膠輪+導軌式有軌電車動力走行部滾振試驗臺設計
2016-12-30 02:47:24徐存寶王雪梅倪文波
鐵道標準設計 2016年12期
徐存寶,王雪梅,倪文波
(西南交通大學機械工程學院,成都 610031)
?
膠輪+導軌式有軌電車動力走行部滾振試驗臺設計
徐存寶,王雪梅,倪文波
(西南交通大學機械工程學院,成都 610031)
分析膠輪+導軌式有軌電車動力走行部的導向機理、脫軌機理,介紹電車3種類型的動力走行部導向機構。為研究導軌電車的輪軌關系,對其動力走行部的脫軌機理展開試驗研究,設計動力走行部滾振試驗臺。試驗臺可以模擬電車空載和滿載條件,以及直線、曲線通過工況。通過測量導向輪的橫向力、垂向力和垂向位移3個參數,研究分析導軌電車導向、脫軌機理,并建立相關評價標準。試驗臺為導向機構的優化及電車運行安全的提升提供保障。
膠輪+導軌式有軌電車;滾動振動試驗臺;動力走行部;設計
隨著城市化的發展、人類環境保護意識的增強,以及對出行舒適性和便捷性要求的提高,現代有軌電車又重新得到了應用。現代有軌電車主要分為鋼輪鋼軌式有軌電車和膠輪+導軌式有軌電車兩種類型[1],其中膠輪+導軌式有軌電車采用膠輪驅動,只需要一根中央導軌進行導向,電車的重力由走行膠輪承載,因此導向輪對鋼軌路基的受力要求遠遠低于鋼輪鋼軌式有軌電車,大大降低了線路建設周期和成本。目前膠輪+導軌式有軌電車的主要生產廠家是法國的LOHR公司和加拿大的Bombardier公司[2]。世界首輛膠輪+導軌式有軌電車在2001年2月在法國南錫市(Nancy)投入運行后便得到了社會的密切關注。
動力走行部是膠輪+導軌式有軌電車最為關鍵的部件,其導向性能決定了電車的曲線通過性能與安全性能。動力走行部上的導向輪與導向軌接觸,導向輪在導向軌上不脫軌是電車安全運行的基本要求。膠輪+導軌式有軌電車脫軌機理與傳統輪軌形式的電車不同,目前尚無公開的關于膠輪+導軌式有軌電車脫軌機理的研究文獻,因此在對其展開研究的過程中,試驗研究必不可少。本文將通過分析其導向機理,對其試驗臺試驗技術展開研究。
1 膠輪+導軌式有軌電車動力走行部導向原理及導向機構的類型
膠輪+導軌式有軌電車動力走行部導向原理如圖1所示。電車運行時,走行部上的前導向輪鎖定滑塊鎖定前導向輪,后導向輪鎖定滑塊解鎖后導向輪。當電車需要轉向時,與線路曲率一致的導向軌通過與前導向輪輪緣之間的擠壓產生導向力,使前導向輪帶動轉向機構繞轉動中心轉動,轉向機構上的轉向桿控制動力走行部上的走行膠輪轉向,使電車沿導向軌設定的路線行駛。
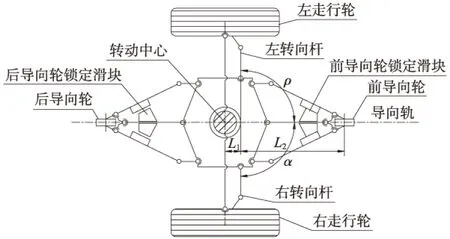
圖1 膠輪+導軌式有軌電車動力走行部導向機構原理
如何保證導向輪不脫離導向軌是電車導向的關鍵。因此世界上的膠輪+導軌式有軌電車的動力走行部都設計了獨特的導向機構,如圖2所示的分別是LOHR公司的Translohr型(a)和Bombardier公司的TVR型(b),以及中車四方車輛有限公司提出的一種帶有鉤形裝置保護的雙輪緣新型導向機構(c)。導向輪與導向軌的接觸方式是3種結構的主要差別。Translohr型有軌電車的導向機構使用了2個導向輪,且導向軌的截面與傳統導向軌不同,2個導向輪成V字形排布,在導向軌兩側完成對動力走行部的導向功能;TVR型導向輪與導向軌的接觸方式類似于傳統輪軌關系,導向輪通過加高的雙輪緣結構使其不易脫離導向軌;新型導向機構在TVR型導向機構的基礎上添加了鉤形保護裝置,鉤形保護裝置在導向輪跳離導向軌時通過鉤住導向軌軌頭阻止導向輪進一步跳離導向軌,從而提高動力走行部運行時的安全性能。
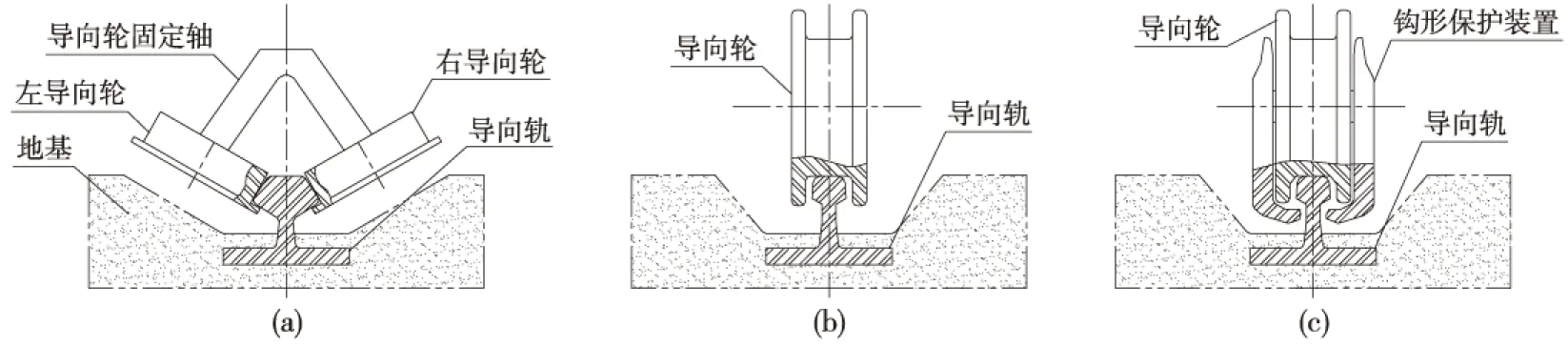
圖2 導向機構示意
2 導向輪脫軌機理分析
電車運行過程中,動力走行部上的導向輪與導向軌直接接觸,在導向軌上滾動運行。導向輪不脫離導向軌是導向機構設計的基本要求。目前尚無關于膠輪+導軌式有軌電車脫軌的標準,因此可借鑒軌道交通車輛關于脫軌的標準,判斷軌道車輛脫軌的主要參數是輪對的橫向力Q和垂向力P的比值。國際鐵路聯盟UIC規定用Q/P作為脫軌安全性標準,當Q/P≤1.2時認為車輛運行是安全的[3]。同樣導向輪的橫向力與垂向力的比值也可作為判斷獨軌電車脫軌的參數,導向輪的橫向力與垂向力的比值越大越容易脫軌。膠輪+導軌式有軌電車導向輪的垂向力主要由走行部上的壓緊彈簧提供,增大導向輪壓緊彈簧的壓緊力,對防止脫軌、增加導向機構的安全性是有利的,但是壓緊力過大會加快導向輪和導向軌之間的磨耗。文獻[4]提出了一種新的判斷車輛脫軌安全裕度的方法,也就是導向輪相對于導向軌的垂向位置變化,該理論指出當導向輪的抬升量超過輪緣高度時,即使很小的橫向擾動也會導致脫軌。基于上述的理論和假設,導向輪的橫向力、垂向力及其垂向位移是研究膠輪+導軌式有軌電車動力走行部的輪軌關系的重要參數。由于導向輪的結構、尺寸、受力情況與列車輪對不同,因此要通過試驗測試膠輪+導軌式有軌電車不脫軌時的最大橫向力與垂向力的比值(脫軌系數)、導向輪最大垂向抬升量。目前尚無測試以上指標的試驗臺,通過動力學建模仿真分析,在理想軌道上導向輪最大導向力≤5 kN,導向輪壓緊力為20 kN,若考慮軌道不平順等因素,此類型電車的脫軌系數應遠大于0.4,。另外,當導向輪抬升量小于導向輪輪緣高度20 mm時,認為電車沒有脫軌。
3 試驗臺方案
基于膠輪+導軌式有軌電車動力走行部導向機理以及導向輪脫軌機理的分析,與中車四方車輛有限公司一起設計了電車動力走行部試驗臺。試驗臺能夠對動力走行部的運行狀態進行模擬,包括不同速度、不同荷載、以及運行過程中不同軌道不平順的工況,尤其是電車曲線通過導向軌時的工況。整個試驗臺由機械系統、計算機測控系統兩部分組成。
3.1 試驗臺機械系統
膠輪+導軌式有軌電車動力走行部滾振試驗臺機械部分如圖3所示。試驗臺采用地坑式設計,地坑內是試驗臺主體,地上放置龍門架和被測試動力走行部。試驗臺主體結構從上到下依次是軌道輪安裝底座、轉動器、垂向激振液壓缸安裝支架和曲線導軌安裝底座。
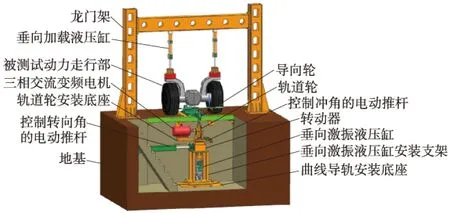
圖3 動力走行部滾振試驗臺
軌道輪安裝底座用于安裝軌道輪和三相交流變頻電機。為了模擬導向輪在導向軌上的運動,用與導向軌相同軌頭輪廓的軌道輪代替導向軌,通過導向輪在軌道輪上的轉動模擬在無限長導向軌上的滾動。三相交流變頻電機通過聯軸器與軌道輪連接在一起,可以模擬電車0~100 km/h的運行速度。
轉動器上端通過豎直放置的4個滑塊導軌與軌道輪安裝底座連接在一起,底端與垂向激振液壓缸安裝支架頂端固定在一起,不僅可以實現軌道輪安裝底座與垂向激振液壓缸安裝支架之間的相對轉動,而且可以實現兩者之間的垂向相對移動。地坑內的垂向激振液壓缸推動轉動器及以上部分作垂向振動,與軌道譜保持同樣的振幅和頻率,模擬電車運行時的軌道不平順。軌道輪安裝底座和垂向激振液壓缸安裝支架之間裝有電動推桿,通過控制軌道輪安裝底座和垂向激振液壓缸安裝支架之間的相對角度,實現導向輪與軌道輪之間的相對角度的控制,模擬電車轉向時導向輪和導向軌之間的沖角變化。
垂向激振液壓缸安裝支架通過曲線滑塊安裝在曲線導軌安裝底座上,實現試驗臺主體沿一定曲率的曲線導軌轉動。控制轉向角的電動推桿與垂向激振液壓缸安裝支架通過耳環式連接,可以推動垂向激振液壓缸安裝支架和軌道輪安裝底座一起沿曲線導軌轉動,模擬動力走行部轉向的工況。
曲線導軌安裝底座與地基之間通過調整墊鐵和地腳螺栓完成水平調整和固定。龍門架上裝有2個液壓缸,液壓缸通過假枕梁作用在被測試動力走行部上的空氣彈簧上,通過控制液壓缸的加載力可以模擬電車空載和滿載的工況。
3.2 試驗臺計算機測控系統
計算機測控系統由控制系統和數據采集系統兩部分組成。在控制系統中,上位機通過通信電纜把控制信號傳輸給伺服液壓系統控制器、電動推桿控制器、變頻器,從而完成對伺服液壓缸、電動推桿和三相交流變頻電機的控制。
數據采集系統完成對導向輪的垂向力、橫向力和垂向位移等信號的采集。導向輪的垂向位移、垂向力可以由位移傳感器、力傳感器測得,導向輪的橫向力一般很難直接測得,可通過在動力走行部上的轉向臂上貼應變片的方法換算得到,動力走行部轉向臂上測量得到的力與導向輪橫向力之間的關系如式(1)所示。采集到的信號經過信號調理器調理后由DAQ數據采集卡完成A/D轉換,之后傳輸給上位機。膠輪+導軌式有軌電車動力走行部滾振試驗臺測控方案如圖4所示。

圖4 膠輪+導軌式有軌電車動力走行部滾振試驗臺測控方案
式中F橫——導向輪橫向力,N;
F右——右轉向桿上的力,N;
F左——左轉向桿上的力,N;
α——導向輪與右轉向桿之間的夾角,rad;
ρ——導向輪與左轉向桿之間的夾角,rad;
L1——轉向桿與轉軸之間的距離,mm;
L2——轉向桿與導向輪之間的距離,mm。
4 試驗臺的主要參數及試驗項目介紹
由于膠輪+導軌式有軌電車動力走行部結構的特殊性,設計的滾振試驗臺要與被試驗的動力走行部相匹配。試驗臺的主要技術指標如表1所示。
試驗臺通過模擬運行時導向輪在線路激擾下的性能分析動力走行部的性能。對被測試動力走行部可以

表1 膠輪+導軌式有軌電車動力走行部滾振試驗臺的主要技術指標
完成的試驗包括:(1)0~100 km/h無沖角直線行駛性能測試;(2)0~100 km/h某一沖角工況下直線行駛性能測試;(3)某一速度工況下直線行駛最大沖角的測定;(4)無沖角不同速度工況下最大轉向角的測定;(5)某一沖角不同速度工況下最大轉向角的測定;(6)0~50 km/h無沖角不同轉向角工況下曲線通過性能測試;(7)0~50 km/h某一沖角不同轉向角工況下曲線通過性能測試。通過以上試驗及采集到的試驗數據,可以研究導向輪脫軌時的橫向力和垂向力的比值和導向輪垂向位移量之間的關系,從而為研究膠輪+導軌式有軌電車動力走行部脫軌機理提供試驗基礎。
5 結語
通過對膠輪+導軌式有軌電車動力走行部導向機理的分析,完成了動力走行部滾振試驗臺的方案設計。試驗臺可以模擬電車直線和曲線通過時的運行狀態,并能夠采集該狀態下動力走行部上導向輪的橫向力、垂向力和垂向位移等信息,分析其導向性能。試驗臺不僅為電車導向機構的優化提供了試驗條件,而且為今后設計膠輪+導軌式有軌電車整車試驗臺提供了理論和實踐基礎。
在試驗臺上進一步通過改變激振液壓缸的激振譜,可以反向研究電車的導向軌鋪設標準;通過更換電車走行膠輪與試驗臺之間的接觸材料,還可以研究不同路面材料與走行膠輪之間的磨耗關系。
[1] 薛美根.現代有軌電車主要特征與國內外發展研究[J].城市交通,2008,6(6):88-96.
[2] 任利惠,胡亮亮,侯件件,等.勞爾有軌電車導向特性[J].城市軌道交通研究,2013(4):53-58.
[3] 俞展猷,李富達,李谷.車輪脫軌及其評價[J].鐵道學報,1999,21(3):33-38.
[4] 翟婉明,陳果.據車輪抬升量評判車輛脫軌的方法與準則[J].鐵道學報,2001,23(2):17-26.
[5] Jun Xiang, Qing yuan Zeng, Ping Lou. Theory of random energy analysis for train derailment[J]. Journal of Central South University of Technology, 2003,10(2):134-137.
[6] 徐德新.定置式機車滾動試驗臺j微機控制系統的研究[D].成都:西南交通大學,2005.
[7] 李剛,李芾,文娟.中央導向膠輪輕軌車輛及其導向機理分析[J].國外鐵道車輛,2014,51(4):19-23.
[8] 黃麗湘,張衛華,馬啟文.機車車輛整車滾動振動試驗臺設計[J].鐵道車輛,2007,45(1):5-8.
[9] 陳良麒,張衛華,陳建政.機車車輛滾動振動試驗臺和試驗方法[J].西南交通大學學報,1997,32(2):208-213.
[10]張衛華.機車車輛運行動態模擬研究[M].成都:西南交通大學出版社,2006.
[11]曾慶元,向俊,周智輝,等.列車脫軌分析理論與應用[M].長沙:中南大學出版社,2006.
[12]胥燕軍,林紅松,王健,等.現代有軌電車軌道結構綜述[J].鐵道標準設計,2014,58(7):58-62.
[13]周萌,宮全美,王炳龍,等.路基不均勻沉降值對板式軌道動力響應的影響[J].鐵道標準設計,2010(10):1-4.
[14]巫偉軍.有軌電車系統特點及應用前景研究[J].鐵道標準設計,2007(8):122-125.
[15]倪文波,傅茂海.鐵道車輛轉向架性能參數測試臺[J].機床與液壓,2002(6):237-238.
Rolling Vibration Test-rig Designed for Power Running Gear of Rubber-tired Tram
XU Cun-bao, WANG Xue-mei, NI Wen-bo
(School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
The paper analyzes the steering mechanism and derailment mechanism of the power running gear of rubber-tired tram, and introduces three kinds of guiding structures of the power running gear. The rolling vibration test-rig is designed to understand the wheel-rail relationship of the steering mechanism. The rolling vibration test-rig is designed to simulate the no-load and full load conditions running on straight and curve lines. The working steering mechanism and derailment mechanism of the power running gear are studied and analyzed by the measurement of the guiding rollers’ lateral force, vertical force and vertical displacements, and relevant evaluation criteria are then established. This test-rig helps improving guiding structures and operational safety of the tram.
Rubber-tired tram; Rolling vibration test-rig; Power running gear; Design
2016-04-23;
2016-05-10
中車四方車輛有限公司科研課題(SFC2 015KF-JK-005)
徐存寶(1990—),男,碩士研究生,主要從事軌道車輛走行部及整車滾振試驗臺設計技術研究,E-mail:xucunbao904@163.com。
1004-2954(2016)12-0149-04
U482.1
A
10.13238/j.issn.1004-2954.2016.12.033