基于AQWA的游艇耐波性數(shù)值模擬
2017-01-09 02:58:02呂鴻冠黃斯慧廣東海洋大學(xué)海洋工程學(xué)院廣東湛江524088
關(guān)鍵詞:環(huán)境
呂鴻冠, 黃 技, 黃斯慧(廣東海洋大學(xué) 海洋工程學(xué)院, 廣東 湛江 524088)
基于AQWA的游艇耐波性數(shù)值模擬
呂鴻冠, 黃 技, 黃斯慧
(廣東海洋大學(xué) 海洋工程學(xué)院, 廣東 湛江 524088)
舒適性是游艇設(shè)計(jì)者最關(guān)注的性能之一,而游艇在環(huán)境載荷作用下的橫搖、縱搖及垂蕩運(yùn)動(dòng)響應(yīng)直接影響到游艇的穩(wěn)定性和舒適性。對(duì)此,利用海洋工程水動(dòng)力計(jì)算軟件AQWA對(duì)一款小型游艇的相關(guān)數(shù)據(jù)進(jìn)行計(jì)算,得到環(huán)境載荷作用下游艇各自由度的運(yùn)動(dòng)響應(yīng)。分析結(jié)果表明,該游艇的運(yùn)動(dòng)響應(yīng)幅值穩(wěn)定在合理的范圍內(nèi),基本能滿足日常的使用要求。
游艇; 運(yùn)動(dòng)響應(yīng); 邊界元法; AQWA軟件
0 引 言
游艇以?shī)蕵?lè)、居家及商務(wù)為主要功能的定位,決定了設(shè)計(jì)游艇時(shí)對(duì)其耐波性的研究更傾向于保證其在風(fēng)浪流聯(lián)合作用下的穩(wěn)定性,即將其各自由度的運(yùn)動(dòng)響應(yīng)幅值控制在合理的范圍內(nèi)。目前對(duì)游艇舒適性的設(shè)計(jì)大多依靠工程經(jīng)驗(yàn)來(lái)判斷,或利用已有的經(jīng)驗(yàn)公式進(jìn)行計(jì)算。但是,游艇本身具有很強(qiáng)的定制性,即游艇的型線與傳統(tǒng)船舶的型線有很大區(qū)別,這導(dǎo)致經(jīng)驗(yàn)公式中很多系數(shù)的取值并不滿足游艇的實(shí)際情況,計(jì)算結(jié)果往往存在較大的誤差。
邊界元法(Boundary Element Method, BEM)是一種出現(xiàn)在有限元法(Finite Element Method, FEM)和有限體積法(Finite Volume Method, FVM)之后的數(shù)值計(jì)算方法,其相對(duì)其他算法的最大優(yōu)點(diǎn)是精度高、便于處理無(wú)限域問(wèn)題。目前邊界元法在海洋工程計(jì)算中的應(yīng)用已有一定的沉淀和發(fā)展,但大多集中在海洋平臺(tái)動(dòng)力響應(yīng)分析領(lǐng)域和艦船噪聲計(jì)算領(lǐng)域,對(duì)傳統(tǒng)船型及游艇的計(jì)算相對(duì)較少。胡毅等利用AQWA軟件對(duì)大型液化天然氣(Liquefied Natural Gas, LNG)船碼頭系泊進(jìn)行研究,得到特定條件下LNG 船系泊狀態(tài)的總體響應(yīng)。張明等利用AQWA軟件對(duì)打撈船工作過(guò)程中的穩(wěn)性進(jìn)行計(jì)算,對(duì)打撈過(guò)程中的安全性進(jìn)行評(píng)估。這里利用AQWA軟件對(duì)一款游艇進(jìn)行基于湛江南海沿海航區(qū)常規(guī)環(huán)境載荷作用的運(yùn)動(dòng)響應(yīng)數(shù)值模擬,為同類型游艇的計(jì)算提供參考和依據(jù)。
1 AQWA軟件理論簡(jiǎn)述
AQWA軟件基于規(guī)則波中的三維輻射/衍射理論,在線性流體理論下模擬各種浮式類和系泊類海洋結(jié)構(gòu)物,對(duì)不同環(huán)境載荷下的各類海洋結(jié)構(gòu)物進(jìn)行水動(dòng)力計(jì)算和分析。游艇的網(wǎng)格模型見(jiàn)圖1。

圖1 游艇的網(wǎng)格模型
網(wǎng)格劃分采用系統(tǒng)控制法,生成的網(wǎng)格總數(shù)量為13 509個(gè),其中水下部分的網(wǎng)格數(shù)量為7 585個(gè)。
游艇周圍一階波浪力的速度勢(shì)為
(1)

入射波的速度勢(shì)為
(2)
游艇受到的水壓力可由線性Bernoulli方程求出
(3)
將水壓力沿整個(gè)濕表面積求積分,可得到作用在游艇上的一階波浪力為
(4)
式(4)中:波浪力分為2項(xiàng),分別為入射力和繞射力。
通過(guò)求解式(5)即可求得游艇的響應(yīng)幅值算子RAOs(Response Amplitude Operator)
(5)
式(5)中:Ms為結(jié)構(gòu)質(zhì)量矩陣;Ma為水動(dòng)力附加質(zhì)量矩陣;C為系統(tǒng)線性阻尼矩陣;Ks為系統(tǒng)總剛度矩陣;F為系統(tǒng)所受的波浪力;X為響應(yīng)幅值算子;ω為入射波頻率。
2 環(huán)境載荷參數(shù)
該游艇的航區(qū)為湛江南海的沿海航區(qū),文獻(xiàn)[10]和文獻(xiàn)[11]中有對(duì)該航區(qū)風(fēng)浪的詳細(xì)統(tǒng)計(jì)分析。按照湛江南海沿海航區(qū)的實(shí)際情況和相關(guān)游艇規(guī)范,從文獻(xiàn)[10]和文獻(xiàn)[11]中選取風(fēng)浪參數(shù)(見(jiàn)表1)。

表1 南海沿海航區(qū)環(huán)境載荷
3 計(jì)算結(jié)果分析
游艇在環(huán)境載荷作用下的運(yùn)動(dòng)包括3種平動(dòng)(分別為橫蕩、縱蕩、垂蕩)及3種轉(zhuǎn)動(dòng)(分別為橫搖、縱搖、艏搖),其中橫搖、縱搖和垂蕩是最重要的運(yùn)動(dòng)參數(shù),關(guān)系到游艇的穩(wěn)定性和安全性,設(shè)計(jì)游艇時(shí)應(yīng)優(yōu)先考慮。計(jì)算時(shí)取3 600 s為1個(gè)計(jì)算歷程,時(shí)間步長(zhǎng)為0.1 s,總迭代次數(shù)為36 000次。表2為基于AQWA的游艇運(yùn)動(dòng)響應(yīng)數(shù)據(jù)。
3.1 游艇的運(yùn)動(dòng)響應(yīng)與環(huán)境載荷作用角的關(guān)系
游艇受不同方向環(huán)境載荷的作用,某些方位的載荷會(huì)使其運(yùn)動(dòng)響應(yīng)出現(xiàn)幅值。游艇的橫搖、縱搖及垂蕩運(yùn)動(dòng)響應(yīng)隨環(huán)境載荷作用角的變化規(guī)律見(jiàn)圖2~圖4。

表2 基于AQWA的游艇運(yùn)動(dòng)響應(yīng)數(shù)據(jù)
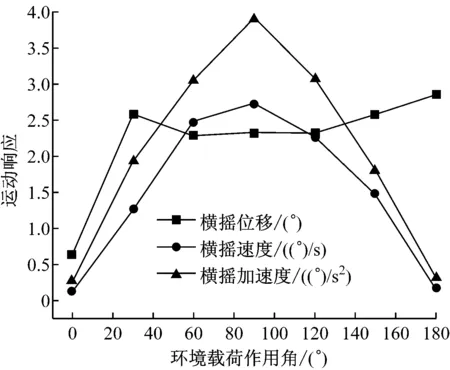
圖2 游艇橫搖響應(yīng)隨作用角的變化
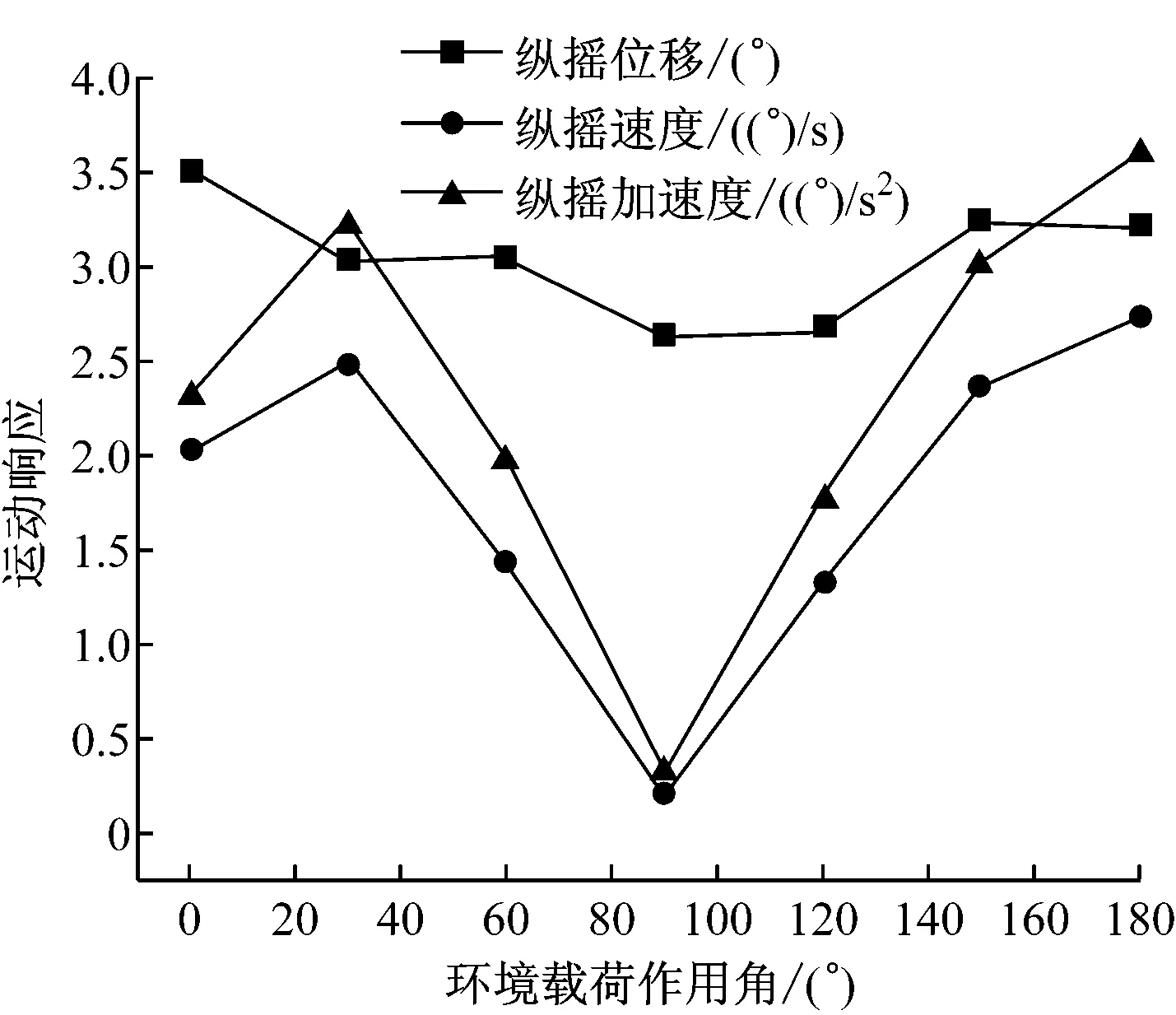
圖3 游艇縱搖響應(yīng)隨環(huán)境載荷作用角的變化

圖4 游艇垂蕩響應(yīng)隨環(huán)境載荷作用角的變化
由圖2和圖3可知,環(huán)境載荷作用角對(duì)游艇的橫搖和縱搖運(yùn)動(dòng)響應(yīng)影響很大:當(dāng)作用角為90°時(shí),橫搖運(yùn)動(dòng)響應(yīng)出現(xiàn)幅值;由圖3可知,當(dāng)作用角為0°和180°時(shí),縱搖運(yùn)動(dòng)響應(yīng)出現(xiàn)幅值。由圖4可知,環(huán)境載荷作用角對(duì)游艇的垂蕩運(yùn)動(dòng)響應(yīng)影響不大,即在不同環(huán)境載荷作用角下游艇的垂蕩運(yùn)動(dòng)基本穩(wěn)定在1個(gè)常量附近。綜合上述分析可知,游艇的運(yùn)動(dòng)響應(yīng)幅值應(yīng)出現(xiàn)在0°,90°,180°的環(huán)境載荷作用中,由于游艇具有對(duì)稱性,取0°和90°這2個(gè)方向計(jì)算游艇的運(yùn)動(dòng)響應(yīng)特性。
3.2 游艇在0°及90°環(huán)境載荷作用角下運(yùn)動(dòng)響應(yīng)的時(shí)歷曲線
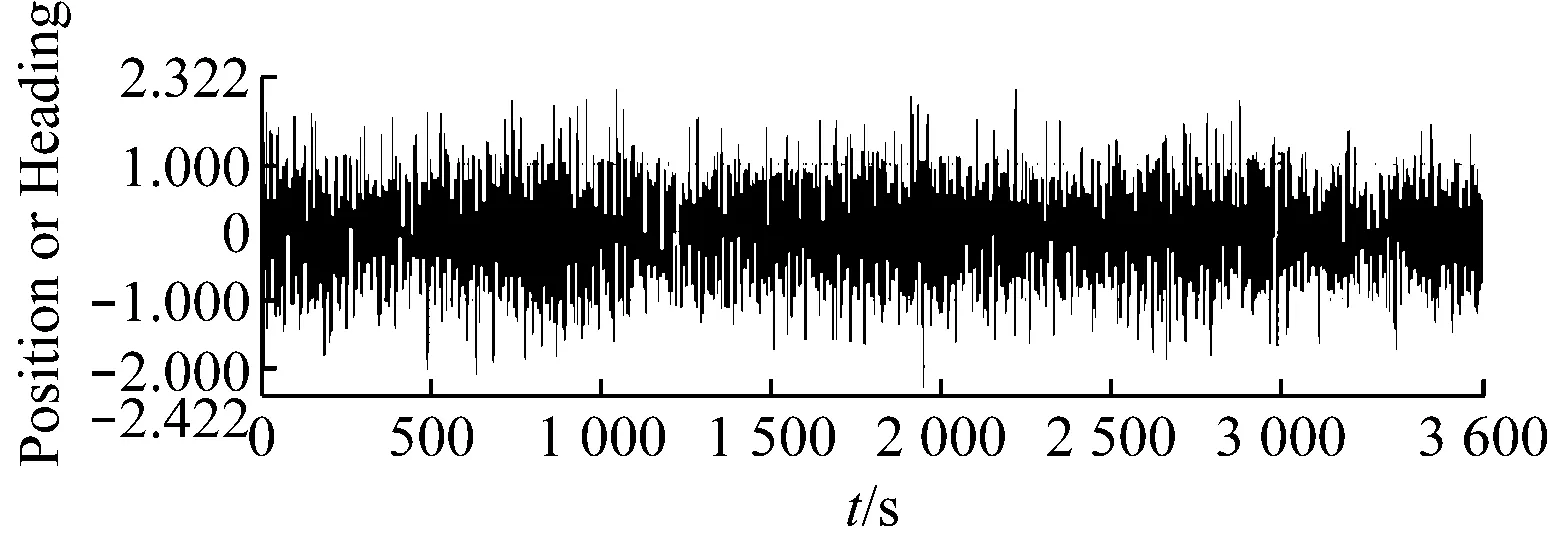
游艇在0°及90°環(huán)境載荷作用角下的運(yùn)動(dòng)響應(yīng)時(shí)間歷程曲線分別見(jiàn)圖5和圖6。
由圖5和圖6可知,游艇的運(yùn)動(dòng)響應(yīng)在計(jì)算時(shí)間內(nèi)繞初始點(diǎn)上下振蕩,響應(yīng)幅值的絕對(duì)值大小基本相等,且沒(méi)有出現(xiàn)巨幅的運(yùn)動(dòng)響應(yīng),說(shuō)明游艇的重心位置設(shè)計(jì)合理,沒(méi)有出現(xiàn)附加的橫傾力矩和縱傾力矩。

a) 橫搖響應(yīng)時(shí)間歷程

b) 縱搖響應(yīng)時(shí)間歷程

c) 垂蕩響應(yīng)時(shí)間歷程
a) 橫搖響應(yīng)時(shí)間歷程

b) 縱搖響應(yīng)時(shí)間歷程

c) 垂蕩響應(yīng)時(shí)間歷程
3.3 游艇運(yùn)動(dòng)響應(yīng)譜
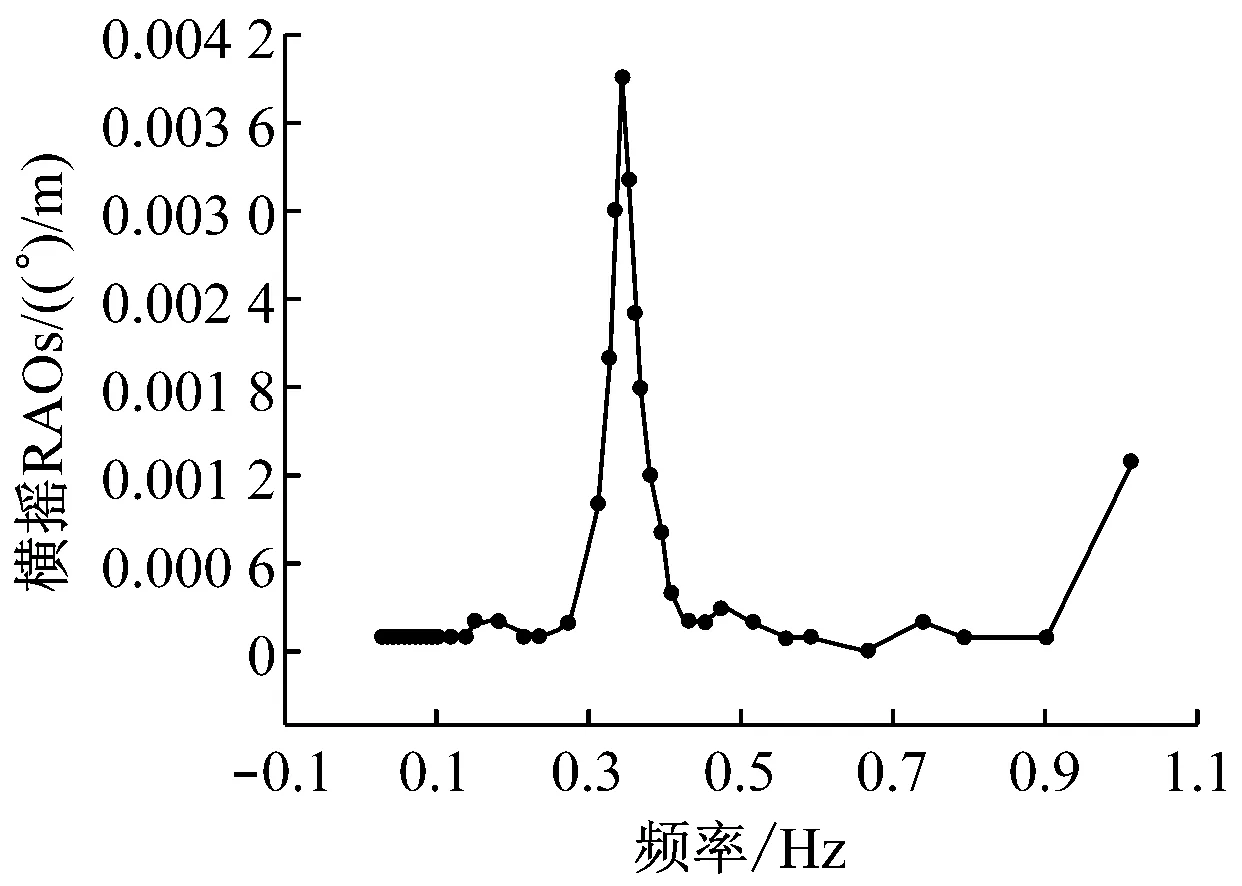
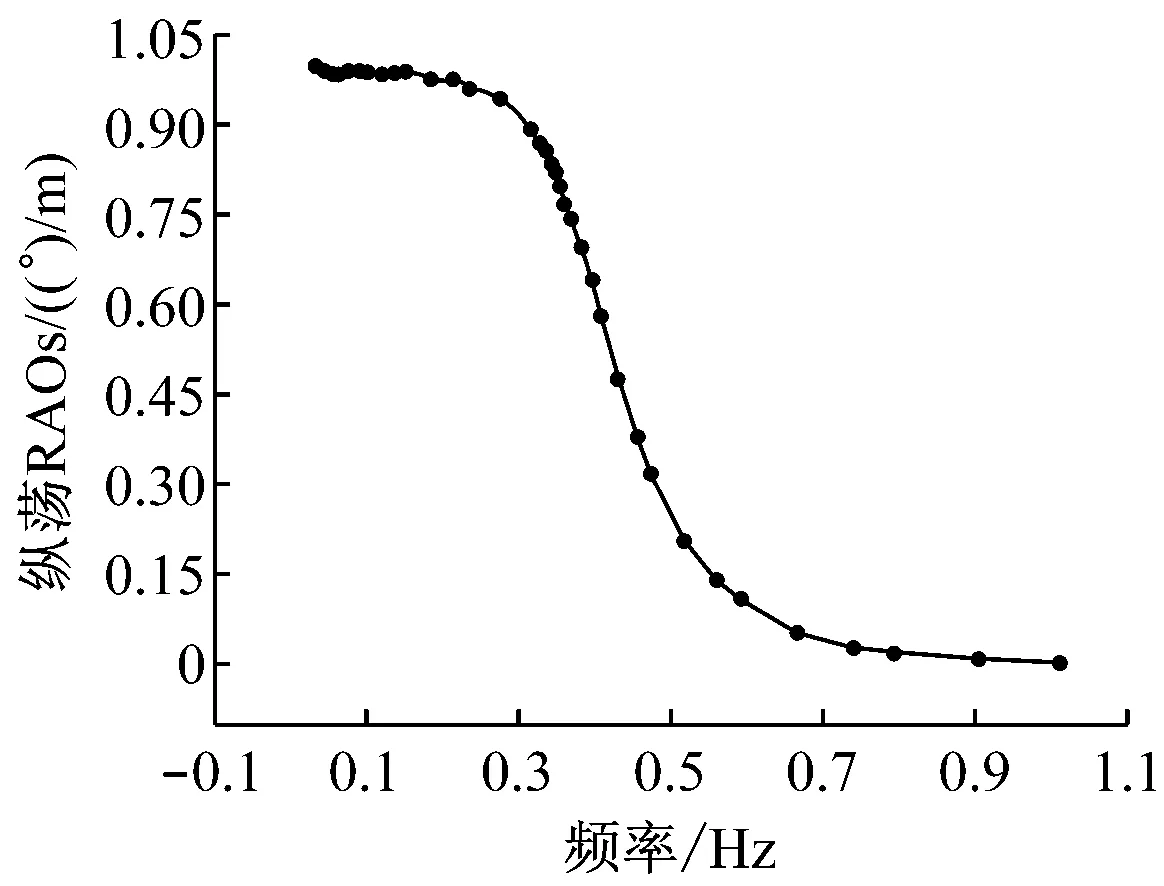
游艇的運(yùn)動(dòng)響應(yīng)幅值算子RAOs的計(jì)算結(jié)果見(jiàn)圖7和圖8。
a) 橫振RAOs

b) 縱搖RAOs
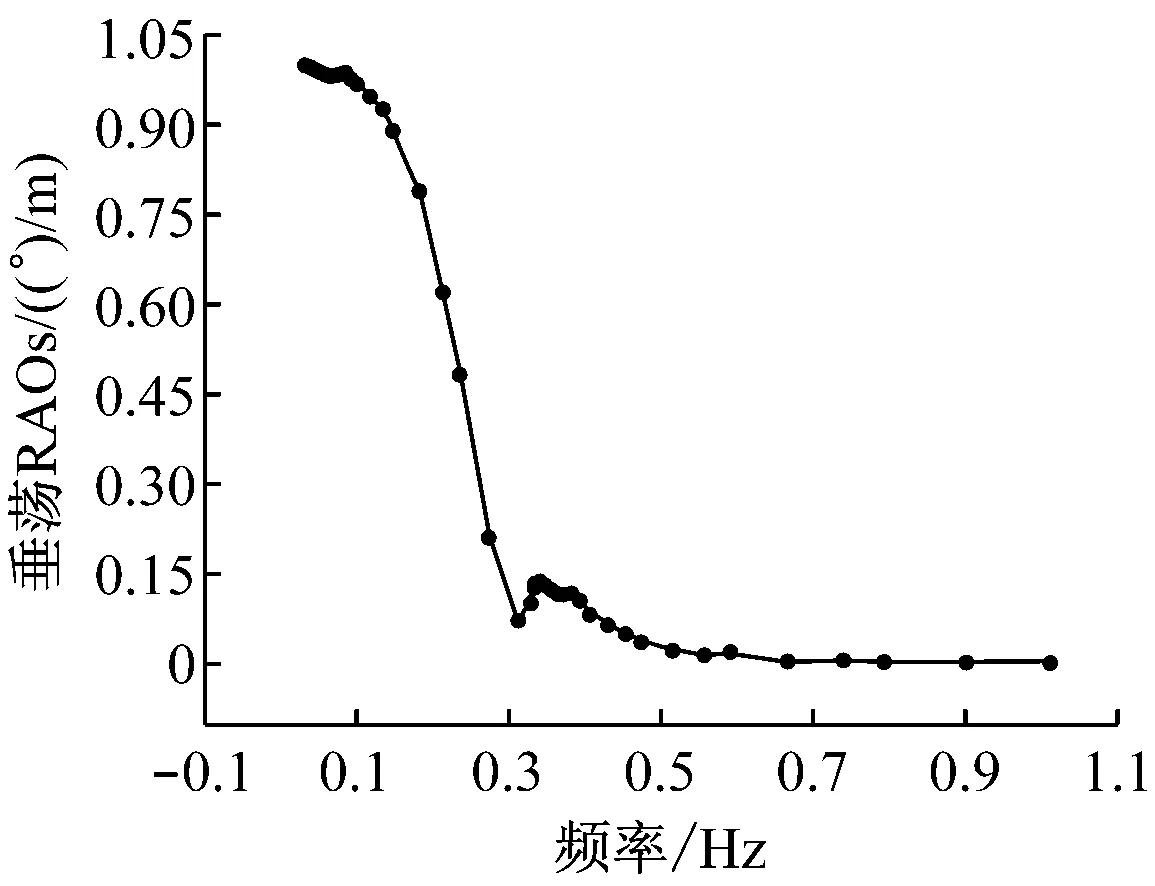
c) 垂蕩RAOs

a) 橫搖RAOs

b) 縱搖RAOs
c) 垂蕩RAOs
(1) 0°作用角時(shí),0.35 Hz區(qū)域的載荷頻率是游艇橫搖和縱搖響應(yīng)的共振頻率區(qū)間,波浪周期約為3 s,3~15 s的波浪周期屬于常見(jiàn)周期,設(shè)計(jì)時(shí)需重點(diǎn)考慮。游艇在該波浪頻率內(nèi)工作可能會(huì)出現(xiàn)較大的運(yùn)動(dòng)響應(yīng),響應(yīng)幅值相對(duì)其他波浪頻率高出1個(gè)數(shù)量級(jí)。但是,即使出現(xiàn)共振,其橫搖響應(yīng)幅值仍處于可接受范圍內(nèi)。這是因?yàn)?°作用角時(shí)環(huán)境載荷對(duì)橫搖響應(yīng)的影響很小,主要集中在縱搖響應(yīng)上。而縱搖響應(yīng)的幅值約為10°,即在共振頻率范圍內(nèi)工作會(huì)產(chǎn)生約10°的艏傾(艉傾),嚴(yán)重影響游艇的穩(wěn)定性,設(shè)計(jì)時(shí)需特別注意。
而對(duì)于垂蕩響應(yīng),其共振頻率向前推移,基本避開(kāi)了常見(jiàn)的波浪周期,設(shè)計(jì)時(shí)可減少對(duì)垂蕩響應(yīng)共振頻率的考慮。
(2) 90°作用角時(shí),共振頻率與0°作用角基本保持一致。但是,90°作用角的環(huán)境載荷對(duì)船體的穩(wěn)定性和安全性影響很大。由圖8可知,在共振頻率區(qū)間內(nèi)橫搖的響應(yīng)幅值非常大,而橫搖響應(yīng)過(guò)大是大部分船舶傾覆的主要原因。因此,設(shè)計(jì)游艇時(shí)應(yīng)重點(diǎn)考慮橫搖響應(yīng)的共振頻率,避免其在橫搖共振頻率區(qū)間進(jìn)行工作。
4 結(jié) 語(yǔ)
利用海洋工程水動(dòng)力計(jì)算軟件AQWA對(duì)一款游艇的日常工作狀態(tài)進(jìn)行數(shù)值模擬和數(shù)據(jù)分析,得到以下結(jié)論:
(1) 當(dāng)環(huán)境載荷的作用方向與游艇的中縱剖面和中橫剖面相垂直時(shí),游艇的運(yùn)動(dòng)響應(yīng)會(huì)出現(xiàn)幅值;
(2) 環(huán)境載荷的作用方向?qū)M搖和縱搖響應(yīng)有很大的影響,而對(duì)垂蕩響應(yīng)的影響很小;
(3) 游艇運(yùn)動(dòng)響應(yīng)的共振頻率接近于常見(jiàn)的波浪頻率,設(shè)計(jì)游艇時(shí)需考慮共振帶來(lái)的影響;
(4) 對(duì)于共振現(xiàn)象需特別注意橫搖響應(yīng)的共振頻率區(qū)間和橫搖響應(yīng)的幅值大小,最大限度地使游艇的共振頻率避開(kāi)常見(jiàn)的波浪頻率。
Numerical Simulation of Seakeeping Ability of a Yacht with AQWA
LYUHongguan,HUANGJi,HUANGSihui
(College of Ocean Engineering, Guangdong Ocean University, Zhanjiang 524088, China)
The comfort is the most important requirements for a yacht. Rolling motion, pitch motion and heave motion are directly responsible for the stability and comfort of a yacht. Motion responses with different degree of freedom of a yacht are simulated by AQWA, the software for ocean engineering. The results show that the motion response of the yacht is stable in a rational domain under regular environmental load, which proves that the yacht is comfortable in daily use.
yacht; motion response; boundary element method; AQWA
2016-08-28
廣東省大學(xué)生攀登計(jì)劃項(xiàng)目(Pdjh2016a0226); 廣東省青年創(chuàng)新人才類項(xiàng)目(2014KQNCX086);國(guó)家級(jí)大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃立項(xiàng)項(xiàng)目(CXXL2016019)
呂鴻冠(1994—),男,廣東揭陽(yáng)人,研究方向?yàn)榇芭c海洋結(jié)構(gòu)物設(shè)計(jì)。
1674-5949(2016)04-0022-04
U662.3
A
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語(yǔ)備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語(yǔ)·新策略(2019年9期)2019-10-17 01:51:34
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
中國(guó)生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(bào)(2017年2期)2017-04-20 08:44:31
中國(guó)環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國(guó)商論(2016年33期)2016-03-01 01:59:38