基于XBW技術的汽車無油化制動系統(tǒng)設計
2016-12-22 17:45:44靳華偉王傳禮張新
安徽理工大學學報·自然科學版 2016年2期
靳華偉 王傳禮 張新


摘要:針對傳統(tǒng)液壓制動系統(tǒng)笨重、耗能大等缺點,通過XBW(線控)技術對其進行改進。采用理論分析、建模仿真和實驗測試等方法,設計了無油化、全電控的制動系統(tǒng)。系統(tǒng)包括踏板模擬器、控制模塊和凸塊制動器三部分。踏板模擬器采用連桿傳動機構,變旋轉運動為直線運動,采集駕駛員作用在踏板上的指令,經控制模塊分析處理后,由電機驅動器控制步進電機工作,驅動凸塊制動器實現(xiàn)制動。通過搭建實驗臺測試,表明系統(tǒng)可以穩(wěn)定運行,達到了預期制動命令,實現(xiàn)了制動系統(tǒng)輕量化、模塊化和節(jié)能減排。
關鍵詞:線控;制動系統(tǒng);無油化;節(jié)能減排
中圖分類號:U463.5文獻標志碼:A
文章編號:1672-1098(2016)02-0062-06
Abstract:In view of the shortcomings of the traditional hydraulic braking system, such as great bulk and large energy consumption, it was improved by the XBW (X-by-wire) technology. By using the method of theoretical analysis, modeling and simulation and experimental testing, By using the method of theoretical analysis, modeling and simulation, and experimental testing, the non-oil, fully electronically controlled braking system was designed. The system consists of three parts: the pedal simulator, the control module and the bump brake. The pedal simulator with connecting rod drive mechanism converts rotational motion into linear motion. The drivers instructions on the pedal are collected, analyzed and processed by controlling module, and used to control stepper motor by motor driver to realize braking by driving bump brake. Test by experiments showed that the system operates stably, which performed expected braking commands, and its lightweight, modularization, energy-saving and emission reduction is realized.
Key words:X-by wire; braking system; non oil; energy saving and emission reduction
隨著社會的發(fā)展,汽車的保有量與日俱增,隨之帶來了嚴重的環(huán)境污染,對其進行節(jié)能減排研究顯得越來越迫切。制動系統(tǒng)作為汽車重要的組成部分,對其采用線控化改進,通過輕量化實現(xiàn)節(jié)能減排是未來汽車制動系統(tǒng)發(fā)展的重要方向[1]。
傳統(tǒng)制動系統(tǒng)多使用液壓油進行傳動,中間管路較多且結構復雜,而且在汽車安全性要求越來越高的背景下,已不能滿足制動實時性的要求[2],故需要對其進行線控化改進,以求實現(xiàn)輕量化的目標。系統(tǒng)采用線束代替制動管路傳遞制動信號和能量,經控制模塊對采集的制動信號進行處理,進而控制各個車輪的制動,使車輛減速。系統(tǒng)簡化了原有結構,提高了響應時間、靈敏度和駕駛安全性;極大的減輕了汽車整備質量,節(jié)省了燃油等能源消耗;省去了傳統(tǒng)制動管路和制動油液,節(jié)省了材料損耗,對汽車節(jié)能減排技術具有重大的實用意義。
XBW技術(即線控技術)在航空和軍事上已得到成功運用,在歐美等發(fā)達國家已開始將其應用于汽車領域,如奔馳CLK2004、奔馳 SL500以及邁巴赫62等車型,但仍采用電液復合方式,全線控化技術多處于概念車階段[3]。我國近些年在該領域已取得了重大研究進展,以吉林大學、湖南大學為代表的科研團隊已開發(fā)出制動系統(tǒng)實驗臺,具有較大的發(fā)展前景[4-5]。
1總體方案設計
本作品與傳統(tǒng)制動系統(tǒng)的設計方案對比如圖1所示,圖中1b,以電線6和電子制動器4來代替圖中1a的機械和液壓系統(tǒng),通過設計汽車制動模擬器2,將來自駕駛員的制動命令轉變?yōu)殡娮有盘枺洼喫?等信號一起輸入到控制計算機3,由此產生控制信號驅動電子制動器4進行制動。系統(tǒng)通過蓄電池電源5供電。線控制動系統(tǒng)分為操作機構、控制單元和執(zhí)行機構三大模塊,其技術路線如圖2所示。
由圖2可知,硬件部分主要是通過機械傳動結構和傳感器對制動指令進行采集,控制單元采集踏板信號,以及輪速等信號并進行分析處理,能夠做到對踏板位置的實時監(jiān)測,將制動力最優(yōu)分配,控制步進電機進行制動,并且控制各信號燈輸出相應的信號。執(zhí)行機構包括步進電機和制動器,步進電機接收控制單元輸出的控制命令,驅動制動器產生制動動作,實現(xiàn)制動。
2執(zhí)行機構的理論設計計算
1)某轎車主要技術參數(shù)。滿載質量:1 540 kg,空載質量:1 120 kg;質心位置:a=1.3 m b=1.356 m;質心高度:h=0.9 m;軸距:L=2.656 m;輪距:B=1.42 m;輪胎型號:195/60 R14 85H。
2)力學模型分析。在制動蹄與制動鼓接觸過程中,摩擦襯片受力的分布和變形規(guī)律的計算是關鍵問題,而摩擦襯片的徑向變形對制動器的制動效能影響最大(見圖3)。
3操作機構的理論設計計算
1)傳感器部分設計。對比分析霍爾式、電容式和電阻式傳感器,霍爾式傳感器具有成本低和抗干擾能力強的優(yōu)點,但由于其磁鐵數(shù)目有限且只能測出踏板在特定范圍內的位置信息,故不能輸出位移的連續(xù)曲線。電容式傳感器的線性精度高,但受制于裝空間和受力情況,且不能滿足使用壽命的要求。綜上,本作品采用可變電阻式傳感器。
2)機械傳動機構設計。對比分析連桿式和凸輪式兩類傳動機構見圖6。兩類傳動機構均能在踏板位置信號采集環(huán)節(jié)起到很好的瞬態(tài)特性,連桿機構設計相對簡單,且在實際生產加工過程中誤差較小,不易磨損,可以達到較長的使用壽命,而凸輪機構在實際應用中易磨損,且受使用環(huán)境的影響較大,因此本作品采用曲柄連桿機構對踏板運動進行傳動。
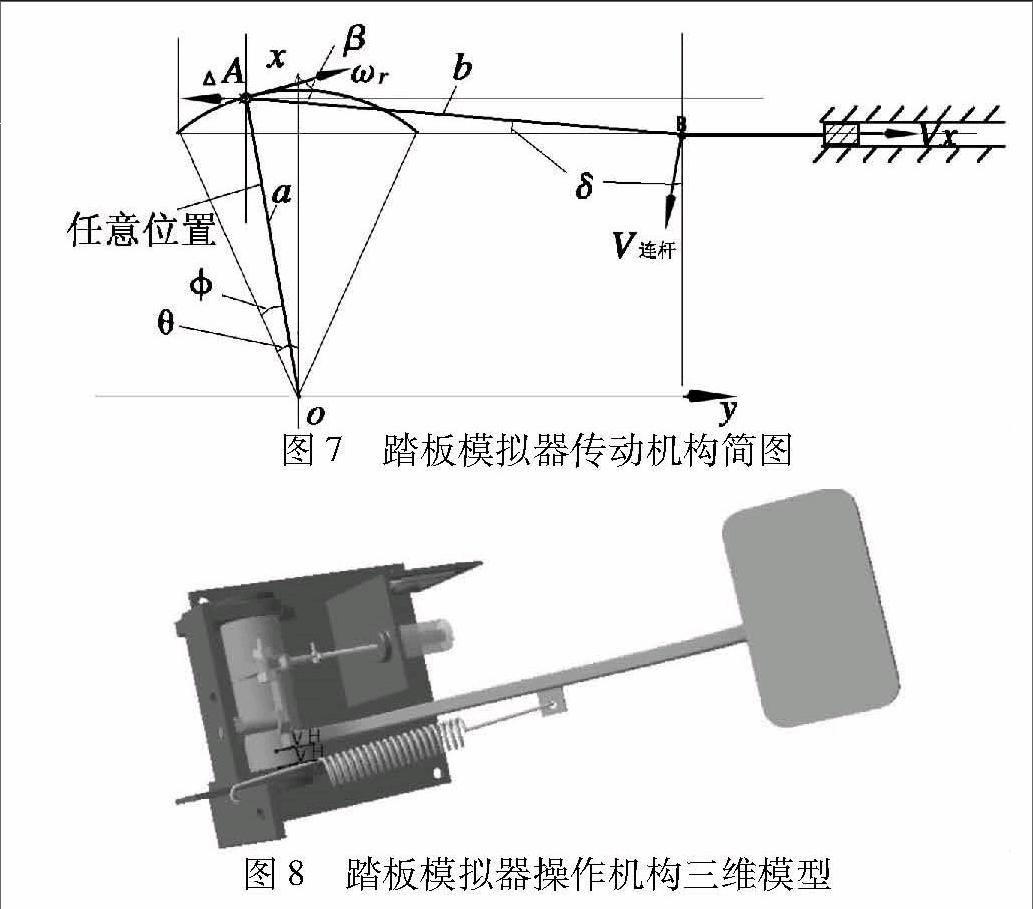
3)踏板模擬器操作機構設計。設計的踏板模擬器傳動機構如圖7所示,踏板模擬器操作機構三維模型如圖8所示。采用上述曲柄連桿機構對踏板運動進行傳動,轉換成變電阻式傳感器中滑動觸頭的運動,從而改變阻值,輸出相應的電壓值。對踏板模擬器操作機構進行運動學分析,得到傳感器輸出電壓與踏板轉角的關系可近似表示為
4控制系統(tǒng)的設計
控制系統(tǒng)采用單片機技術,分為系統(tǒng)硬件和軟件兩部分,硬件電路原理圖采用PROTEL開發(fā),軟件部分采用KEIL編寫。
5調試實驗
搭建實驗臺架,如圖9所示。以5°為單位改變踏板模擬器的角度,觀察凸塊制動器對蹄片的橫向觸動量,如表1和圖10所示。在這里所指的踏板模擬器角度值是模擬器與其初始位置間的夾角,凸塊制動器對蹄片的橫向觸動量是指在過凸塊軸心的水平方向上蹄片因凸塊的運動而改變的距離,該距離決定蹄片和其外圍制動鼓間的作用程度。
由圖11可知,當踏板模擬器角度在5°~10°變化時,蹄片橫向觸動量曲線由A點到a點斜率較大,改變了較大,說明空行程在其中起到了作用;當踏板模擬器角度在10°時,蹄片橫向觸動量達到0.5mm,基本消除了制動蹄片和制動鼓間隙;當踏板模擬器角度在10°~25°變化時,蹄片橫向觸動量曲線由a點到B點斜率相對較小,制動蹄片和制動鼓間作用力逐漸增加;當踏板模擬器角度在25°~45°變化時,蹄片橫向觸動量曲線較為平緩,完全制動摩擦。通過實驗調試,說明制動器可以可靠工作。
6結論
本文采用線控技術設計了無油化化的全電控制動系統(tǒng),模塊化和線控化的結構提高了系統(tǒng)的實用性和響應時間;無油化和輕量化的實現(xiàn)達到了汽車節(jié)能減排的目標。在汽車環(huán)保法規(guī)的壓力和驅動下,該系統(tǒng)的研究具有重要的意義,所產生的經濟效應也是難以估量的。
參考文獻:
[1]彭曉燕. 汽車線控制動系統(tǒng)安全控制技術研究[D].長沙:湖南大學,2013.
[2]羅明軍,謝亞清. 基于ANSYS鼓式制動器有限元模型的建立與分析[J].南昌大學學報:工科版,2010,32(2):201-204.
[3]日本自動車技術會編.中國汽車工程學會譯. 汽車工程手冊5:底盤設計篇[M].北京:北京理工大學出版社,2010:8-200.
[4]王望予.汽車設計[M].北京:機械工業(yè)出版社,2004:10-100.
[5]孫仁云.汽車電氣與電子技術[M].北京:機械工業(yè)出版社,2011:50-110.
(責任編輯:何學華吳曉紅)