調速方法,根據電機特性給電機速度目標值定義高/低速運行區間,當電機在低速區運行時,采用積分分離PID控制策略;電機在高速區運行,采用增量式PID控制策略,結合預先設定的速度過渡區,通過滯后切換實現控制模型轉換。實驗表明,提出的模型切換控制策略在低速和高速運行區域均能實現無刷直流電動機精確速度閉環控制,且模型間切換控制過程穩定,實現了無刷直流電動機的寬范圍調速。
無刷直流電動機;多模型控制;滯后切換;寬范圍調速
0 引 言
隨著無刷直流電動機(以下簡稱BLDCM)在工業自動化、汽車、家電領域的廣泛應用,BLDCM的控制策略已成為業內研究的熱點。各類應用場合對BLDCM的系統性能要求越來越高,單一模型的控制策略已無法滿足被控對象的穩定性、準確性、快速性要求。繼而,多模型控制策略受到廣泛的關注與研究[1-5]。傳統電機控制策略多為單一PID控制,面對現代復雜系統,此類控制策略已無法滿足業內需求。
多模型控制策略可根據對象參數的變化建立多個控制模型,通過改變控制策略,逼近復雜系統的動態特性,這樣使得系統整體性能滿足控制需求。
在電機調速過程中,系統參數會發生變化,為提高電機的控制性能,現將多模型控制策略應用于無刷直流電動機控制系統。本文將對基于多模型切換控制策略的BLDCM寬范圍調速進行研究。
1 模型切換控制原理
1.1 低速積分分離PID控制
針對電機特性,電機在低速啟動、運行時由于系統有慣性和滯后,超調量和調節時間都會較大。為使BLDCM閉環系統在低速時獲得最大低速調速范圍,需盡量減小超調量,避免由于電機在閉環PID調節中PWM輸出控制響應過慢而使電機停機。
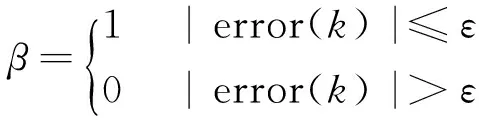
低速積分分離PID控制能減小超調量,有效增大低速調速范圍,積分分離PID控制算法如下[6]:
(1)
(2)
當|error(k)|>ε時,采用PD控制,避免產生過大超調,系統響應較快。
當error(k)|≤ε時,采用PID控制,以保證系統控制精度。
式中:T為采樣時間,β為積分開關系數。
1.2 高速增量式PID控制
由于增量式PID算法不需累加,控制增量僅與最近采樣點有關,誤動作時影響較小。在電動機處于高速運行區時,采用增量式PID控制,能有效保證BLDCM處于高速運行區的調速閉環響應。增量式PID控制算法如下[6],根據遞推原理可得:

(3)
則增量式PID控制算法:

(4)
Δu(k)=kp[error(k)-error(k-1)]+kierror(k)+
(5)
1.3 BLDCM多模型協同閉環系統
多模型切換控制[7]為多模型控制的主要控制策略。多模型切換控制的核心在于切換邏輯,切換邏輯的優劣決定著控制系統性能的好壞,主要切換邏輯有:狀態切換[8]、滯留時間切換[9]、滯后切換[10]。基于BLDCM控制系統的特性,將采用滯后切換方式實現電機低速/高速控制模型的切換。通過傳統BLDCM單一PID控制性能測試,結合控制系統反饋的性能指標,將電機轉速小于1 000 r/min定義為低速運行區域;電機轉速位于1 000 r/min至1 200 r/min之間定義為切換過渡區;電機轉速高于1 200 r/min 定義為高速運行區。
最初采用在低速和高速直接設定一個限定速度作為控制方式的切換點,但實驗測試點切換控制方式時,如果調速過快,電動機容易出現速度跳變、系統不穩定現象。考慮此點,本文為提高系統在控制方式切換時的穩定性,將在控制方式切換時設置過渡區進行滯后切換。模型切換控制策略示意圖如圖1所示。
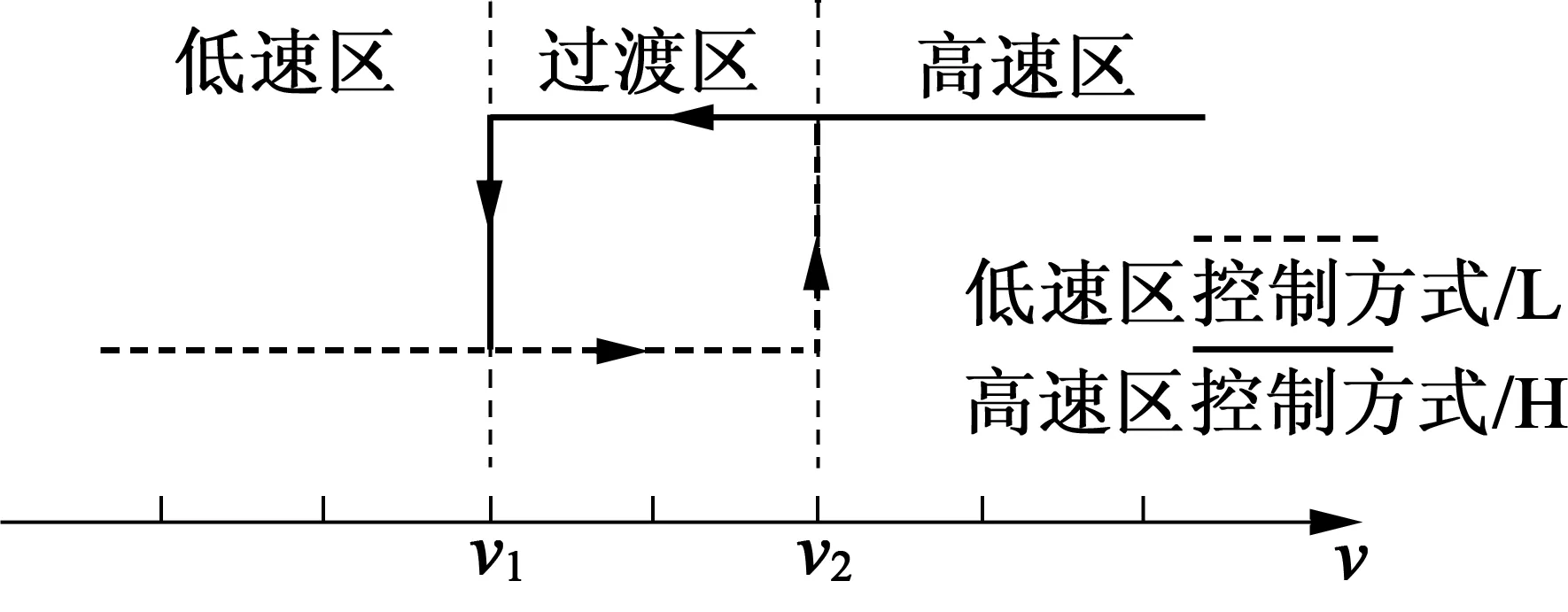
圖1 控制策略示意圖
根據圖1模型切換控制策略示意圖,當系統由低速控制方式切換至高速控制方式時,在過渡區采用低速控制方式;當系統由高速控制方式切換至低速控制方式時,在過渡區采用高速控制方式,在本控制系統中設定v1為1 000 r/min,v2為1 200 r/min。
根據BLDCM調速過程中不同轉速階段,將BLDCM調速過程分為低速運行區和高速運行區,分別建立相應控制模型,實現BLDCM多模型切換控制[11]。低速運行區域,應用積分分離PID控制策略;高速運行區域,應用增量式PID控制策略。則BLDCM模型切換控制系統框圖如圖2所示。
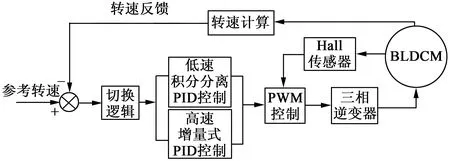
圖2 BLDCM模型切換控制系統框圖
2 模型切換策略平臺構建
實驗平臺采用STM32F103RBT6作為控制系統主芯片,MOSFET驅動電路采用N+N結構,以IR2101作為MOSFET驅動芯片。以42BLF02 BLDCM作為被控對象。電子換向采用“二相導通星形三相六狀態”方式[12]。BLDCM控制系統等效框圖如圖3所示。

圖3 BLDCM控制系統等效框圖
圖4為實驗平臺,直流穩壓電源為BLDCM驅動板提供24 V直流電壓,上位機通過JTAG仿真器與BLDCM驅動板實現通信,BLDCM驅動板在霍爾傳感器的基礎上實現對電機的驅動與電機轉速的計算, FT232RL將電機轉速實時傳遞給上位機,上位機在LabVIEW中對電機轉速進行實時監控。通過轉速表測量電機轉速,對比監控數據,校驗上位機數據的準確性。
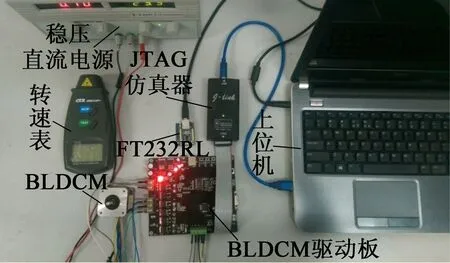
圖4 實驗平臺
3 BLDCM控制性能測試
針對本實驗平臺,電動機閉環速度最低250 r/min,最高轉速4 200 r/min。為了驗證本文中基于多模型滯后切換BLDCM控制系統的性能,在實驗平臺上調速測試。實驗過程中的數據采樣周期為15 ms。
圖5、圖6為控制系統在80 Hz斜坡信號下多模型滯后切換控制。圖5為電機在80 Hz頻率斜坡信號下,BLDCM控制系統通過滯后切換實現低速區至高速區切換;圖6為電機在80 Hz頻率斜坡信號下BLDCM控制系統通過滯后切換實現高速區至低速區切換。系統穩定、無抖動。
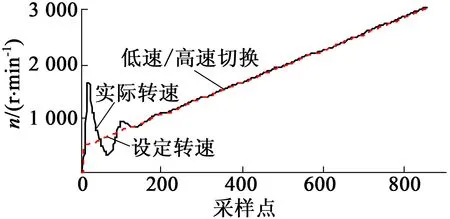
圖5 滯后切換80 Hz斜坡信號控制系統測試 (低速切換至高速)
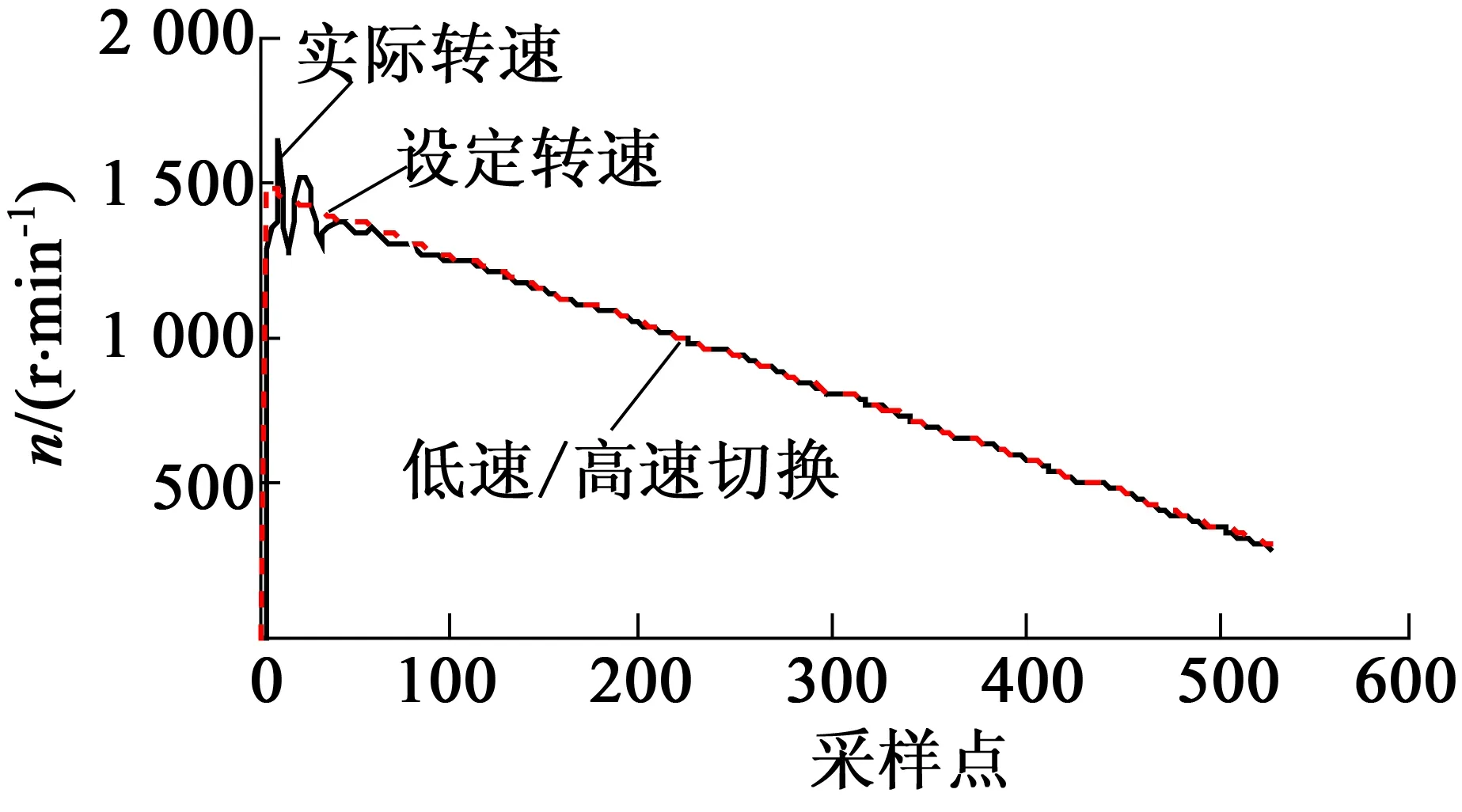
圖6 滯后切換80 Hz斜坡信號控制系統測試 (高速切換至低速)
圖7為多模型點切換控制電機頻率響應。由圖可見,控制系統執行點切換時,系統出現抖動、電機速度跳變、系統不穩定的現象,表明本文提出的多模型切換控制策略的有效性。
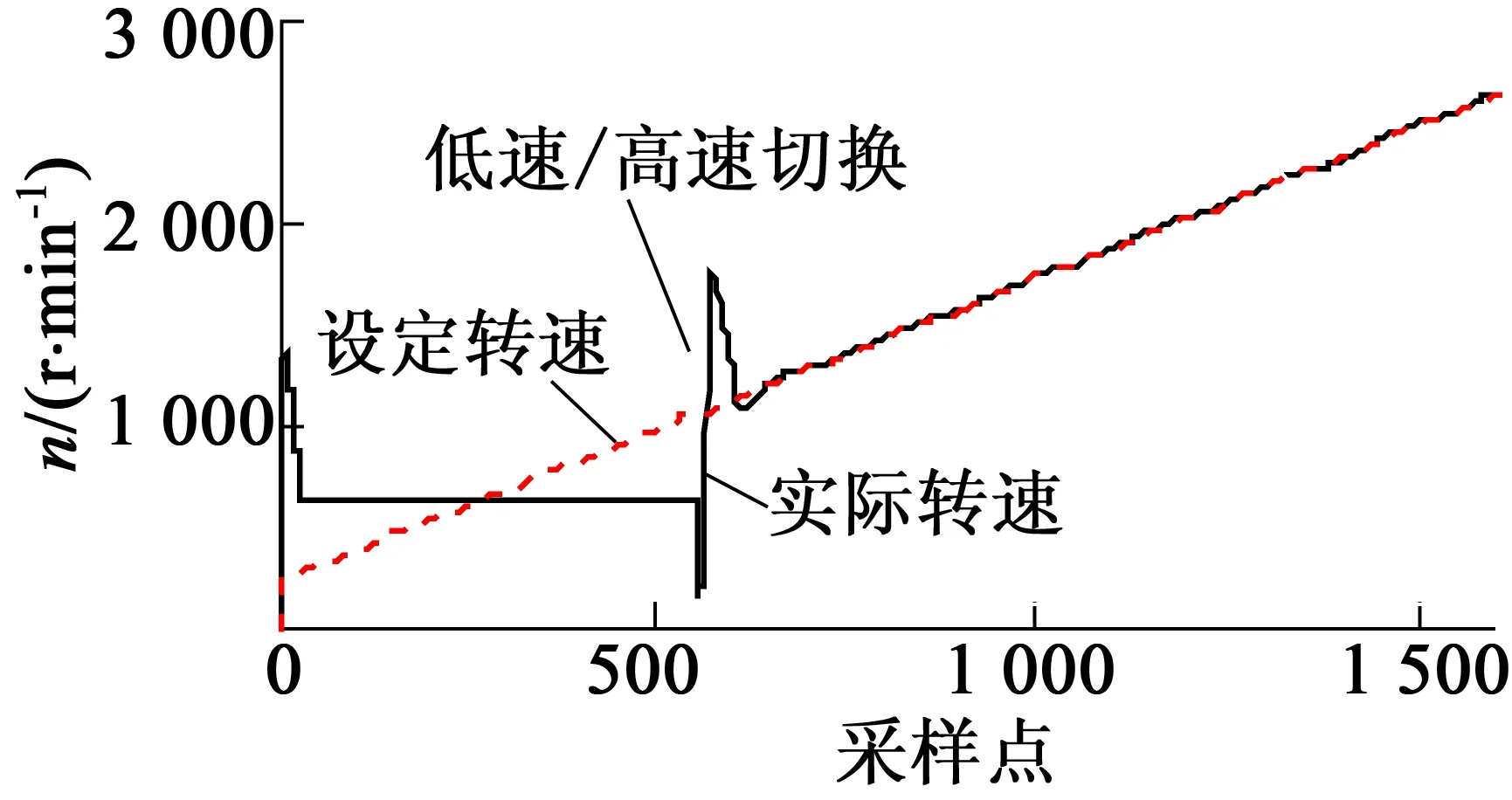
圖7 點切換80 Hz斜坡信號控制系統測試
圖8 為BLDCM控制系統低速外界擾動測試。由測試結果可見,在外界擾動情況下系統能快速通過閉環系統調節,回歸穩態設定速度;在外界擾動消失后,閉環系統能快速回歸穩態設定速度。表明本文提出的多模型協同控制系統在低速運行時具有良好的抗外界擾動性能。
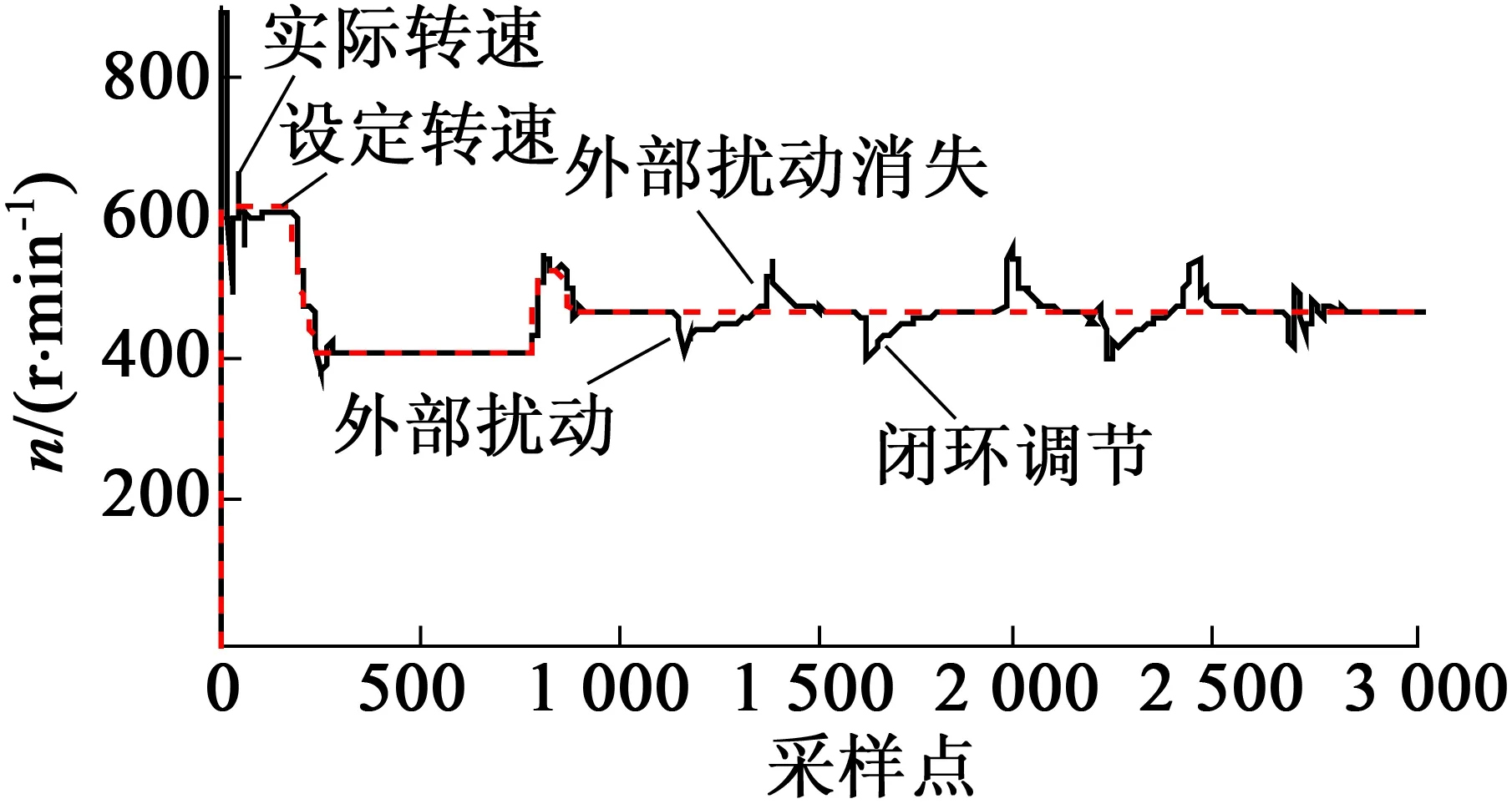
圖8 BLDCM控制系統低速外界擾動測試
圖9為圖8所示低速外界擾動誤差曲線,如圖所示,控制系統對低速運行時外界擾動調節性能良好,最大超調量在20%以下。
圖10為BLDCM控制系統高速外界擾動測試。由測試結果可見,在外界擾動情況下系統能快速通過閉環系統調節,回歸穩態設定速度;在外界擾動消失后,閉環系統能快速回歸穩態設定速度。表明本文提出的多模型協同控制系統在高速運行時具有良好的抗外界擾動性能。
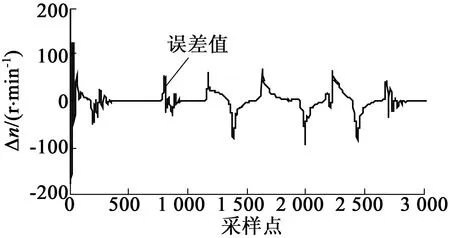
圖9 低速擾動誤差曲線
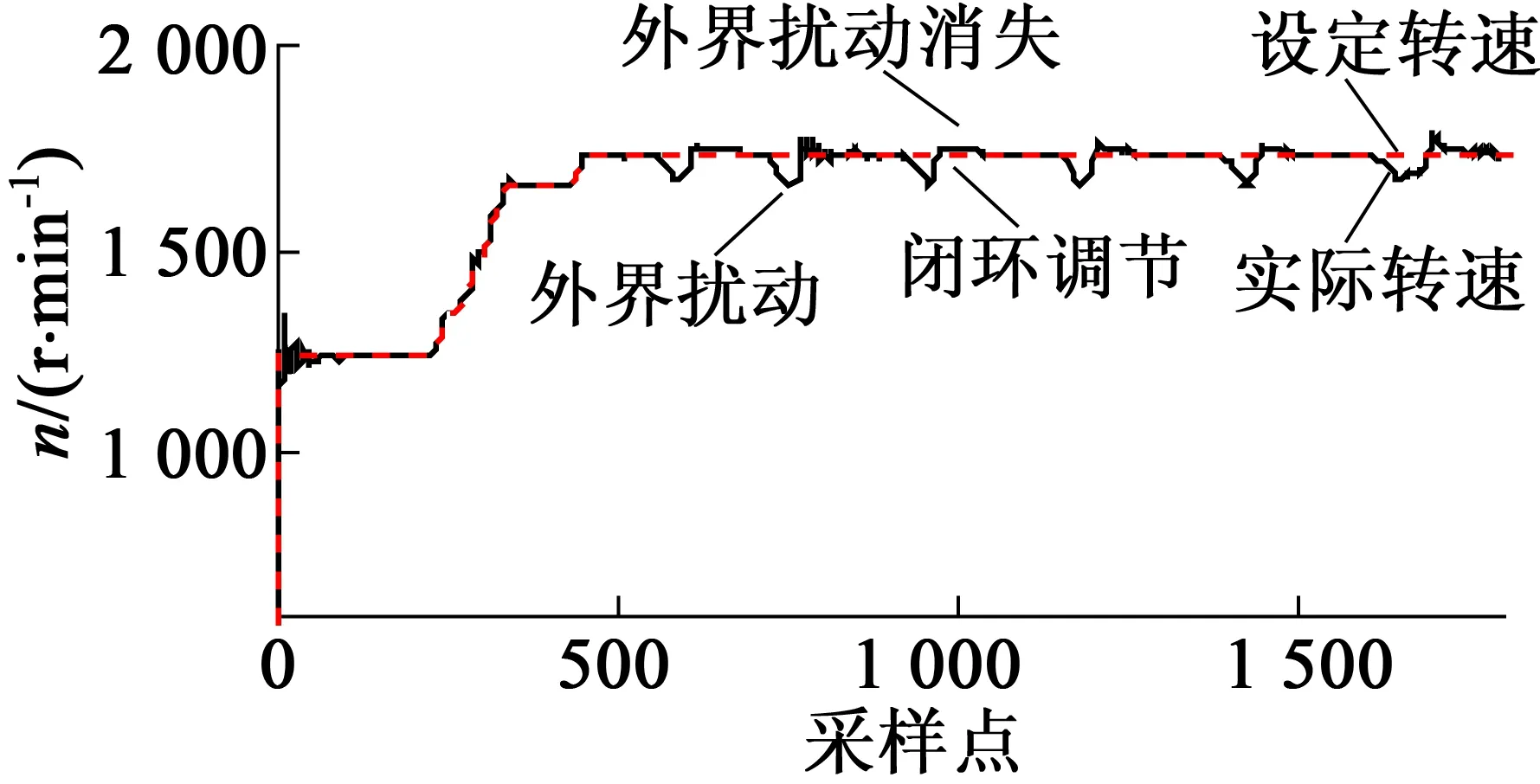
圖10 BLDCM控制系統高速外界擾動測試
圖11為圖10所示高速外界擾動誤差曲線,如圖所示,控制系統對高速運行時外界擾動調節性能良好,最大超調量在15%以下。
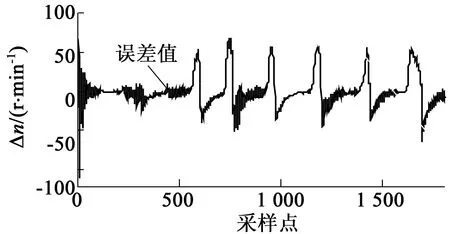
圖11 高速擾動誤差曲線
圖12為高速啟動電機轉速響應曲線,在實驗中,設置1 600 r/min高速啟動,曲線表明, 45個采樣點系統達到穩態,調整時間為0.675 s。說明本BLDCM控制系統具有良好的高速啟動特性。
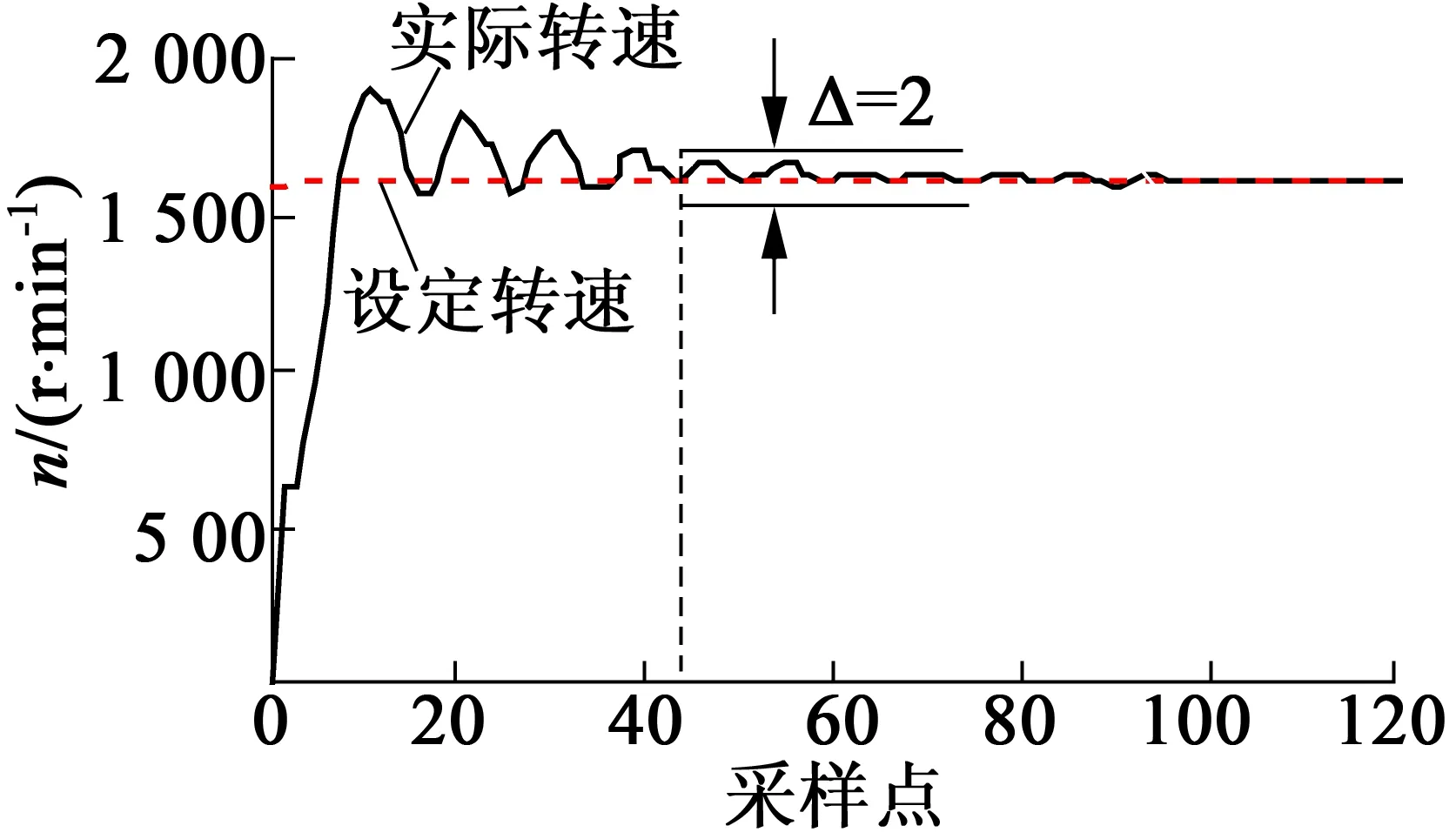
圖12 高速啟動特性
圖13為低速啟動電機轉速響應曲線,在實驗中,設置500 r/min低速啟動,實驗數據表明, 80個采樣點后達到穩態,調整時間為1.2 s。說明本BLDCM控制系統具有良好的低速啟動特性。
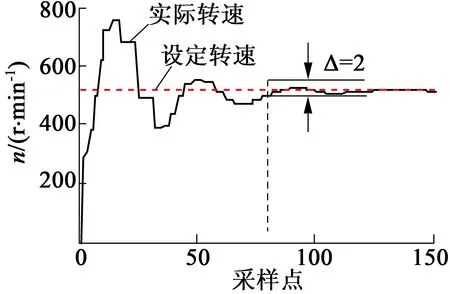
圖13 低速啟動特性
4 結 語
本文在傳統BLDCM調速控制系統的基礎上,提出多模型切換控制策略,實現了BLDCM寬范圍調速。根據實驗結果,可得出以下結論:
(1)文中提出BLDCM低速/高速分區調速控制,通過滯后切換邏輯實現低速/高速控制策略柔性轉換,避免了常見多模型切換控制過程中出現的控制系統抖動、崩潰等現象。
(2)本文提出的BLDCM控制系統在低速運行、高速運行過程中,均具有良好的抗擾動性能,證明了多模型控制策略的穩定性。
(3)文中提出的多模型控制策略,可保證BLDCM控制系統的整個速度運行區間內均能保持良好的準確性,實現電機寬范圍閉環控制。
[1]AADERSONBDO,DEHGHANIA.Challengesofadaptivecontrol-past,permanentandfuture[J].AnnualReviewsinControl,2008,32(2):123-135.
[2]NARENDRAKS,HANZ.Thechangingfaceofadaptivecontrol[J].AnnualReviewinControl,2011,35(1):1-12.
[3] 胡國龍, 孫優賢. 多模型控制方法的研究進展及其應用現狀[J].信息與控制,2004, 33(1):72-76.
[4] 李曉理,王偉,孫維.多模型自適應控制[J].控制與決策,2000,15(4):390-394.
[5] 劉琳琳.多層次多模型預測控制算法的模型切換方法研究[J].自動化學報,2013,39(5):626-630.
[6] 潘新民.微型計算機控制技術[M].北京:高等教育出版社,2001.
[7] 陳杰,陳偉,孫健.多模型自適應控制研究概述[J].系統科學與數學,2014,34(12):1421-1437.
[8]PERSISCD,SANSISRD,MORSEAS.Supervisorycontrolwithstate-dependentdwell-timelogicandconstraints[J].Auotmatica,2004,40(2):269-275.
[9]CAOM,MORSEAS.Dwell-timeswitching[J].System&ControlLetters, 2010,59(1): 57-65.
[10]HESPANHAJP.Logical-BasedSwitchingAlgorithmsinControl[D].NewHaven:YaleUniversity,1998.
[11] 王世虎,沈炯,李益國.多模型控制方法及其研究進展[J].工業儀表與自動化裝置,2008:13-17.
[12] 葉金虎,徐思海,張明頡,等.無刷直流電動機[M].北京:科學出版社,1982.
Research on Speed Control of Brushless DC Motor Based on Model Switching Strategy
CHENPeng-zhan,LIUXi
(East China Jiaotong University,Nanchang 330013,China)
A wide range speed adjustment method of brushless DC motor based on model switching strategy was proposed. According to the motor characteristics the high/low speed operating range was defined for a target value of motor speed, using integral separation PID control strategy when the motor running in low speed region and using the incremental PID control strategy when the motor in high speed. Combined with the preset speed transition region, t he control model was transformed by hysteresis switching. Experimental results show that the proposed model switching control strategy in the region of the low-speed and high-speed operation can achieve precise speed closed-loop control of brushless DC motor, wide speed range, and stable model switching.
brushless DC motor; multi-model coordinated control; hysteresis switching;wide speed control
2015-10-02
國家自然科學基金項目(61164011);江西省自然科學基金項目(20114BAB201023);江西省研究生創新專項基金項目(YC2014-X006);江西省博士后科研擇優項目
TM33
A
1004-7018(2016)07-0056-03
陳鵬展(1975-),男,博士,副教授,研究方向為智能化自動化裝置及汽車電子控制、現場總線控制及網絡控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45