基于PLC的三軸機(jī)械手控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2016-12-23 02:59:04管文娟
制造業(yè)自動化 2016年7期
關(guān)鍵詞:信號設(shè)計(jì)
劉 燕,鄒 萍,管文娟
(常熟理工學(xué)院 電氣與自動化學(xué)院,常熟 215500)
控制技術(shù)
基于PLC的三軸機(jī)械手控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
劉 燕,鄒 萍,管文娟
(常熟理工學(xué)院 電氣與自動化學(xué)院,常熟 215500)
三軸機(jī)械手作為智能制造系統(tǒng)中的一個重要組成部分,在工業(yè)生產(chǎn)領(lǐng)域得到了廣泛的應(yīng)用。根據(jù)三軸機(jī)械手運(yùn)行控制要求,以PLC為核心控制器,應(yīng)用步進(jìn)驅(qū)動、傳感器監(jiān)測、觸摸屏技術(shù),結(jié)合氣動驅(qū)動等多項(xiàng)技術(shù),設(shè)計(jì)滿足準(zhǔn)確定位、牢固抓取及移動要求的控制系統(tǒng)。通過對其程序柔性化的設(shè)計(jì),可以實(shí)現(xiàn)機(jī)械手不同運(yùn)行軌跡的操作,以此驅(qū)動現(xiàn)代制造業(yè)自動化技術(shù)的大力發(fā)展。實(shí)際運(yùn)行表明,該控制系統(tǒng)的設(shè)計(jì)具有很好的實(shí)際應(yīng)用價值。
三軸機(jī)械手;步進(jìn)驅(qū)動;控制系統(tǒng);運(yùn)行軌跡
0 引言
智能制造技術(shù)的發(fā)展使機(jī)械手已成為了現(xiàn)代制造生產(chǎn)系統(tǒng)中的一個重要組成部分,它替代人類手臂可完成搬運(yùn)、抓取、移位等一系列動作。三軸機(jī)械手作為空間運(yùn)動機(jī)構(gòu)可以在高溫、高壓、潮濕、粉塵、污染性等惡劣環(huán)境下實(shí)現(xiàn)多種運(yùn)行,完成人類無法完成的操作,因此在工業(yè)生產(chǎn)領(lǐng)域得到了廣泛的應(yīng)用。三軸機(jī)械手的廣泛應(yīng)用,對其運(yùn)行控制的要求不斷提高,準(zhǔn)確的定位、牢固的抓取、移動已成為對機(jī)械手運(yùn)行性能的基本要求,也成為自動生產(chǎn)線降低作業(yè)成本、提高作業(yè)能力和效率的重要保證。基于PLC的三軸機(jī)械手控制系統(tǒng),以PLC為核心控制器,應(yīng)用步進(jìn)驅(qū)動、傳感器監(jiān)測、觸摸屏技術(shù),結(jié)合氣動驅(qū)動等多項(xiàng)技術(shù),通過對控制系統(tǒng)的柔性化設(shè)計(jì),實(shí)現(xiàn)機(jī)械手不同的操作,以此驅(qū)動現(xiàn)代制造業(yè)自動化技術(shù)的大力發(fā)展,并帶動實(shí)現(xiàn)技術(shù)更加復(fù)雜的生產(chǎn)和操作以及裝配工藝要求更高的流程化過程。
1 三軸機(jī)械手平臺結(jié)構(gòu)及控制要求
1.1三軸機(jī)械手平臺結(jié)構(gòu)
三軸機(jī)械手的機(jī)械結(jié)構(gòu)如圖1所示,主要由傳感器、X軸移動平臺、Y軸移動平臺、Z軸移動平臺、工件放置平臺、步進(jìn)電機(jī)和吸盤等組成。其中M1,M2,M3分別是Y,X,Z軸的步進(jìn)電機(jī),控制機(jī)械手運(yùn)行過程中的移動位置;PH1、PH2、PH3、PH4、PH5、PH6、PH7、PH8、PH9為X、Y、Z軸移動平臺上的傳感器,作為三個軸的極限和原點(diǎn)位置的監(jiān)測信號;YV1為吸盤,吸取物料,放下物料。
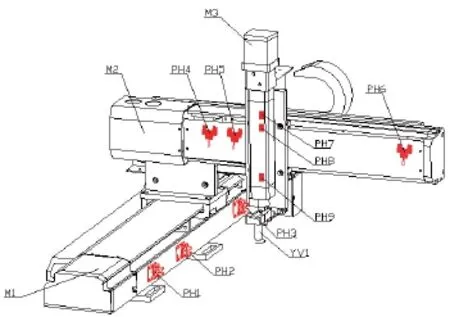
圖1 三軸機(jī)械手平臺結(jié)構(gòu)
1.2控制系統(tǒng)的要求
在生產(chǎn)過程中隨著加工工藝的不同,機(jī)械手執(zhí)行軌跡總在發(fā)生變化。為了說明問題,下面以兩種典型的控制工藝為例闡述其設(shè)計(jì)思路。
1)控制方式一:機(jī)械手自動循環(huán)完成一個周期的操作,通過移動、吸取等動作將物料從A區(qū)移動到B區(qū),并在工件放置平臺上擺放成方形形狀。若在執(zhí)行過程中按下停止按鈕,機(jī)械手將停留在該工序上,再按下啟動按鈕,則又從該工序繼續(xù)工作;
2)控制方式二:具體操作流程與方式一控制類似,其機(jī)械手運(yùn)動的最終目標(biāo)是將物料擺放出圓形形狀。
上述的運(yùn)行軌跡需要機(jī)械手在三維坐標(biāo)中完成向左移動、向右移動、向前移動、向后移動、向上移動、向下移動、吸氣和放氣等動作。兩種運(yùn)行中可設(shè)置手動運(yùn)行或連續(xù)自動運(yùn)行方式,且在每次開機(jī)初始化完成后,機(jī)械手需要進(jìn)行原點(diǎn)搜索。
2 控制系統(tǒng)的硬件設(shè)計(jì)
2.1系統(tǒng)硬件組成
根據(jù)控制系統(tǒng)的要求,系統(tǒng)硬件設(shè)計(jì)如圖2所示,主要由PLC、觸摸屏、步進(jìn)驅(qū)動和傳感器監(jiān)測等部分組成。傳感器等外部信號通過輸入單元送入PLC內(nèi)部進(jìn)行邏輯運(yùn)算預(yù)處理,再經(jīng)過PLC輸出單元向X軸、Y軸、Z軸步進(jìn)驅(qū)動器和電磁閥發(fā)出信號,驅(qū)動電機(jī)運(yùn)行并控制機(jī)械手吸盤的動作。各組成部分的功能如下:
1)觸摸屏:監(jiān)控系統(tǒng)的運(yùn)行過程。選擇MCGS中的TPC7062觸摸屏作為系統(tǒng)上位監(jiān)控系統(tǒng)。觸摸屏是人機(jī)交互系統(tǒng)中的一部分,主要包含了HMI硬件和畫面組態(tài)軟件兩部分。
2)PLC控制器:接收按鈕開關(guān)信號和傳感器信號,同時控制三個步進(jìn)驅(qū)動器。選擇西門子CPU226PLC作為控制器,X軸、Y軸、Z軸傳感器監(jiān)測信號以及啟動、停止的按鈕信號分別接至CPU226的輸入端, PLC輸出端則接步進(jìn)驅(qū)動器及電磁閥。
3)傳感器檢測信號:傳感器檢測信號由三軸機(jī)械手中各部分安裝的傳感器產(chǎn)生,選擇光電傳感器作為三個軸的極限和原點(diǎn)。
4)步進(jìn)驅(qū)動器和步進(jìn)電機(jī):步進(jìn)驅(qū)動器和步進(jìn)電機(jī)組成步進(jìn)驅(qū)動單元驅(qū)動機(jī)械手在三個方向的軸上運(yùn)動。步進(jìn)電機(jī)選擇為Kinco 2S45Q-02054,該步進(jìn)電機(jī)是兩相四線的電機(jī)。步進(jìn)驅(qū)動器選擇為2M530的Kinco。
5)電磁閥:控制機(jī)械手吸盤的吸氣和放氣動作。
6)機(jī)械手:主要控制對象,運(yùn)動由電機(jī)和吸盤控制。圖2中的機(jī)械手為氣動機(jī)械手,以空氣壓縮機(jī)為動力源,進(jìn)行能量或信號傳遞。
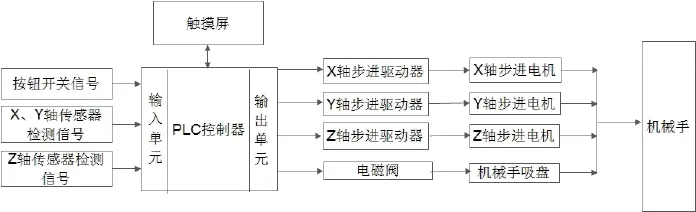
圖2 系統(tǒng)硬件組成框圖
2.2步進(jìn)驅(qū)動電路設(shè)計(jì)
步進(jìn)驅(qū)動單元由步進(jìn)驅(qū)動器和步進(jìn)電機(jī)組成,通過和PLC控制器的連接來驅(qū)動機(jī)械手的運(yùn)動。步進(jìn)驅(qū)動器作為步進(jìn)電機(jī)的驅(qū)動部分,接收從PLC發(fā)出的脈沖信號和方向信號從而控制步進(jìn)電機(jī)的轉(zhuǎn)動。具體接線電路如圖3所示。將X軸步進(jìn)驅(qū)動器的PLS+、DIR+分別接至PLC的Q0.0和Q0.2點(diǎn)。PLS為脈沖信號,DIR為方向信號,每一個脈沖信號的上升沿驅(qū)動電機(jī)轉(zhuǎn)動一步,而方向信號則是控制步進(jìn)電機(jī)轉(zhuǎn)動的方向。將步進(jìn)驅(qū)動器的A+、A-、B+、B-與步進(jìn)電機(jī)的動力線相連。Z軸步進(jìn)驅(qū)動器電路設(shè)計(jì)思路與X軸、Y軸類似,不再贅述。
3 控制系統(tǒng)程序的設(shè)計(jì)
控制系統(tǒng)的軟件設(shè)計(jì)是整個控制要求得以實(shí)現(xiàn)的核心。基于STEP 7-Micro/WIN的編程軟件,機(jī)械手的運(yùn)動控制過程需要具體的程序?qū)崿F(xiàn)。為了便于查看和修改程序,在主程序設(shè)計(jì)中采用了調(diào)用程序塊的方式,分別編寫了尋零、啟動、停止、運(yùn)行等子程序。如圖4所示。
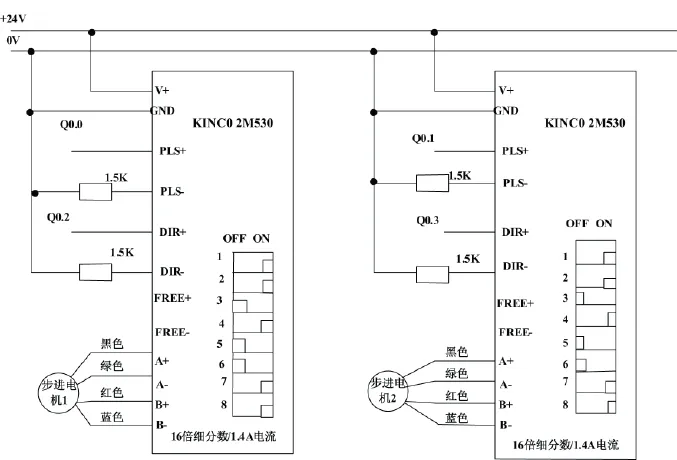
圖3 步進(jìn)驅(qū)動器接線圖
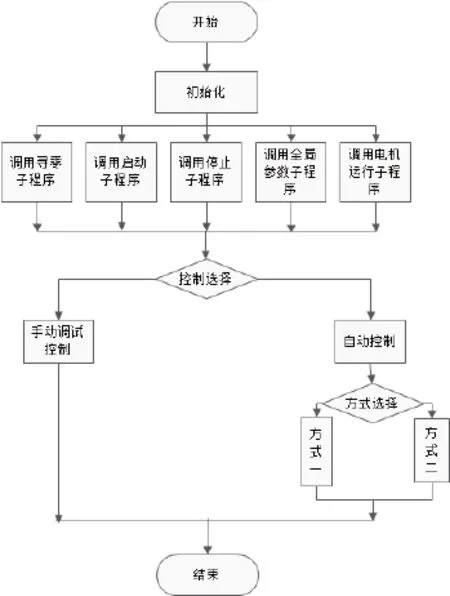
圖4 主程序設(shè)計(jì)框圖
在程序運(yùn)行之前需要初始化內(nèi)部寄存器,同時對外部的外接設(shè)備也進(jìn)行初始化,電機(jī)及氣缸復(fù)位。在初始化完成后調(diào)用各個子程序。尋零程序塊是使用指令控制或Q0_x_Home功能塊使步進(jìn)電機(jī)執(zhí)行X軸、Y軸、Z軸回原點(diǎn);在尋零完成以后響應(yīng)請求啟動、停止和全局參數(shù)調(diào)用等功能。子程序中還設(shè)計(jì)了手動調(diào)試與自動控制的切換程序。采用PTO指令向?qū)нM(jìn)行手動調(diào)試程序的編寫,通過編程向?qū)蒔TO指令模塊完成手動調(diào)試過程。在自動控制中設(shè)計(jì)了方式一、方式二的切換程序。在完成控制方式的選擇以后,即可進(jìn)行驅(qū)動電機(jī)的運(yùn)行。下面就尋零程序設(shè)計(jì)和自動控制方式一程序設(shè)計(jì)進(jìn)行闡述。
3.1尋零程序設(shè)計(jì)
使用指令控制步進(jìn)電機(jī)執(zhí)行X軸、Y軸、Z軸回原點(diǎn)動作,如果上電后步進(jìn)電機(jī)不執(zhí)行尋零動作,則將以掉電前步進(jìn)電機(jī)所在的位置作為原點(diǎn)位,使用Q0_x_Home功能塊尋找X軸、Y軸參考點(diǎn),步進(jìn)電機(jī)將按照預(yù)先定義好的位置尋找參考點(diǎn)。X軸、Y軸的尋零程序如圖5所示。Z軸亦同。
3.2自動控制方式一程序設(shè)計(jì)
自動控制方式一中要求在按下啟動按鈕后,機(jī)械手在三個軸上分別移動,最終移動到A區(qū)坐標(biāo)位置時吸取物料,之后將吸取的物料分別移動至B區(qū)要求的位置后放下。吸取物料和放置物料的位置需要事先通過機(jī)械手的移動來獲取準(zhǔn)確的數(shù)據(jù)。本設(shè)計(jì)中假設(shè)吸取物料的位置坐標(biāo)分別定位為14860,12866,18015,放置物料的坐標(biāo)分別定位為-15147,14181,15124。上述的位置都是相對于原點(diǎn)位置的絕對位置,將此數(shù)據(jù)編制在相應(yīng)的程序中,通過機(jī)械手從A區(qū)到B區(qū)的多次重復(fù)移動,直至將物料在B區(qū)擺放出要求的方形形狀為止。具體編寫程序的流程如圖6所示。
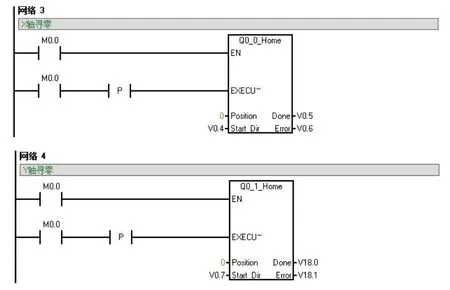
圖5 尋零程序
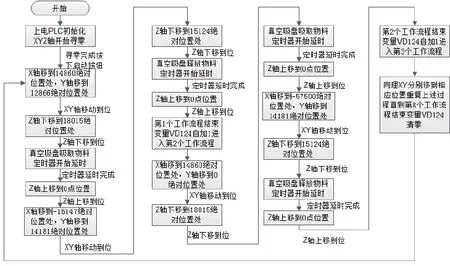
圖6 自動控制方式一流程圖
自動控制方式二要求將物料擺放出圓形形狀。其控制流程和自動控制方式一類似,皆是從A區(qū)將物料吸取放置到B區(qū),只是吸取物料和放置物料的位置坐標(biāo)不同而已。程序編寫時只需修改吸取和放置物料的坐標(biāo)位置和次數(shù)即可。
本程序結(jié)構(gòu)滿足了機(jī)械手運(yùn)行軌跡柔性化的工藝要求。當(dāng)機(jī)械手運(yùn)行軌跡發(fā)生變化時只需要改變自動控制方式下的程序即可實(shí)現(xiàn)。
4 結(jié)束語
本設(shè)計(jì)以工業(yè)自動化中機(jī)械手的控制要求為研究對象,設(shè)計(jì)了基于PLC的三軸機(jī)械手控制系統(tǒng)。通過對其運(yùn)動軌跡的分析實(shí)現(xiàn)機(jī)械手在不同控制方式下搬運(yùn)、抓取、移位等的動作,完成將物料從某區(qū)傳送到另一區(qū)域并將工件擺放出一定形狀的要求。程序編寫采用模塊化的設(shè)計(jì)思想,結(jié)構(gòu)清晰,便于檢查。本設(shè)計(jì)方案僅通過改變自動控制方式下運(yùn)行程序就可改變機(jī)械手隨工藝變化的的運(yùn)行軌跡,滿足了柔性化生產(chǎn)線高效率、高質(zhì)量的加工要求,具有很好的實(shí)際應(yīng)用價值,是制造領(lǐng)域的發(fā)展方向之一。
【】【】
[1] 李庭貴.基于PLC和步進(jìn)電機(jī)的立體倉庫存儲系統(tǒng)精確定位控制設(shè)計(jì)[J].制造業(yè)自動化,2011(21).
[2] 李勇成.基于PLC的步進(jìn)電機(jī)控制在工業(yè)機(jī)械手中的應(yīng)用[J].科技信息(科學(xué)教研),2008(18).
[3] 霍瑩.基于PLC的工廠自動化生產(chǎn)物流控制系統(tǒng)研究[D].長安大學(xué):機(jī)械電子工程,2010.
[4] 王彥軍,李增生.基于PLC的步進(jìn)電機(jī)控制[J].科學(xué)技術(shù)與工程, 2011(05).
[5] 郭俊宇,劉昆汶.基于PLC的步進(jìn)電機(jī)控制方法研究[J].科技情報(bào)開發(fā)與經(jīng)濟(jì),2011(13).
[6] 唐立平.氣動物流輸送及分揀系統(tǒng)的PLC控制系統(tǒng)設(shè)計(jì)[J].液壓與氣動,2010(07).
[7] 神顯豪.在線物料配送自動化倉庫的實(shí)體模型設(shè)計(jì)[D].陜西科技大學(xué):機(jī)械制造及其自動化,2010.
[8] 周炯亮,鄭安平,陳青華.基于PLC控制的自動化傳輸線的設(shè)計(jì)[J].儀表技術(shù),2011(06).
Design and implementation of control system for three-axis manipulator based on PLC
LIU Yan, ZOU Ping, GUAN Wen-juan
TH181;TP273
A
1009-0134(2016)07-0021-04
2016-03-06
劉燕(1964 -),女,山東濟(jì)寧人,教授,碩士,主要從事電氣工程及其自動化專業(yè)的教學(xué)與科研工作。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00