大型民用飛機偏離特性與尾旋敏感性分析
2016-12-23 06:10:00黃靈恩YanWeiHuangLingen
民用飛機設計與研究 2016年2期
關鍵詞:飛機
顏 巍 黃靈恩 / Yan Wei Huang Lingen
(上海飛機設計研究院,上海 201210)
?
大型民用飛機偏離特性與尾旋敏感性分析
顏 巍 黃靈恩 / Yan Wei Huang Lingen
(上海飛機設計研究院,上海 201210)
為了研究某常規(guī)布局大型民用飛機的偏離特性與尾旋敏感性,在CARDC的FL-14水平風洞(Φ3.2m)中進行了飛機模型的大迎角靜態(tài)測力試驗。通過對試驗結果的充分挖掘,利用一系列的穩(wěn)定性判據進行分析,獲得了飛機的大致初始偏離迎角和偏離區(qū)間,并預測了飛機的尾旋敏感性。
大迎角試驗;偏離特性;尾旋敏感性
0 引言
失速、偏離和尾旋在飛機空氣動力學和飛行力學中是一個需要突出研究的方向。“失速”是指在近臨界迎角時,機翼上氣流分離大面積發(fā)展使飛機繞自身三根軸中某個軸自發(fā)地作非周期性的運動或擺動。“偏離”是指在近臨界迎角時,飛機繞某一機體軸轉動的現象,包括滾轉偏離、方向偏離和突然上仰。偏離的出現標志著飛機由可操縱飛行狀態(tài)向不可操縱飛行狀態(tài)過渡的一種短暫的、不限時間的運動。“尾旋(螺旋)”是指在超臨界迎角范圍內,飛機同時繞自身三根軸旋轉的自轉狀態(tài),沿小半徑的陡螺旋形軌跡的自發(fā)運動,尾旋是飛機最復雜的飛行狀態(tài)之一,也是飛機飛行的極限狀態(tài)。在航空事業(yè)發(fā)展初期,由于對飛機失速、偏離和尾旋的認識不足,導致了大量的飛行事故。根據公布的資料[1]表明,美國空軍在1966~1970年間由于失速螺旋,損失了226架飛機,價值3億6千7百萬美元。在1964~1972年間,美國民用航空飛機(中小型通用飛機為主)因失速、尾旋而導致的事故共2 490起,占整個民用航空飛機飛行事故的8%,占死亡或嚴重損傷事故的24%。隨著航空科技的進步,工程師們研究并發(fā)展了許多防止尾旋的措施,但到目前為止還不能研制出在任何情況下都不進入尾旋的飛機。飛機尾旋呈現多樣性,不同的飛機尾旋模態(tài)可能完全不同,即使同一架飛機在不同期試驗中,所獲得的尾旋模態(tài)也可能大相徑庭[2]。此外飛機在失速、偏離和尾旋時的姿態(tài)特點、操縱性、安定性、操縱條件和所需的操縱方法與正常飛行狀態(tài)時也不同,所以對飛機失速、偏離和尾旋進行相關的研究是非常必要的。本文以某常規(guī)布局大型民用飛機為例,如圖1所示,著重分析其偏離特性與尾旋敏感性,為飛機的失速飛行試驗提供初步理論依據。
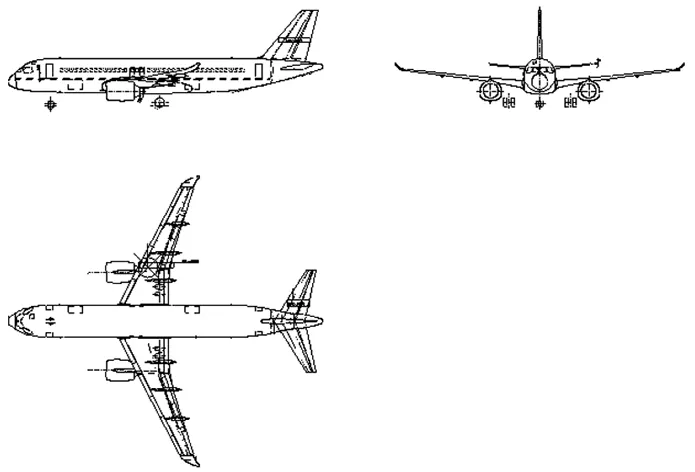
圖1 某常規(guī)布局大型民用飛機三面圖
1 偏離特性研究
1.1 航向靜穩(wěn)定性判據Cnβ
經典的航空理論[1]認為飛機的航向靜穩(wěn)定性Cnβ的大小是衡量飛機受到某一擾動后能否恢復原始狀態(tài)的關鍵,Cnβ隨攻角的變化曲線是研究飛機尾旋問題極其重要的曲線。在某一攻角下,如果Cnβ>0,說明飛機具有航向穩(wěn)定性,受擾動以后有自動恢復原航向的趨勢;如果Cnβ<0,則說明受擾動后飛機會喪失方向安定性,即方向偏離發(fā)散,在此范圍內飛機陷于喪失航向靜穩(wěn)定性,飛行員作任何滾轉、偏航或使用方向舵,都會使飛機出現過度的偏航,飛機發(fā)生偏離后,過度的偏航和滾轉速率都會使飛機在此區(qū)域內進入尾旋;Cnβ=0為臨界偏離發(fā)散狀態(tài),對應的攻角為臨界偏離攻角。方向發(fā)散的原因主要是大迎角下翼身組合體的洗流場對垂尾和方向舵的直接影響,以及在大攻角下垂尾的有效后掠角增大,二者均使得垂尾的效能降低。飛機的方向發(fā)散特性是幫助尾旋偏轉的,它對飛機超過失速迎角后可能進入尾旋和在尾旋中飛機高速旋轉起到重要作用。當然,要更全面地描述飛機尾旋運動中的航向安定性,還應當考慮飛機的橫側靜安定度和飛機的轉動慣量對航向安定性的影響。
1.2 橫向靜安定性判據Clβ
橫向靜安定性導數Clβ隨攻角的變化曲線是研究飛機尾旋特性的另一重要曲線[1]。在中、小攻角范圍內,飛機在有側滑時產生的滾轉力矩一般都是靜穩(wěn)定的。當側滑角為正值時,產生負的滾轉力矩,飛機所具有的這個特性稱為上反角效應,即Clβ。通常現代飛機,無論軍機還是民機在中、小攻角范圍內都具有較高的橫向靜穩(wěn)定性,但在大迎角時橫向靜穩(wěn)定會變差,即發(fā)生反號。一般情況下,只要飛機的橫向靜穩(wěn)定性數值為負值,即Clβ<0,飛機就不容易“自動”進入尾旋,若Clβ>0,飛機會發(fā)生非指令的滾轉偏離,Clβ=0為臨界偏離發(fā)散狀態(tài),對應的攻角為臨界偏離攻角。
1.3 Cnβ/|Clβ|判據
在飛機研發(fā)的初期,為了較快而簡便地預測飛機的偏離特性,通常利用常規(guī)風洞試驗技術所提供的氣動數據,通過利用經驗判據來進行判定。Tischler.MD,Barlow.JB和Bihrle.WJr在1979到1983年之間通過一系列的研究,提出了預測飛機發(fā)生偏離和尾旋的粗略的經驗判據[3]:對于飛機在某個α下是否存在發(fā)生尾旋的可能性,可以利用這個α所對應的Cnβ/|Clβ|接近“-10”來判定。根據這個經驗判據,利用飛機大迎角靜態(tài)測力試驗數據首先分別求得Cnβ和Clβ,然后求得Cnβ/|Clβ|,Cnβ/|Clβ|=-10所對應的攻角即為初始偏離迎角,在飛機迎角越過此一迎角后,飛機有進入尾旋的可能。
1.4 橫向操縱偏離判據LCDP[4,7]
在大量的飛行實踐中發(fā)現,飛機的橫向操縱明顯地影響著飛機的航向穩(wěn)定性。如當飛行員用副翼消除滾轉角時,副翼的不利偏航可能會擴大側滑,加上飛機正的上反效應,極有可能出現與預期方向相反的快速滾轉,使飛機出現橫向發(fā)散,加劇了飛機側滑的不安定,進而陷入尾旋。當單獨操縱副翼出現橫向發(fā)散時,操縱偏離判據AADP的定義如下式所示:
(1)
此后,又發(fā)展出了包含副翼和方向舵同時操縱的操縱偏離判據LCDP,定義如下式所示:
(2)
若LCDP>0,則說明在該迎角下,如向滾轉反方向壓桿,向滾轉方向蹬舵,副翼和方向舵所產生的偏轉力矩,試圖減小滾轉帶坡度所引起的側滑,加上飛機在桿、舵中立情況下具有方向靜安定性,飛機是方向靜安定的。若LCDP<0,表明在該迎角下,操縱副翼和方向舵所產生的偏轉力矩,力圖擴大滾轉帶坡度所引起的側滑,即使在桿、舵中立情況下具有方向靜安定性,操縱副翼和方向舵所產生的偏轉力矩,也會使飛機在總體上具有擴大側滑的趨勢,而喪失方向安定性,是方向不安定的。若LCDP=0,是副翼/方向舵操縱飛機是否會產生側滑偏離的臨界點。為了簡化計算,可以直接用AADP的公式來計算LCDP。
1.5 動航向穩(wěn)定性判據Cnβ,DYN
隨著航空科技的發(fā)展,發(fā)現如果僅用靜導數來判定飛機是否進入偏離與實際飛行狀況有較大差別,如當機翼有上反時,縱然Cnβ<0,飛機也不會發(fā)生偏離。現代大型客機均為后掠翼飛機,當飛機攻角處于臨界攻角附近時,即使副翼和方向舵沒有偏轉,飛機也會出現偏航發(fā)散。這就需要通過風洞試驗結果分析來獲得發(fā)生這一物理現象的攻角,即側滑偏離迎角。通過動航向穩(wěn)定性判據Cnβ,DYN來預測飛機的偏離特性和尾旋敏感性,這個判據綜合反映了在沒有操縱副翼、方向舵(即副翼、方向舵中立)的情況下,按機體軸確定的方向靜安定度和橫側靜安定度對飛機實際方向安定性的影響,也就是反映了飛機在副翼、方向舵中立情況下的尾旋敏感性[5,8-9]。其表達式如下:
(3)
當Cnβ,DYN>0時,表明當副翼、方向舵中立時飛機對于側滑角的瞬時反應具有還原的趨勢,即飛機對尾旋敏感性越弱,甚至不會進入尾旋。當Cnβ,DYN<0時,表明當副翼、方向舵中立時飛機對于側滑角的瞬時反應將使飛機增大側滑,發(fā)生偏離,飛機就越容易進入尾旋,尾旋敏感性越強。Cnβ,DYN=0,即處于臨界偏航狀態(tài)。
1.6 PELIKAN判據
PELIKAN判據也被稱為β+δ軸穩(wěn)定性指示法[6],它是確定一架飛機偏離迎角的工程方法,這種方法包括了兩個向量的大小和方向,其指向公式為:
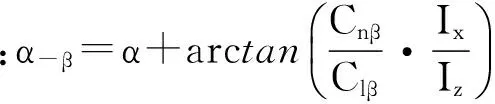
(4)
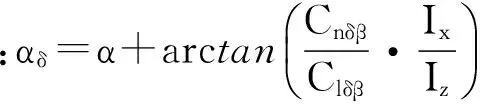
(5)
α-β:β軸穩(wěn)定性指示度;αδ:δ軸穩(wěn)定性指示度;其中β軸表示由側滑變化引起的沿機體軸x和y方向的兩個瞬時加速度反應矢量的合矢量;δ軸是由于橫向或橫向加航向操縱輸入所引起的瞬時加速度反應矢量。飛機的穩(wěn)定條件如下:
α-β>αδ且α-β>0
當α-β<αδ到α-β=0的迎角區(qū)間為潛在的不穩(wěn)定敏感區(qū),α-β=αδ所對應迎角為最小偏離迎角(臨界偏離迎角),α-β=0所對應的迎角一般是預計的最大偏離迎角。
1.7 WEISSMAN判據
由于Cnβ,DYN和LCDP這兩個參數并不孤立,它們之間相互影響相互制約,所以單獨使用有局限性。1973年Weissman建立了新的判據圖[6]:Weissman判據圖,將Cnβ,DYN和LCDP這兩個參數一并考慮畫在圖上,并將圖中分為不同的區(qū)間,用來表示飛機的偏離程度,如圖2所示。需要說明Weissman判據僅針對β=0°時的情況。在美國以往的許多飛機型號的研制過程中,包括F-4E,F-111,F-8,F-102,F-106,Saab-37,YF-16,YF-17,利用Weissman判據所判定的飛機偏離邊界與偏離程度,和飛行試驗結果基本吻合。

圖2 WEISSMAN判據
1.8 耦合偏離判據Cmβ
飛機在亞臨界迎角范圍內飛行,飛行員進行柔和的操縱動作時,各個方向上的氣動力耦合可以忽略。但是當飛機在近臨界迎角范圍內和超臨界迎角范圍內飛行時,縱向運動與橫側運動之間必定存在強烈的耦合[3]。飛機由于側滑會引起非指令的抬頭俯仰力矩,Cmβ>0,尤其是在機翼搖擺時,將導致迎角持續(xù)而較大地增加。即在有側滑的大迎角機動中,若Cmβ>0,則有可能發(fā)生非指令的俯仰偏離,Cmβ=0時的攻角即為飛機的俯仰偏離的臨界點。
1.9 卡爾菲斯特(Kalviste)判據
飛機在中或小攻角狀態(tài)飛行時,氣動力基本為線性變化,所以對于穩(wěn)定性的分析可以分解為縱向運動分析和橫航向運動分析。但是在大攻角時,氣動力呈現強烈的非線性,縱向運動和橫航向運動之間存在強烈的耦合,所以不能簡單地分解來進行分析,而必須使用完整的六自由度運動方程來分析。Kalviste在1978年提出了一個新的、更為全面的分析飛機縱向和橫航向運動穩(wěn)定性的卡爾菲斯特第一判據和卡爾菲斯特第二判據[3]。卡爾菲斯特第一判據為非耦合判據,卡爾菲斯特第二判據為耦合判據。其中卡爾菲斯特第二判據是將六自由度方程用一組表示轉動運動和平動運動加速度的六個非線性二階微分方程來描述,方程中保留了縱向運動和橫航向運動之間的交叉耦合項。
1.9.1 卡爾菲斯特第一判據
卡爾菲斯特第一判據仍然是縱向和橫航向非耦合判據,即前提為:CmβD=0, CnαD=0。它的穩(wěn)定性判據為:
(6)
其中:
(7)
(8)
1.9.2 卡爾菲斯特第二判據
卡爾菲斯特第二判據是縱向和橫航向耦合判據。第二判據采用了一種新的軸系—動穩(wěn)定軸系或稱“α,β,μ”軸系。α為速度矢量的攻角,β為速度矢量的側滑角,μ為繞速度矢量的轉角。在此一軸系下的的加速度為:
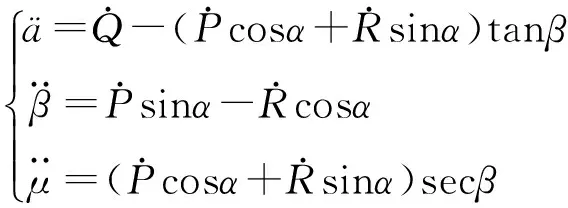
(9)
由于氣動力僅是α和β的函數,所以:

對氣動力取偏導數并應用拉普拉斯變換公式獲得:
(S2-Mα,DYN)α-(Mβ,DYN)β=0
(10)
(S2+Mβ,DYN)α+(Mα,DYN)α=0
(11)
其特征多項式為:
S4+AS2+B=0
(12)
式中,A=Nβ,DYN-Mα,DYN,B= Nα,DYN× Mβ,DYN-Nβ,DYN× Mα,DYN,
當A2-4B>0時,
S4+AS2+B=(S2+Nβ,cop)×(S2-Mα,cop)
(13)
式中:
(14)
(15)
D=sign(Nβ,DYN+Mα,DYN)
(16)
其中,Nβ,cop是耦合的荷蘭滾模態(tài)頻率平方,-(Mα,cop)是耦合的俯仰短周期頻率平方。當Nβ,cop≥0和Mα,cop≤0時飛機是穩(wěn)定的。用無量綱參數表示時,上式變?yōu)椋?/p>
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
(25)
在縱向運動與橫航向運動耦合時,即CmβD≠0,CnαD≠0時,穩(wěn)定性判據為同時滿足:
(26)
1.10 JOHNSTON判據
到目前為止,以上對于飛機偏離特性和尾旋敏感性的分析均基于飛機大迎角靜態(tài)測力試驗。在失速之前,或小迎角條件下,飛機的飛行比較穩(wěn)定,動導數作為次要量,可以完全忽略。然而當飛機在失速攻角附近,或大迎角條件下飛行時,由于氣流的分離,渦的脫落與破碎,飛機縱向和橫向運動的氣動交感作用,遲滯現象等氣動現象的存在,動導數對飛行器氣動特性的影響就不可忽略。對于研究飛機的失速、偏離和尾旋,動導數是必不可少的。對于研究飛機的偏離特性,Johnston.DE.在1981年推導出了包含靜、動導數數據的大迎角偏離解析判據[3]:CnβDd,飛機無偏離的條件為:
CnβDd-ξ>0
否則,飛機會發(fā)生偏離。ξ經驗確定為-0.006。上式中參數的定義為:
CnβDd=(1-K)CnβD+K(LCDP)cosα
(27)
(28)
根據這個判據可以推導出更加完整的飛機的偏離邊界。
2 各個判據所獲得偏離迎角的對比
在以上十個判據中,Cnβ判據、Cnβ,DYN判據、LCDP判據、WEISSMAN判據、PELIKAN判據和Kalviste判據曾在1970年代研制運10飛機過程中使用過[10]。
利用這十個判據分析了某大型民用飛機的偏離特性與尾旋敏感性,通過詳細計算獲得了飛機的偏離迎角,表1展示了各個判據給出的偏離迎角。由于各個判據的側重點不同,所以獲得的偏離迎角有差異,綜合來說在α∈[H°,I°]的區(qū)間是這架飛機的偏離區(qū)間,也可認為是飛機由可操縱狀態(tài)向不可操縱狀態(tài)發(fā)展的過渡區(qū)間。從飛機失速試飛的安全角度考慮,初始偏離迎角應當考慮定在α=H°,當飛機迎角到達此迎角時,飛行員就需要非常謹慎地進行橫航向操縱,避免飛機進一步向尾旋狀態(tài)發(fā)展。
根據以上十種判據的分析結果還可以探討性地預估這架飛機失速、偏離和尾旋的全過程:飛行員拉桿迫使飛機增大迎角,隨著迎角增大左右機翼開始發(fā)生分離,但左右機翼的分離并不完全對稱,這樣機翼就會發(fā)生左右搖滾,導致飛機出現側滑,滾轉運動和偏航運動的耦合使飛機發(fā)生俯仰偏離,當飛機俯仰至某一特定攻角時,全機喪失航向穩(wěn)定性并發(fā)生偏航偏離,最終陷入尾旋。對于偏離程度和尾旋敏感性,根據WEISSMAN判據,當飛機攻角越過E°之后飛機發(fā)展到中度偏離狀態(tài)(E區(qū)),飛機會進入尾旋,當攻角達到(E+4)°時,飛機處于強烈偏離區(qū)域(D區(qū))的邊緣,表明飛機極易進入尾旋。
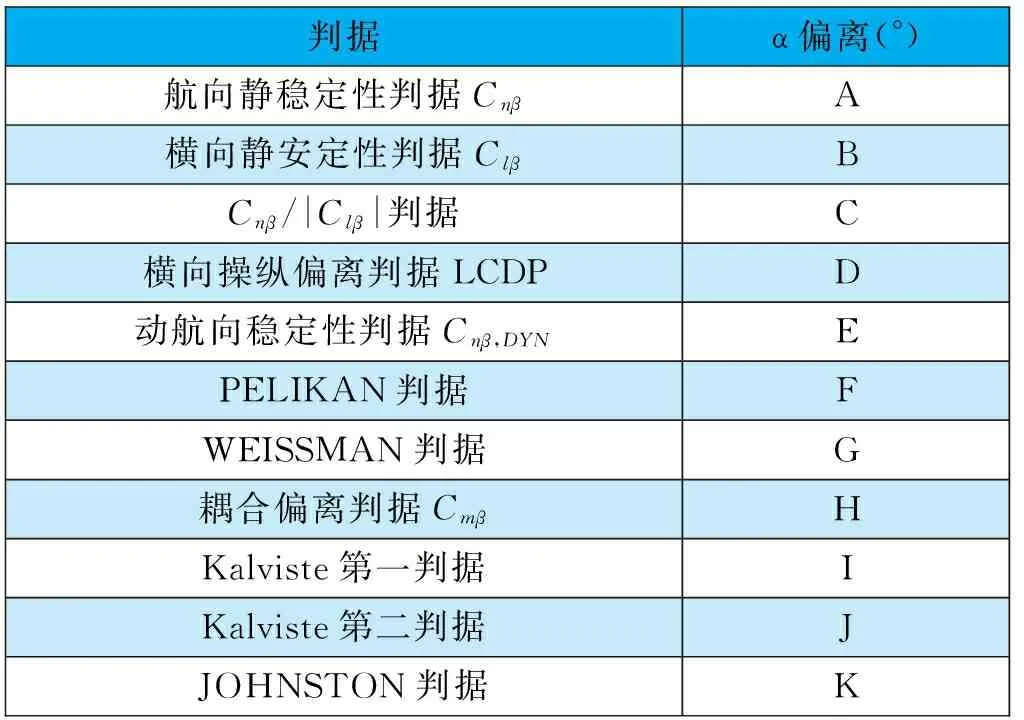
表1 各判據給出的偏離迎角(β=0°)
3 結論
本文利用了十種穩(wěn)定性判據預測某常規(guī)布局大型民用飛機的偏離特性和尾旋敏感性,獲得了這架飛機的偏離區(qū)間。這些判據都各自從不同方面反映了這架飛機的大迎角運動特性,一些判據中有些只包括橫向參數或航向參數,而有些是耦合判據,包含有縱向、橫航向參數。所以在進行飛機偏離特性和尾旋敏感性分析時,應盡可能全面的利用各種判據進行分析,預測飛機在大迎角時的偏離特性和尾旋敏感性。
[1] M.Г.科契克.飛機螺旋動力學[M].中國人民解放軍空軍司令部出版,1978.
[2] M.Г.科契克.極限狀態(tài)飛行——現代飛機失速和尾旋的預防[M].北京:航空工業(yè)出版社,1989.
[3] 李永富,陳洪.研究尾旋的風洞試驗技術[M].北京:國防工業(yè)出版社,2002.
[4] 涂良輝,江積祥.某型飛機的偏離特性/尾旋敏感性分析[J].科學技術與工程,2010,10(25).
[5] 桑雨生,等.F-16飛機大迎角飛行偏離/尾旋特性分析[J].飛行力學,2002,20(1).
[6] 張錫金,等.飛機設計手冊第6冊:氣動設計[M].北京:航空工業(yè)出版社,2002.
[7] 李樹有.偏離特性和尾旋敏感度預測判據探討[R].西安:630所.
[8] 張洪.飛機大迎角飛行穩(wěn)定判據分析[R].上海:640所.
[9] 張洪.飛機偏離預測的研究[R].上海:640所.
[10] 凌茂芙.預測飛機偏離特性和尾旋靈敏度判據的發(fā)展和現狀[R].上海:640所.
Departure Characteristics and Spin Sensitivity Analysis for A Large Civil Aircraft
(Shanghai Aircraft Design and Research Institute,Shanghai 201210,China)
In order to study departure characteristics and spin sensitivity analysis for a large general layout civil aircraft, an aircraft model force and moment measurement tests were carried out in CARDC FL-14 (Φ3.2m) horizontal wind tunnel. Base on the analysis of the experimental results and several stability criterion be used, a roughly initial departure angle of attack and departure region were obtained and spin sensitivity of aircraft was predicted.
high angle of attack experiments; departure characteristics;spin sensitivity
V328
A
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
