淺談北斗導航拖拉機自動駕駛系統在142 團的應用
2016-12-29 09:21:38蔣騰生產建設兵團第八師142團農業科新疆石河子832000
新疆農機化 2016年4期
蔣騰(生產建設兵團第八師142團農業科,新疆 石河子 832000)
淺談北斗導航拖拉機自動駕駛系統在142 團的應用
蔣騰
(生產建設兵團第八師142團農業科,新疆 石河子 832000)
文中介紹了北斗導航自動駕駛系統的主要組件。同時對國內外幾種比較典型的導航系統在田間播種作業時的接行端直、接行準確度進行了抽樣檢測。針對北斗導航自動導航駕駛系統使用中存在的問題提出了幾點改進建議。
導航系統;自動駕駛;檢測;應用
0 引言
2016年,新疆第八師142團本著“立足農機、發展農業”的原則。不斷提高農機科技含量,加快精準農業的推廣應用,為約翰迪爾854、約翰迪爾954、福田歐豹904等大中輪式型拖拉機安裝了北斗導航自動導航駕駛系統。142團場一共裝了103臺北斗導航自動駕駛系統,其中上海聯適88臺,上海華測6臺,美國約翰迪爾6臺,北京和眾思壯3臺。使用北斗導航裝置棉花鋪膜播種作業面積1.07萬hm2;青貯玉米播種作業面積:164 hm2。
1 導航的主要組件
該系統主要有衛星接收天線、車載接收機、控制器、液壓閥、角度傳感器以及車載終端等。
(1)衛星接收天線:衛星接收北斗信號兼容GPS、伽利略等衛星信號,結構堅固,防水、防塵,性能好。具有較強的抗振性,同時具有耐高低溫等特點。
(2)車載接收機:車載接收機是北斗高精度定位設備,接收北斗衛星信號,并通過電臺或者網絡等通訊方式獲取基站差分數據,從而輸出高精度坐標、航向、速度等定位信息。
(3)控制器:根據北斗高精度接收機與角度傳感器的實時信息以及車輛在規劃路線上所處的狀態進行實時的閉環計算并實時向液壓閥發送指令,使車輛始終準確的保持沿預定航線行駛。
(4)液壓閥:液壓閥是系統的液壓控制系統,其主要以液壓油為工作介質,進行能量轉換、傳遞和控制。采用合金材質,體積小巧,安裝方便,可靠性高,動作靈活,自動轉向控制的更為準確和及時。工作時沖擊和振動小,噪聲小,比方向盤模式控制精度高,反應快等特點。
(5)角度傳感器:實時感應車輛轉向角度并向控制器發送高精度轉向信息。
2 北斗導航自動駕駛系統的特點及優勢
(1)可以24小時全天候不間斷作業,提高機車作業面積,無論日夜不受天氣因素干擾都可以保證高精度作業。
(2)采用我國自主知識產權的北斗高精度定位系統。作業1 000m誤差在2.5 cm以內,減少作業中的重復面積,并能自動計算面積
(3)北斗導航與自動駕駛系統可極大減輕駕駛員的勞動強度,解放了駕駛員的雙手和眼睛,作業時有更多的精力與時間關注機車和農具的運行情況,更好地保證農機具的正常作業。減少駕駛員的工資支出,降低拖拉機車主的成本。
(4)可有效提高土地中的陽光和水分的利用率。使每棵植株均勻的分布,享有同等空間的陽光和水分,減少弱勢植株的比例。
3 實際作業情況
上海聯適北斗導航自動駕駛系統在第八師142團設立了7個基站,基站設備要求24小時全天候不間斷工作,單個基站的覆蓋最大半徑可達15 km,可以完全覆蓋整個團場的全部農田,滿足拖拉機駕駛員在田間作業的需求。同時駕駛員在不同的連隊作業時,可以切換到最近的基站來加強信號。
3.1檢測棉花播種端直和接行準確
我們針對棉花播種作業時的播行端直、接行準確進行了抽樣檢測。測量的方法是每個條田已播棉田兩頭進地20m處各選一個點,條田最中間選一個點,測量三個連接行的寬度,并且讓正在播種的拖拉機停車20分鐘,記錄北斗導航自動駕駛設備重新啟動的過程所需時間,觀察在起步行駛時是否有彎曲。檢測中我們遇到一些突發情況如基站斷電,而導致北斗導航自動駕駛系統無法使用。再次啟動接收信號連接的時間較長,且在啟動行駛的100 m內出現彎曲,所以在檢測過程中,我們著重對停車20分鐘,關閉導航設備再重新啟動進行測量。上海華測導航設備啟動需15分鐘且起步時需手動扶方向盤且接行處有5 cm的小彎(春播過后,上海華測公司進行了雙天線的改造,目前已經達到技術要求。);美國約翰迪爾導航設備啟動需2分鐘且起步時不需要手扶,接行處沒有無小彎;上海聯適導航設備啟動需2分鐘且起步時不需要手扶,接行處沒有無小彎;北京合眾思壯導航設備啟動需2分鐘且起步時不需要手扶,接行處沒有小彎。
3.2接行偏差距離檢測
我們分別在142團的10連、15連、19連、23連、25連、26連以及30連,現場對春播作業拖拉機進行抽樣檢測(要求接行的標準距離為66 cm)。每個品牌北斗導航自動駕駛系統抽三輛拖拉機,測繪完成后進行了接行距離的統計,結果如表1。通過檢測找出北斗導航設備在播種作業時接行不準確的原因。(1)安裝北斗導航自動駕駛系統的四驅拖拉機(例如約翰迪爾854、約翰迪爾904等。)明顯要比二驅拖拉機(例如約翰迪爾850、福田900等。)在作業時接行更加準確。(2)不同的品牌其自身的系統配置以及傳感器所能達到的精準度不同所以導致接行的上下偏差也各不相同。深松作業后的條田,拖拉機播種作業誤差較大。
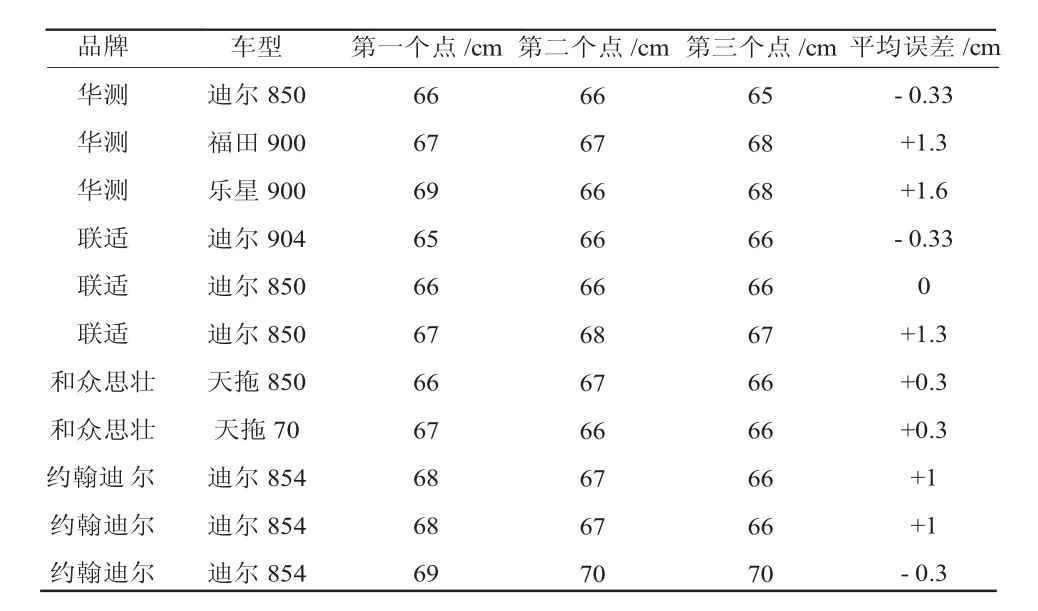
表1 北斗導航在棉花播種作業中接行偏差距離的測量
4 安裝北斗導航自動駕駛系統的一點經驗
(1)對安裝導航的拖拉機在不帶農具的情況下進行1 000 m測驗,在1 000 m內設三個點進行往返幾次行走,觀察三個點上的誤差。調整誤差到最小間距,達到北斗導航自動駕駛系統的規定范圍內。這樣做的好處是:拖拉機調整到位,連接農機具后誤差較大時,我們只需調整農機具,不用再考慮拖拉機的偏正問題。在調整拖拉機的同時對駕駛操作人員進行北斗導航自動駕駛系統的實際操作培訓,為今后駕駛操作人員作業打下了良好的基礎。
(2)將拖拉機懸掛上播種機后,在1 000 m內設三個點,操作方法同上。通過以上反復調試,駕駛操作人員在下地前,基本可以掌握北斗導航自動駕系統。
5 幾點改進建議
(1)加強北斗導航自動駕駛的售后服務,每年不少于兩次以上實際操作培訓,讓每個用戶能夠熟練的掌握好,使用好北斗導航自動駕駛系統。
(2)視頻字目太小,駕駛操作人員看不清A-B線符號,建議放大視頻字目。
(3)信號有不穩定的現象,特別是地勢較低和地邊樹木較多時信號較差,有時信號丟失,播行連續碎彎較多,前輪擺動頻繁,建議加高基站。
(4)北斗導航操作系統有待改進,缺少漢語拼音書寫功能,面積數不能存儲累計。在當前工作地塊可以看到面積,重啟或者轉地在建AB線后,原地塊面積消失,給駕駛員帶來不便。
(5)機車停車熄火斷開所有設備在20分鐘后重新啟動時,不能正常導航的、播行出現彎曲的,建議廠家更換設備。
(6)安裝了北斗導航設備拖拉機提高了駕駛員的舒適性,但降低了駕駛員的警惕性,有打盹的現象。建議安裝距地頭30m處報警裝置,起到提醒駕駛員的作用。
(7)每設AB線時,拖拉機要空跑一趟,增加了油耗。土地經過兩次碾壓車轍印較深,造成土地壓實,影響作物生長,建議研發一種手持式光感定點設備。
Brief dicussion of application of“Big Dipper”tractor automatic driving navigation system at 142th regiment
JIANG Teng
(Agricultural department of 142 regiment,8th division,Xinjiang production and construction corps,Shihezi832000,Xinjiang,China)
This text introduces the main parts of“Big Dipper”navigation automatic driving system.We carry out sampling in spection for accuracy among several typical navigation system at home and aboard,and rise several improvment suggestions aim at the problems that exist in use of“Big Dipper”tractor automatic driving navigation system.
Navigation system;Automatic driving;Inspection;Application
1007-7782(2016)04-0020-03
10.13620/j.cnki.issn1007-7782.2016.04.008
S219.1
B
2016-07-19
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:26:08
故事大王(2016年7期)2016-09-22 17:30:08
公民與法治(2016年4期)2016-05-17 04:09:26
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
兒童故事畫報(2013年3期)2013-06-24 05:40:30