用線性調頻擴頻技術測距的室內質心定位方法
2017-01-05 01:40:32段翠翠
單片機與嵌入式系統應用 2016年12期
關鍵詞:信號
段翠翠
(濰坊科技學院,濰坊 262700)
?
用線性調頻擴頻技術測距的室內質心定位方法
段翠翠
(濰坊科技學院,濰坊 262700)
提出一種利用線性調頻擴頻技術進行通信并實現測距的方法,該測距方法能夠適用于復雜室內通信環境的無線傳感器網絡節點間的測距。在三邊測距定位的基礎上,提出了四邊測距定位算法,突破了三邊測距定位的局限性。為了進一步提高精度,采用了求質心和加權質心的方法。實驗結果表明,加權質心算法具有較高的精度,整個定位過程中,節點間無需額外的通信開銷,具有廣泛的實用性。
無線傳感器網絡;定位;CSS;質心算法
引 言
隨著計算機技術、微電子技術和無線通信等技術的進步,低功耗、多功能的無線傳感器網絡(wireless sensor network, WSN)得到了快速發展[1]。WSN是一種強大的信息獲取平臺,能完成多種監測和追蹤任務,而位置信息則成為重要的信息之一,節點的自身定位對WSN應用的有效性起著關鍵的作用[2]。目前,比較典型的定位方法有兩種:基于測距技術的定位方法和無需測距技術的定位方法[3]。其中,基于測距技術的測距方法主要有:①通過測量無線信號的場強特征值來實現定位,如基于RSSI[4]的定位技術;②利用無線信號在節點間的傳播時間等特征值進行定位,如TOA、TDOA定位技術;③通過測量無線信號的方向特征值進行定位,如AOA定位技術。無需測距技術的定位方法僅依靠網絡節點間的通信連通性即可實現,典型的算法主要有DVHOP[5]、凸規劃[6]和MDS-MAP[7]等。本文在充分研究三邊測距定位技術的基礎上,提出了一種基于CSS技術的四邊測距定位算法,并引入質心定位的思想[8],進一步提高了定位精度。
1 基于線性調頻擴頻技術測距
Chirp信號[9]是瞬時頻率隨時間線性變化的正弦波信號,通過對載波頻率進行調制以增加信號的發射帶寬,并在接收時實現脈沖壓縮,頻譜帶寬較大,具有良好的自相關性。用Chirp信號進行擴頻的通信方式被稱為線性調頻擴頻。基于線性調頻擴頻的測距過程如圖1所示[10]。

圖1 基于線性調頻擴頻的測距過程
標簽節點向錨節點發送測距數據包,當錨節點收到數據包后,自動回復應答信號,計算處理延遲,錨節點根據接收到的應答信號計算出信號傳播延遲,如果標簽節點沒有收到應答信號或者接收超時,就會重新初始化下一次測距過程。錨節點向標簽節點發送包含上一次處理延遲的數據包,根據接收到的標簽節點的應答信號計算出此次信號的傳播延遲,標簽節點計算此次處理延遲。錨節點再將包含傳播延遲的數據包發送給標簽節點。標簽節點利用4個時間值,調用距離計算公式d=c(T1-T2+T3-T4)/1,計算出兩節點間距離。標簽節點測得其與各錨節點之間的距離后,通過基站節點傳回給上位機,用于計算自身位置坐標。
2 算法數學模型
首先,介紹三邊測距定位法。如圖2所示,A、B、C三點為已知錨節點, 坐標分別為(xA, yA) , (xB, yB),(xC, yC);D為待測節點,坐標為(xD, yD)。若測得待測節點D到三個錨節點A、B、C的距離值分別為rA、rB、rC,由幾何關系可得:
(1)
(2)
(3)
由式(1)~(3)便可求得待測節點坐標。由于在實際環境中,無線通信信號傳播會發生反射、繞射和散射,引起測得信號到達時間偏大,因此測距會產生誤差,以致圖2中三個圓不會交于一點,實際情形如圖3所示。

圖2 三邊測距定位示意圖
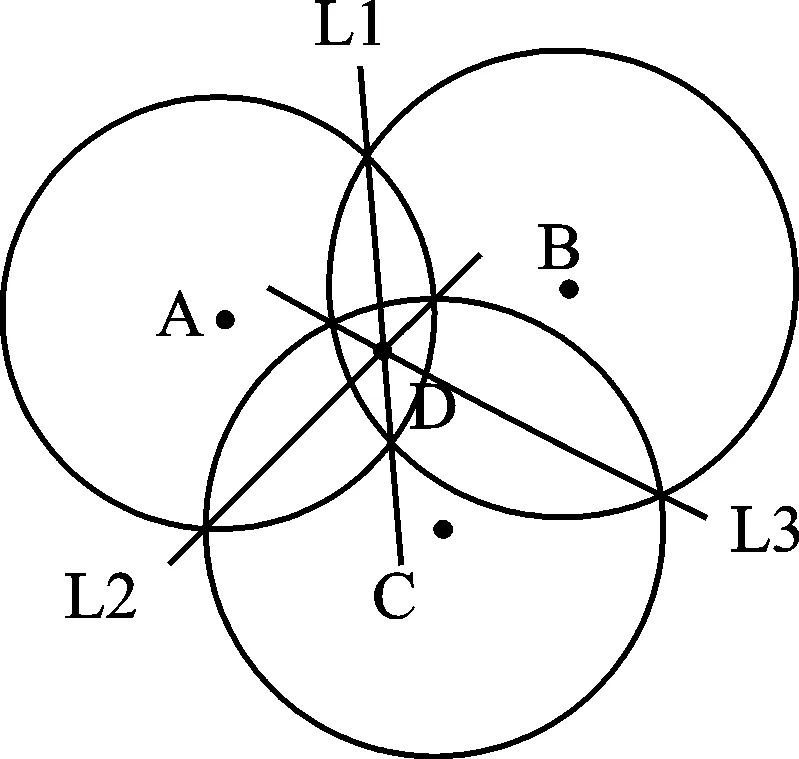
圖3 三邊測距定位實際情形
為了提高定位精度并避免以上問題,首先,采用對距離做平方差的方法,這樣可以減少測距誤差,測距誤差越小,越能提高定位精度。具體做法為式(1)~(3)兩兩相減,即可得圖3 中直線L1、L2、L3 :
三直線的交點即可以作為待測節點D的坐標估計。為了進一步提高定位精度,提出四邊測距定位算法, 即在三邊測距的基礎上,再添加一個錨節點參與定位,如圖4所示。根據圖4的情形,每次取三個錨節點(即三個圓)便可對待測節點進行一次坐標估計,每組取2條直線估算待測節點位置,這樣,圖4中便可以取4組圓產生待測節點D(xD,yD)的四次坐標估計為D1(xD1,yD1)、D2(xD2,yD2)、D3(xD3,yD3)、D4(xD4,yD4),對其求質心, 即可得節點D 的坐標為:
2(xB-xA)x+2(yB-yA)y=
(4)
2(xC-xA)x+2(yC-yA)y=
(5)
2(xC-xB)x+2(yC-yB)y=
(6)
(7)
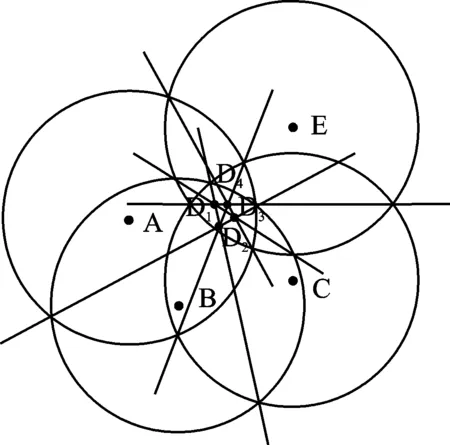
圖4 四邊測距定位示意圖
為了進一步提高定位精度,本文采用加權的思想,即在每組定位坐標中引入加權因子。加權因子為參與每次定位三個圓的半徑(待測節點到錨節點的距離)和的倒數,若參與定位的錨節點為A(xA,yA)、B(xB,yB)、C(xC,yC)、E(xE,yE),待測節點D(xD,yD)到各錨節點的距離分別為rA、rB、rC、rE,通過點B、C、E得到D點的坐標估計D1(xD1,yD1), 通過點A、B、C得到D點的坐標估計D2(xD2,yD2),通過點A、B、E得到D點的坐標估計D3(xD3,yD3),通過點A、C、E得到D點的坐標估計D4(xD4,yD4),則通過加權質心算法可得到D點的坐標為:
算法過程如下:
① 錨節點周期的發送信標信息,包括ID和自身位置信息;
② 標簽節點在接收到各個錨節點信息后,基于線性調頻擴頻技術分別測得自身與各個錨節點之間的距離;
③ 將測得的距離值從小到大排序,取前4個錨節點進行定位,若出現兩圓不相交的情形,則用后面的節點替換前一個節點,直到滿足定位要求(圖4所示)為止;
④ 取步驟③中前3個錨節點進行定位,得到圖2中待測節點的坐標估計;
⑤ 取步驟③中錨節點的其他3種組合,得到另外3種待測節點的坐標估計;
⑥ 對步驟④、⑤所得到的坐標估計通過質心算法,利用式(7)求得待測節點坐標;
⑦ 對步驟④、⑤所得到的坐標估計通過加權質心算法,利用式(8)求得待測節點坐標。
3 實驗分析
標簽節點和錨節點采用德國Nanotron公司的NanoLoc無線測距模塊,該模塊的核心部件包括NA5TR1(NanoLOC TRX Transceiver)芯片、Atmel 8位單片機ATmega128L、帶通濾波器、阻抗匹配單元。
NA5TR1是一款低功耗、高度集成化的無線通信和測距芯片,采用了Nanotron的寬帶線性擴頻調頻(CSS)全球專利技術,類似于國內先進的軍用線性調頻雷達。實驗中使用了4個錨節點,以錨節點A為坐標原點,以cm為單位,各錨節點的位置坐標分別為A(0,0),B(0,700),C(500,700),D(500,0)。
定位結果如表1所列,其中每組定位結果均為10次實驗結果的平均值。

表1 實驗結果與誤差
通過實驗可以看出,系統在該布置方案下的平均定位誤差僅為0.61 m,各樣本位置中結果最理想的點的定位誤差小于0.4 m,結果最差點的誤差未超過1 m,其他位置的誤差都穩定分布在該區間內。
結 語
本文提出一種利用線性調頻擴頻技術進行通信并實現無線傳感器網絡節點間測距的方法。該方法適用于復雜室內通信環境。同時,在三邊測距的基礎上,提出了四邊測距定位算法,整個算法完全采用幾何運算,具有非常好的快速性,對移動節點定位具有明顯優勢。

[1] 唐宏,謝靜,魯玉芳,等.無線傳感器網絡原理及應用[M].北京:人民郵電出版社,2010:29-31.
[2] 王利斌,何星龍.基于RFID技術的室內定位算法研究[J].信息通信.2014(10):30.
[3] Bahl P,Padm anabhan V N.RADAR: An in-building RF based user location and t racking system[C]//M Proc of the IEEE INFCOM 2000.Vol.2,T el Aviv:IEEE Computer and Communications Societies,2000: 775- 784.
[4] 譚勵.無線傳感器網絡理論與技術應用[M].北京:機械工業出版社,2011:71-79.
[5] Nicolescu D,Nath B.DV based positioning in Ad Hoc networks[J].Journal of Telecommunication Systems,2003,22(1/4) :267- 280.
[6] Doherty L,Pister K S J,Ghaoui L E.convex posit ion estimation in wireless sensor networks[C]//Proc of the IEEE INFOCOM 2001.Vol.3,Anchorage:IEEE Computer and Communications Societies,2001:1655- 1663.
[7] Shang Y,Ruml W,Zhang Y,et al.Localization from mere connectivity[C]//Proc of the 4th ACM Int'l Symp.On Mobile Ad Hoc Networking & Computing.Annapolis:ACM Press,2003:201- 212.
[8] 王殊.無線傳感器網絡的理論及應用[M].北京:北京航空航天大學出版社,2007:27-36.
[9] 楊清玉,于寧,王霄,等.無線傳感器網絡線性調頻擴頻測距方法研究[J].傳感器學報,2010,23(12):1761-1765.
[10] 段翠翠,王瑞榮,王建中,等.基于無線傳感器網絡的高危生產區人員定位系統[J].傳感技術學報,2012,25(11):1599-1602.
段翠翠(碩士),主要研究方向為無線傳感器網絡。
Indoor Centroid Algorithm Based on Ranging with Chirp Spread Spectrum Technique
Duan Cuicui
(Weifang University of Science and Technology,Weifang 262700,China)
In the paper,an approach which uses chirp spread spectrum technique to communicate and range is proposed.It can be used for ranging between wireless sensor nodes in the complex indoor communication environment.Based on the limitation of trilateration localization algorithm,the quadrilateral localization algorithm is proposed.In order to improve the location accuracy,the methods of computing centroid and weight centroid are used.The experiment results show that the weight centroid algorithm has a better accuracy.Since the algorithm is simple and no extra spending of communication is needed during locating,it can be used in many areas.
wireless sensor networks;location;CSS;centroid algorithm
TN401
A
?士然
2016-06-29)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
