水中人工心臟泵用磁軸承系統的模型及控制研究
2016-12-23 02:59:03孫坤,陳琛
制造業自動化 2016年7期
孫 坤,陳 琛
(蘇州大學 機電工程學院,蘇州 215021)
水中人工心臟泵用磁軸承系統的模型及控制研究
孫 坤,陳 琛
(蘇州大學 機電工程學院,蘇州 215021)
提出水環境下磁懸浮血泵轉子運動模型,將水對泵轉子的作用等效成彈簧阻尼器,利用ADAMS與Simulink聯合仿真;并針對水中磁懸浮血泵,通過分析并調整PD控制器的微分系數,實現在保證轉子穩定性能的同時,改善轉子位移信號。
人工心臟泵;阻尼器;PD調節;改善信號
0 引言
磁軸承由于具有無機械摩擦、無接觸磨損、無需潤滑、定位精度高、轉速高且對環境無污染[1]等優點逐漸被人工心臟[2]、電主軸機床[1]等領域所應用。作為典型的開環非穩定系統,電磁軸承通過主動控制器,利用可控電磁力為懸浮轉子提供高精度的定位控制和振動阻尼控制[3]。
人工心臟用電磁軸承是在血液中工作的,但目前其建模以及控制器設計與一般工業用電磁軸承類似[4],都是在空載環境下所進行的,再經過增益等方面的調節,使得血泵在液體中運行穩定。建模上的誤差無疑會導致磁懸浮系統運行性能較差,也阻礙了人工心臟用磁軸承的研制進程。另外對于磁懸浮血泵這類不規則的幾何模型,在水、血液等流體中的運動模型目前也很少有理論上研究。針對蘇州同心醫療公司的新一代磁懸浮人工心臟泵,如圖1所示,本文提出了水中磁懸浮系統模型,通過在ADAMS中建立機械模型,與Simulink聯合仿真。針對所使用的經典PD控制,考慮到水中磁軸承系統本身存在阻尼,對微分環節作適當減弱,以改善信號輸出。

圖1 同心醫療China Heart III磁懸浮人工心臟
1 磁懸浮系統理論建模
磁懸浮血泵同一般主動磁軸承原理相同,由徑向兩自由度(或四自由度)和軸向一自由度構成,因轉速不是太高且為剛性轉子,完全可以忽略陀螺效應,故其可以解耦為單自由度磁懸浮系統分別進行控制,這樣也方便了簡單PD控制器的應用。
對于水中磁懸浮系統,本文根據[1]關于單自由度磁懸浮系統模型,以及將水沖擊力視為平衡點附近位移和速度的函數[5],寫出當泵轉子在靜平衡位置附近作小振動時,運動方程可以寫為:

其中,m為泵轉子質量,x為轉子徑向位移,kx為位移-力剛度系數,ki為電流-力剛度系數,kxx、kxv、kxv、cxx和cxy分別為轉子受水影響的剛度和阻尼系數。
從式(1)可以看到,一般磁懸浮只有負剛度,缺少阻尼項,所以是典型的開環非穩定系統,而PD控制的比例與微分環節實質上就是調整磁懸浮系統的剛度,并增加其阻尼成分[6]。而對于水中的磁懸浮泵,水對泵轉子恰好可以增加其阻尼項。
該型人工心臟用磁懸浮轉子為圓環狀,其頂端焊有葉片,水、血液等流體對該類型物體的作用較為復雜,很難從理論上進行推導研究,故本文將流體對泵轉子的作用等效為彈簧阻尼力。根據[7]及本磁懸浮系統結構參數,如表1所示,可以大致計算出c=30Ns/m,k=0.5N/m(忽略y方向對x方向耦合)。本文再對該泵環路測試,得到環路傳輸特性圖(如圖2所示)。從圖中可以看出,水載測試中,其阻尼增加值與計算值偏差不大,說明水中泵轉子運動模型較為合理。初取c=24Ns/m,k=0.5N/m,以便在ADAMS與Simulink仿真中作微調。
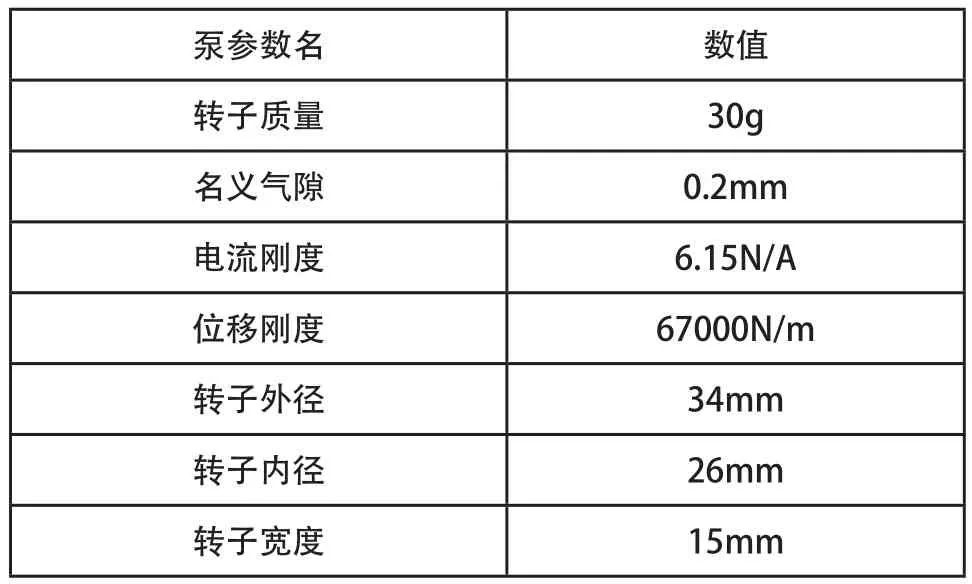
表1 系統結構系數

圖2 人工心臟泵環路傳輸特性
2 ADAMS與Simulink聯合仿真
磁軸承系統研究一般把其力學系統看作傳遞函數,通過MATLAB/Simulink對磁懸浮軸承整體系統進行仿真的,但是這種仿真在建立系統機械模型時,尤其是在液體環境下,不夠精確,而ADAMS能夠更好地綜合考慮各個因素對磁懸浮軸承整個系統的影響,對現實的實驗也具有更好的指導意義[8]。
首先在SolidWorks建立磁懸浮泵的幾何模型,把它導入ADAMS里面。在ADAMS中定義定子固定約束,轉子為平面副,并設置與定子碰撞接觸。為了考慮水對泵轉子的作用,在泵轉子與定子之間建立徑向均布5個彈簧拉壓阻尼器,其阻尼即為上文所計算值。設置狀態變量有x、y方向徑向力x、y方向位移,并將x、y方向徑向力設為輸入變量,x、y方向位移設為輸出變量。
控制系統是用MATLAB/Simulink模塊來設計,由上述可知,磁懸浮泵式不穩定的,因此采用PD控制對系統仿真,環路還包含一個相位超前環節以及傳感器低通、功率放大器環節,如圖3所示。圖4(a)是未考慮阻尼時的階躍響應,圖4(b)是考慮了阻尼的響應,可以發現考慮阻尼時的響應時間稍慢些,但超調量很小。說明水抑制了泵轉子的振蕩,改善了泵轉子的性能。并通過對該泵進行空載與水載起浮試驗(如圖5所示,a.空載,b.水載),可以看出水載時的起浮較為平穩,大約需要5ms,而空載時稍快一些。通過微調ADAMS模型中的阻尼值至c=20Ns/m,響應時間相當吻合。
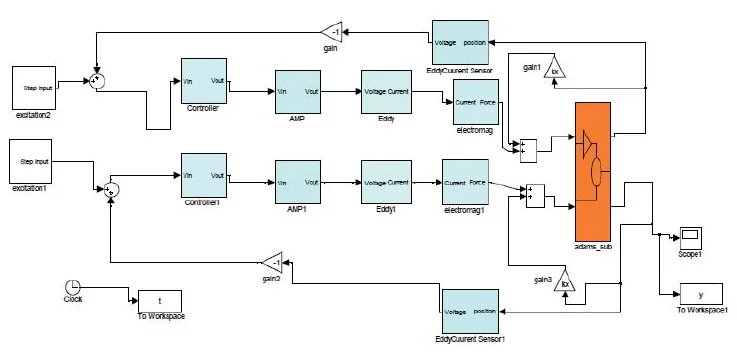
圖3 磁懸浮系統ADAMS/Simulink聯合仿真模塊圖
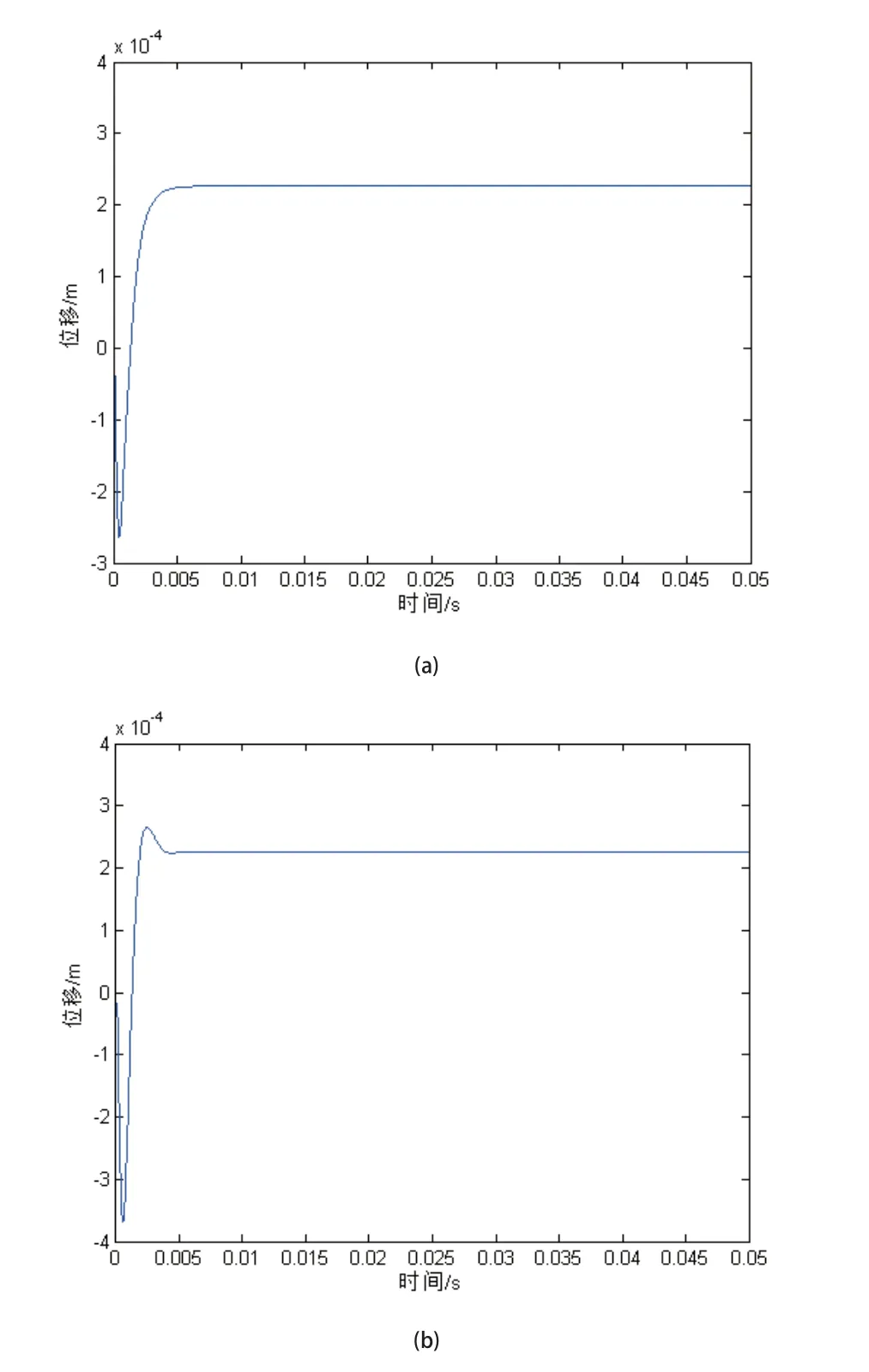
圖4 磁懸浮系統階躍響應模塊

圖5 磁懸浮泵空載與水載起浮試驗
3 PID微分環節的調節
從圖6(a)可以看出,空載時的轉子起浮是穩定的,滿足性能要求,只是在起浮后期有170ms的振蕩,而水載時圖6(b)幾乎沒有振蕩。因此,我們可以針對該人工心臟泵,考慮放寬微分環節,以此減弱微分對高頻噪聲放大的影響。本文共設置了遞減的4個微分系數Td=0.0013288、0.0011、0.00077和0.00044(通過改變電阻值),分別探究泵轉子起浮性能及位移信號的改善程度。

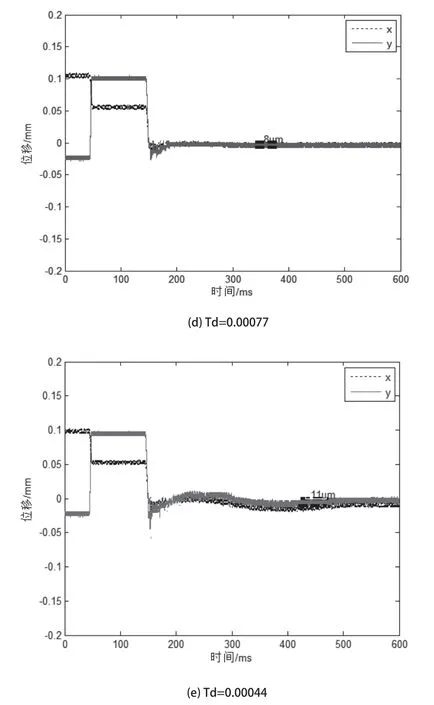
圖6 各不同條件下泵轉子全起浮過程位移輸出(a.空載, b-e.水載)
從圖中可以看出,在Td降至0.0011時,起浮很好,并未出現振蕩,位移信號有所改善。當降至0.00077時,起浮仍然穩定,稍有振蕩,但位移信號含噪量明顯降低。再降至0.00044時,有明顯振蕩,振幅達到50um,位移信號未出現改善,此時表明系統已出現阻尼不足,趨向不穩定,更起不到對輸出信號的改善作用。因此表明,針對水中磁懸浮運行的控制系統可以空載控制系統為基礎,且充分利用水中模型的特點,適當調節微分環節,達到實現穩定性能良好的同時改善輸出信號質量。
4 結論
本文針對人工心臟泵用磁懸浮系統,建立了水中磁懸浮系統模型,引入阻尼項,并借助ADAMS與Simulink聯合仿真,表明了水對磁懸浮泵轉子振蕩的抑制作用。又通過調節空載下PD控制器的微分項,減弱對微分的需要,探索水的作用對于磁懸浮系統阻尼的放寬程度,從而在保證泵轉子性能穩定且良好的同時降低位移噪聲。
【】【】
[1] Gerhard Schweitzer, Eric H. Maslen.Magnetic Bearings-Theory, Design,and Application to Rotating Machinery[M]. New York: Springer,2009.
[2] Nojir, C.,Kiijima,T.,Maekawa,J..Recent Progress in the Development of Termo Implantable Left Ventricular Assist System[J].ASAIO Journal,1999,45(3):199-203.
[3] 謝振宇,張景亭,高華,等.帶阻尼器磁懸浮軸承轉子系統的不平衡響應[J].中國機械工程,2009,20(3):327-330.
[4] 雷世東,袁小陽.人工心臟電磁軸承概念設計的知識基礎[J].機械科學與技術,2004,23(3):293-296.
[5] 聞邦椿,顧家柳,夏松波,等.高等轉子動力學[M].北京:機械工業出版社,2000.
[6] A. Chiba,T.Fukao,O.Ichikawa. Magnetic Bearings and Bearingless Drives[M].Oxford:Elsevier,2005.
[7] 董躍.液壓軸承油膜穩定性分析[J].機電產品開發與創新,2012,25(5):155-157.
[8] 馮恒.磁懸浮軸承系統仿真研究[D].南京航空航天大學,2010.
Research on model and control of magnetic bearing applied in artifi cial heart in the water
SUN Kun, CHEN Chen
TH133.3
A
1009-0134(2016)07-0005-04
2016-03-19
孫坤(1992 -),男,江蘇漣水人,碩士研究生,研究方向為人工心臟、磁懸浮軸承控制以及有限元仿真等。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45