
基于硬件在環的車身電子穩定系統自動化測試研究與應用
2016-12-22 03:16:00王愛春吳方義劉衛東劉貴濤燕冬彭晨若萬麗琴
汽車電器 2016年11期
王愛春,吳方義,劉衛東,劉貴濤,燕冬,彭晨若,萬麗琴
(江鈴汽車股份有限公司,江西南昌 330001)
基于硬件在環的車身電子穩定系統自動化測試研究與應用
王愛春,吳方義,劉衛東,劉貴濤,燕冬,彭晨若,萬麗琴
(江鈴汽車股份有限公司,江西南昌 330001)
介紹ESP(車身電子穩定系統)硬件在環自動化測試系統的搭建和應用,基于Matlab/Simulink建立了ESP仿真模型,利用dSPACE的上位機軟件和板卡搭建了ESP硬件在環測試平臺,實現了系統的開、閉環調試,并以1條測試用例為例,詳細介紹自動化測試流程和ESP HIL(硬件在環)測試的應用。測試結果表明:該系統符合開發測試的要求,為ESP的快速開發測試提供了一條有效途徑。
硬件在環;車身電子穩定系統;自動化測試
汽車車身電子穩定控制系統是車輛新型的主動安全系統。近年來,市場對汽車安全性能要求不斷提高,促使各整車企業加強了對ESP(車身電子穩定系統)的開發和測試。HIL測試作為一種新型的開發測試手段,其精度高,且能夠實現自動化測試的優點,對產品性能和品質的提高具有極大的促進作用。目前,HIL測試在國外ESP的開發測試中應用比較廣。在國內,HIL測試主要應用在BCM(車身控制模塊)的開發測試中[1-2],技術已經相對比較成熟,因為BCM的測試不涉及到復雜的仿真模型;在ESP的開發測試中還鮮有應用,只有少數整車企業和大學開展了一些關于ESP硬件在環測試平臺搭建的研究[3-6]。本文將基于HIL測試在一款研發車型ESP開發測試中的應用,介紹ESP的虛擬仿真模型建模和仿真平臺搭建及其自動化測試應用。
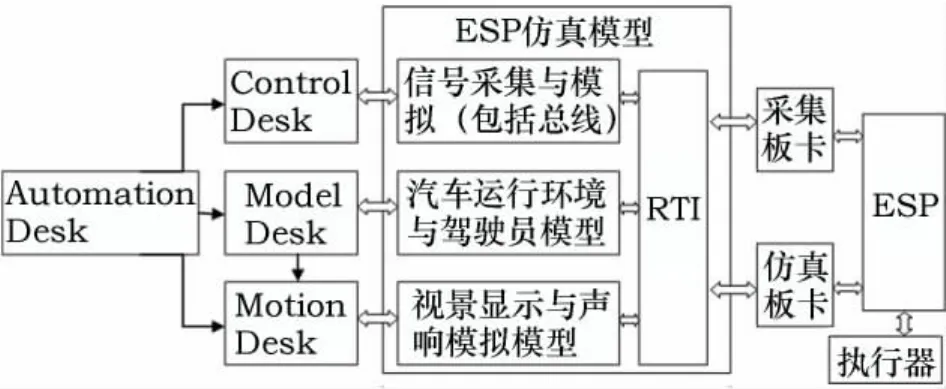
圖1 ESP HIL自動化測試系統結構圖
1 ESP硬件在環自動化測試系統介紹
如圖1所示,ESP硬件在環自動化測試系統由上位機、ESP仿真模型和機柜3個部分組成。上位機是由dSPACE公司開發的軟件平臺組成;ESP仿真模型是整個測試系統的核心部分,為ESP的正常工作提供虛擬實車環境;機柜主要包括仿真與采集板卡、真實ESP控制器、電源和執行器。汽車ESP硬件在環自動化測試系統的設計思想是:把真實的控制器放置在一個虛擬整車的環境中,通過實時仿真接口RTI和I/O板卡、通信板卡和傳感器仿真板卡,與運行在4核處理器板卡DS1006中的車輛動力學模型連接在一起,再輔助以各種上位機軟件,構成一個完整的硬件在環自動化測試系統,實現“人-車-環境”的閉環仿真[7]。
2 ESP硬件在環自動化測試系統搭建
2.1 ESP虛擬仿真模型建模
HIL仿真是一種半實物仿真,但與傳統的半實物仿真控制器為虛擬模型不一樣,硬件在環的虛擬部分為整車,實物為控制器,是一種針對真實控制器的半實物仿真。所以進行ESP虛擬仿真建模,就是要建立起ESP的虛擬運行環境,對其運行環境與輸入的各參數條件進行建模仿真,構建ESP的虛擬運行環境。圖2為虛擬整車仿真模型原理結構圖,主要包括5個部分:虛擬ECU(電子控制單元)、發動機模型、傳動系統模型、整車動力學模型和駕駛環境。無論是多個ECU系統級的測試,還是單個ECU單節點的測試,都必須嚴格按照圖2所示的結構來構建仿真模型,這樣才能保證結構的統一性和條理性,同時方便模型的集成和拆分。
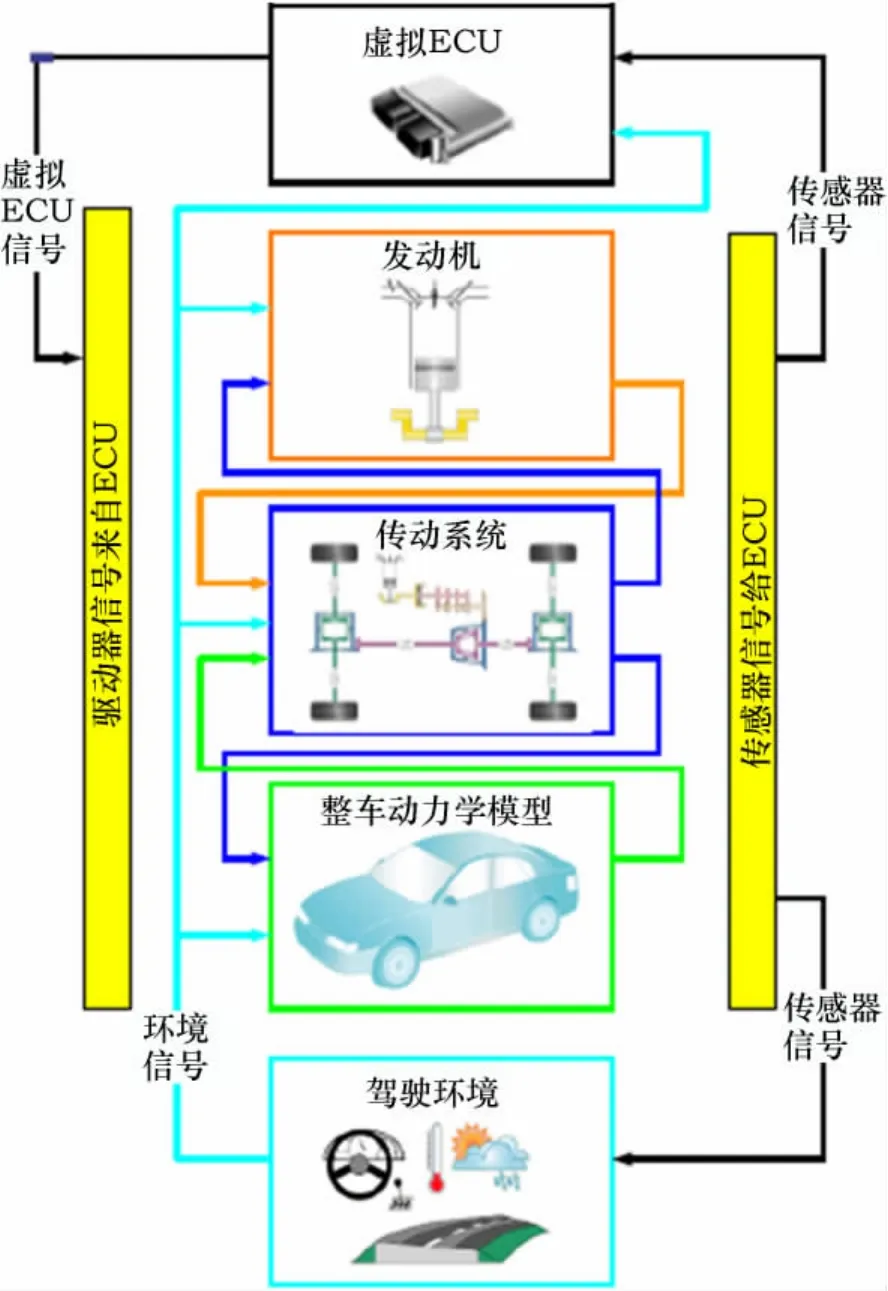
圖2 虛擬整車仿真模型原理結構圖
具體到ESP的建模,典型的汽車電子穩定控制系統主要由傳感器、ECU和執行器三大部分組成。傳感器需要模型和板卡的仿真,而且是仿真的關鍵信號,直接影響到測試結果的準確性,主要包括4個輪速傳感器、轉向盤轉角傳感器、側向加速度傳感器、橫擺角速度傳感器、制動主缸壓力傳感器等。執行器部分采用真實件,包括液壓回路的電磁閥和制動卡鉗,但需要對執行器的動作進行回采,形成閉環控制。ECU是真實件,主要作用是監控汽車運行狀態,與EMS(發動機管理系統)聯動,可對發動機動力輸出及制動系統進行干預和調整[8]。除此之外,該系統正常工作還涉及到一些關鍵輸入信號和駕駛環境的模擬,比如啟動信號的輸入、制動踏板和油門信號的輸入、車輛動力學的模擬、輪胎模擬、道路仿真和車輛駕駛仿真等。
按照信號類型的分類,構建的ESP HIL仿真模型如圖3所示。本系統使用Matlab/simulink進行模型搭建,主要包括ESP_MDL模塊和ESP_IO模塊。ESP_MDL包括了計算轉矩、制動系統、輪胎模型、懸架、六自由度整車、道路、操控和駕駛員的模型。在ESP_MDL中還有比較特殊的一部分就是虛擬ECU,在ESP單個控制器的虛擬仿真模型中,沒有真實的EMS和TCU(自動變速器控制單元)。但是ESP的正常工作與EMS和TCU有著密切的聯系,所以在ESP的虛擬仿真模型中需要將EMS和TCU配置成虛擬ECU,將所有需要的信號通過總線仿真的形式輸入給ESP的模型。ESP_IO包括了仿真輪速、橫擺角傳感器、采集12路電磁閥信號、采集2個卡鉗力的信號和殘余總線仿真。

圖3 ESP HIL測試仿真模型
2.2 ESP測試系統機柜搭建
首先統計ESP所有的輸入輸出信號,并將信號按照類型進行分類,計算出所需要的I/O板卡、通信板卡和傳感器仿真板卡種類和數量,然后就可以進行機柜的布局和搭建。
該款車型所選用ESP為46個引腳,經過統計分配,本測試機柜用了5塊I/O板卡、4塊CAN卡、7塊FIU板卡、10塊轉接板卡、5塊傳感器仿真專用板卡等共計40塊板卡。如圖4所示,整個機柜包括電源開關部分、程控電源部分、FIU板卡部分、BOB部分、執行器部分、處理器部分以及輸入輸出連接頭等部分。該機柜滿足ESP的測試需求,并有足夠的冗余,為ESP的升級換代所用。
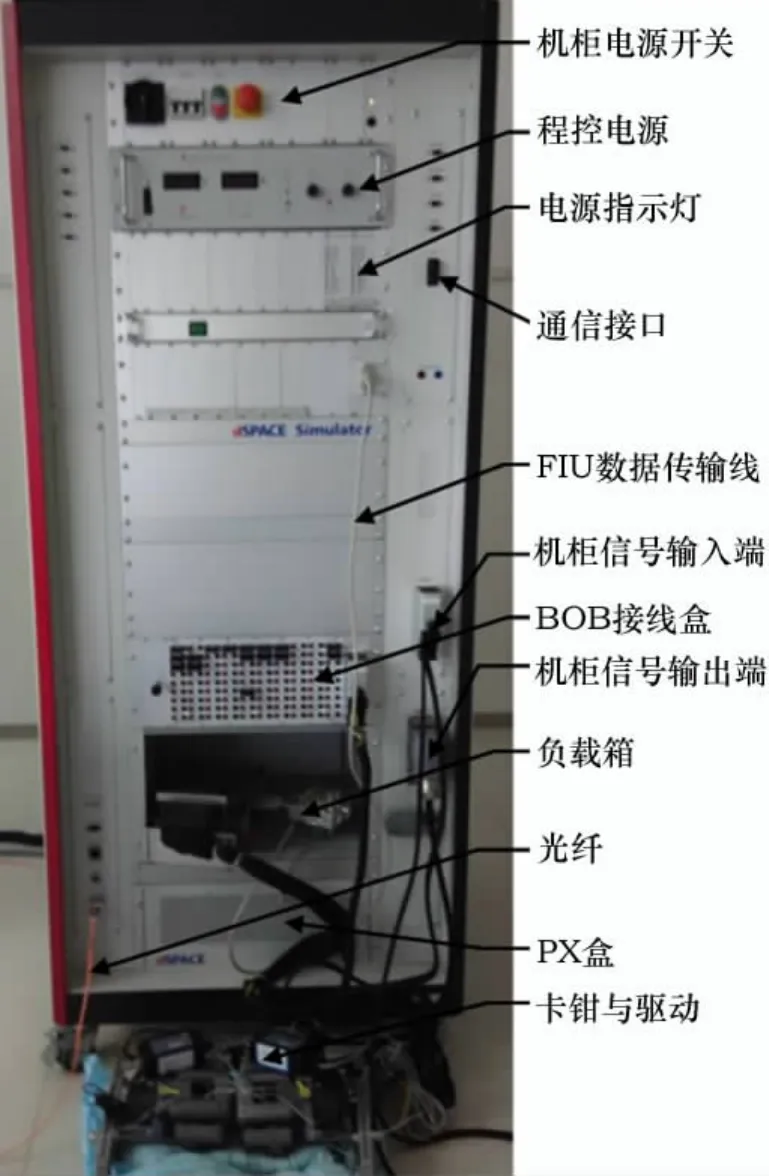
圖4 ESP HIL測試機柜
2.3 ESP測試系統上位機組成
上位機是由德國dSPACE公司開發的幾款商業軟件。
1)Control Desk基于模板,按項目測試需求添、減控件,進行模型信號與控件的關聯,搭建控制界面,如圖5所示。

圖5 ControlDesk監控界面
2)Automation Desk圖形化的編程語言,可以直接拖拽,使用簡單方便。
3)Model Desk對ESP的運行環境進行配置,包括路面和駕駛方式,如圖6所示。
4)Motion Desk直觀地監控車輛運行狀態參數和環境,如圖7所示。
需要注意的是,所有軟件必須加載Matlab/Simulink編譯模型生成的同一.sdf文件。
圖6 ModelDesk車輛駕駛和路面配置

圖7 MotionDesk圖像化監控界面
2.4 測試系統調試
整個硬件在環自動化測試系統搭建完成后,需要對該系統進行調試,主要目的是為了對系統進行聯調,保證測試的準確性,不會因為測試設備的問題而引起測試錯誤。調試主要包括激勵、開環和閉環測試,激勵測試只需要確認機柜通道為導通且無串線即可,開環測試需要輸出隨著輸入的變化而變化,閉環測試是在開環的基礎上加入模型控制,是最精確的調試,閉環調試通過后,就可以進行ESP的開發與自動化測試工作。
3 ESP硬件在環自動化測試應用
3.1 自動化測試流程
整個平臺搭建調試好后,就可以進行ESP的手動測試工作,但HIL測試優勢在于可以進行自動化測試,節省大量的測試執行時間,使開發者把主要工作放在精細模型、優化測試用例和結果分析上面。自動化測試的流程如圖8所示,首先根據測試需求編寫測試用例,然后根據測試用例搭建測試序列,序列搭建好后就可以執行自動化測試,最后是結果分析與報告管理。下面將以ESP的HIL自動化測試為例,完整介紹整個自動化測試流程。

圖8 自動化測試流程
3.2 ESP自動化測試應用
1)測試需求測試3個ECU能否正確在低附著路面制動停車。
2)測試用例描述使車輛駛入目標道路:直線路面,長度5km,寬3.5m,附著系數為0.3;操作加速踏板獲得60 km/h穩定車速;松開加速踏板;開始采集;制動踏板在時間0.1 s內踩到60%,使車輛停在目標道路上,該過程中轉向盤保持不動。
3)轉化為流程圖流程圖的好處就是將測試用例中語言的描敘圖形化,可以方便序列的搭建。流程圖如圖9所示。
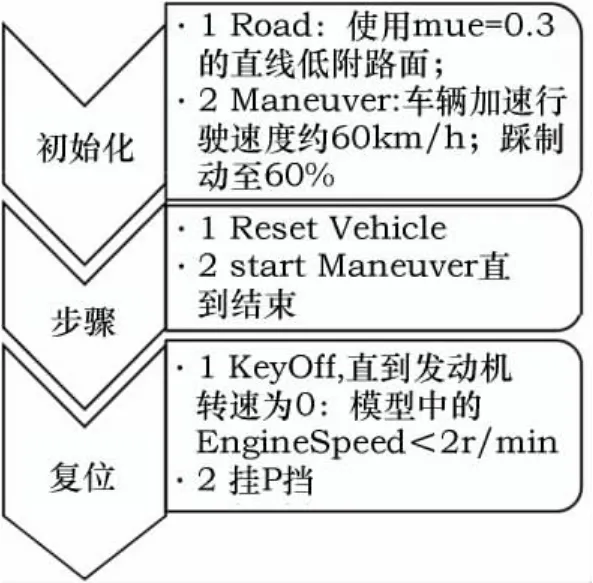
圖9 流程圖
4)建數據字典對有用的變量進行整理,方便調用。
5)建基本動作庫對一些基本操作(如:上下電、踩油門、踩制動踏板等)進行建庫,方便測試序列的搭建。
6)測試序列有了數據字典和基本動作庫后,建序列就是從建好的數據字典和基本動作庫里面拖拽庫或變量,簡單方便。如圖10所示。
7)Python語言編寫評價判斷Automation Desk提供了多種評價方式,簡單的評價可以通過寫Python語言實現,復雜的評價可以通過構造參考曲線來實現,本條測試用例就是利用構造參考曲線來進行評價判斷結果是否正確,如圖11和圖12中的參考曲線。
8)測試執行可以逐條執行測試序列,也可以批量執行。
9)測試結果分析自動生成測試結果和詳細報告,并對重要的變量曲線進行繪圖,幫助分析。由圖11和圖12可得出,在整個制動過程中,輪速是波動減小,反應出卡鉗時松時緊,進而不會讓車輪抱死。根據制動曲線,還能得出最優制動曲線對應的制動參數,幫助ESP的開發。
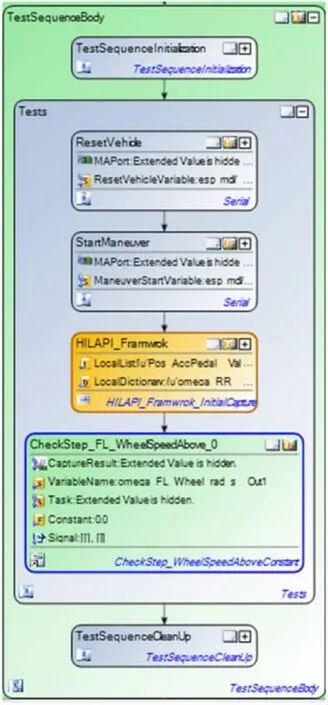
圖10 測試序列
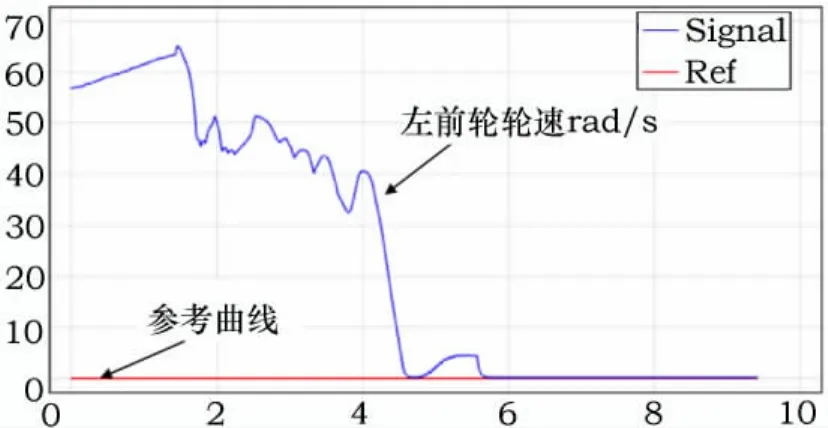
圖11 輪速與參考曲線的比較圖
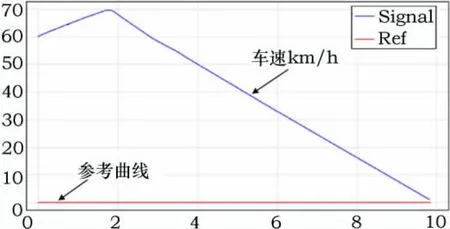
圖12 車速與參考曲線的比較圖
4 總結
HIL自動化測試系統可用于整車開發中各控制模塊功能測試、通信測試、故障診斷測試及預標定測試。在產品開發早期進行驗證測試,模擬各種復雜、極限工況,提前發現設計問題進行整改。本文介紹了一款在研發車型ESP硬件在環自動化測試系統的搭建和應用,并以1條測試用例為例,詳細介紹了自動化測試流程和ESP HIL自動化測試的應用。通過在實際項目中的應用,進一步體現了HIL測試的優勢,說明了ESP硬件在環自動化測試平臺可以保障人員的安全,縮短ESP的研發周期,降低開發成本,是快速開發ESP的有效途徑。
[1]焦合美,孫華鋒,徐蘭欣,等.車身硬件在環系統建設淺談[J].汽車電器,2015(4):56-58.
[2]劉衛東,王愛春,吳方義,等.車身控制模塊硬件在環測試系統搭建及測試應用[J].汽車電器,2015(12):50-53.
[3]劉巍,趙向東,李幼德,等.ESP硬件在環試驗平臺的研究與開發[J].汽車工程,2007,29(9):809-811.
[4]高明,趙楠,張榮蕓,等.基于LabVIEW的ESP硬件在環仿真實驗臺開發及仿真研究[J].汽車零部件,2013(6):53-56.
[5]林波,夏群生,何樂,等.ABS液壓混合仿真試驗臺的研究和應用[J].清華大學學報(自然科學版),2002,42(2):262-265.
[6]王玉偉.基于DSPACE的ESP硬件在環仿真實驗臺的開發[D].吉林:吉林大學,2011.
[7]丁海濤,郭孔輝,張建偉,等.汽車ESP硬件與駕駛員在回路仿真試驗臺的開發與應用[J].汽車工程,2006(4):346-350.
[8]陳天殷.車輛電子穩定程序控制系統ESP[J].汽車電器,2015(2):15-18.
(編輯 陳程)
The Research and Application of ESP Automatic Testing based Hardware-In-The-Loop Simulation Technique
WANG Ai-chun,WU Fang-yi,LIU Wei-dong,LIU Gui-tao,YAN Dong,PENG Chen-ruo,WAN Li-qin
(Jiangling Motors Co.,Ltd.,Nanchang 330001,China)
This article introduces the establish and application of ESP Hardware-In-The-Loop(HIL)automatic testing system.ESP simulation model is built based on Matlab/Simulink,and the ESP HIL test platform is set up using host computer and software board of dSPACE,which realizes the open and closed loop testing.A test case example is given to introduce automatic testing process and ESP HIL testing applications.The test result shows that the system meets development requirements,and provides an effective method for ESP quick development testing.
Hardware-In-The-Loop;electronic stability program;automatic testing
U463.61
A
1003-8639(2016)11-0059-04
2016-02-24;
2016-07-20
王愛春(1976-),女,首席工程師,主要從事汽車電子電器產品開發工作;吳方義(1985-),男,工程師,主要從事汽車電控單元開發與自動化測試工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
