航天器在軌微振動(dòng)測(cè)量單元設(shè)計(jì)及地面標(biāo)定技術(shù)
2017-01-11 07:23:36楊金祿孫永進(jìn)趙振昊霍紅慶
航天器環(huán)境工程 2016年6期
楊金祿,孫永進(jìn),趙振昊,霍紅慶
(1.中國空間技術(shù)研究院 載人航天總體部,北京 100094;2.蘭州空間技術(shù)物理研究所,蘭州 730000)
航天器在軌微振動(dòng)測(cè)量單元設(shè)計(jì)及地面標(biāo)定技術(shù)
楊金祿1,孫永進(jìn)1,趙振昊1,霍紅慶2
(1.中國空間技術(shù)研究院 載人航天總體部,北京 100094;2.蘭州空間技術(shù)物理研究所,蘭州 730000)
針對(duì)航天器在軌微振動(dòng)環(huán)境測(cè)量,文章分析了微振動(dòng)的來源及其對(duì)空間科學(xué)實(shí)驗(yàn)和對(duì)地成像載荷的影響,設(shè)計(jì)了典型微振動(dòng)測(cè)量單元,提出了微振動(dòng)測(cè)量單元標(biāo)度因數(shù)和偏值的地面標(biāo)定方法,利用精測(cè)設(shè)備進(jìn)行了地面測(cè)試驗(yàn)證,結(jié)果表明微振動(dòng)測(cè)量單元各軸測(cè)量誤差小于5×10-3g0,驗(yàn)證了微振動(dòng)測(cè)量單元的設(shè)計(jì)和地面標(biāo)定方法的正確性。
航天器;微振動(dòng);測(cè)量;標(biāo)度因數(shù);偏值;地面標(biāo)定
0 引言
航天器在軌運(yùn)行中,大氣阻力、微重力梯度、潮汐力、太陽輻射壓、航天器姿軌控推力、艙段對(duì)接和分離振動(dòng)、航天員活動(dòng)、航天器內(nèi)部設(shè)備工作等因素,造成了在軌航天器的微振動(dòng)環(huán)境,將對(duì)航天器精密有效載荷的工作和科學(xué)實(shí)驗(yàn)產(chǎn)生一定的擾動(dòng)。根據(jù)擾動(dòng)特性,可以將航天器在軌微振動(dòng)分為準(zhǔn)穩(wěn)態(tài)加速度、瞬變加速度和振動(dòng)加速度[1]。因此,有必要研制一套航天器在軌微振動(dòng)測(cè)量單元,以實(shí)時(shí)獲取在軌微振動(dòng)數(shù)據(jù)。為了能夠準(zhǔn)確地測(cè)量在軌微振動(dòng),開展微振動(dòng)測(cè)量單元的標(biāo)定技術(shù)研究至關(guān)重要。
針對(duì)國際空間站在軌微振動(dòng)環(huán)境的測(cè)量,美國NASA研發(fā)了航天器在軌微振動(dòng)測(cè)量裝置,主要包括空間加速度測(cè)量系統(tǒng)(SAMS-II)和高級(jí)微重力加速度測(cè)量系統(tǒng)(AMAMS)。其中:SAMS-II采用了 QA-3100石英撓性加速度傳感器,其分辨率可達(dá)0.1 μg,可用于0.01~400 Hz頻率范圍的振動(dòng)加速度和瞬態(tài)加速度測(cè)量[2];AMAMS采用微電子機(jī)械(MEMS)加速度傳感器,其測(cè)量范圍更廣,包括準(zhǔn)穩(wěn)態(tài)、振動(dòng)和瞬變的加速度測(cè)量。針對(duì)高精度光學(xué)載荷,歐空局研發(fā)了微振動(dòng)測(cè)量系統(tǒng),其帶寬為0.5~1000 Hz[3]。我國從20世紀(jì)80年代中期開始致力于空間微振動(dòng)的研究,研制了相關(guān)產(chǎn)品,用于返回式衛(wèi)星的微振動(dòng)測(cè)量;之后又針對(duì)空間微重力科學(xué)實(shí)驗(yàn),研制了新型產(chǎn)品以用于載人飛船微振動(dòng)環(huán)境的實(shí)時(shí)監(jiān)測(cè)[4]。關(guān)于在軌微振動(dòng)測(cè)量系統(tǒng)的地面標(biāo)定方法,國內(nèi)外研究主要集中于加速度傳感器的標(biāo)定,而對(duì)于微振動(dòng)測(cè)量系統(tǒng)整體的標(biāo)定研究和公開報(bào)道較少。
本文分析航天器在軌微振動(dòng)來源及其對(duì)微重力科學(xué)實(shí)驗(yàn)載荷及高分辨率對(duì)地觀測(cè)成像載荷的影響,設(shè)計(jì)研制在軌微振動(dòng)測(cè)量單元,針對(duì)測(cè)量單元提出一種地面標(biāo)定方法并開展標(biāo)定評(píng)估。
1 航天器在軌微振動(dòng)來源及影響分析
1.1 航天器在軌微振動(dòng)來源
根據(jù)擾動(dòng)特性可以將航天器在軌微振動(dòng)分為以下3類[1]:
1)準(zhǔn)穩(wěn)態(tài)加速度,指頻率不大于0.01 Hz的微重力加速度,其量值一般不超過10-6g0量級(jí)(其中g(shù)0為地球重力加速度)。其來源主要是大氣阻力、微重力梯度、潮汐力、太陽輻射壓等的變化。
2)瞬變加速度,指發(fā)生瞬時(shí)跳變的微重力加速度,其量值一般大于 10-4g0量級(jí),持續(xù)時(shí)間為0.01~100 s。其來源主要包括姿軌控推力、艙段對(duì)接和分離振動(dòng)、航天器內(nèi)部設(shè)備工作、航天員活動(dòng)等。
3)振動(dòng)加速度,指時(shí)域變化表現(xiàn)為隨機(jī)漲落、衰減振蕩或穩(wěn)態(tài)正弦響應(yīng)的微重力加速度,其量值一般大于10-6g0量級(jí),頻率范圍為0.1~100 Hz。其來源主要包括儀器設(shè)備的振動(dòng)干擾以及航天器內(nèi)部擾動(dòng)所引起的結(jié)構(gòu)動(dòng)力學(xué)響應(yīng)。
上述3種航天器在軌微振動(dòng)中,準(zhǔn)穩(wěn)態(tài)加速度一般適用于大氣阻力、高空地球重力場(chǎng)、電推進(jìn)器推力等領(lǐng)域的評(píng)估研究,由于量值相比較小,因此對(duì)測(cè)量技術(shù)的要求很高,通常采用靜電懸浮加速度計(jì),并且需要進(jìn)行在軌標(biāo)校。由于瞬變加速度和振動(dòng)加速度的量值或頻率較高,相比準(zhǔn)穩(wěn)態(tài)加速度而言,對(duì)空間微重力科學(xué)實(shí)驗(yàn)和高分辨率對(duì)地成像載荷的影響較大,需要重點(diǎn)關(guān)注。
1.2 在軌微振動(dòng)對(duì)航天器任務(wù)的影響
1)空間微重力科學(xué)實(shí)驗(yàn)
微重力環(huán)境是寶貴的空間資源,科學(xué)家利用空間微重力環(huán)境設(shè)計(jì)了流體、材料、生命等多種科學(xué)實(shí)驗(yàn)載荷。航天器在軌微振動(dòng)水平則成為指導(dǎo)科學(xué)實(shí)驗(yàn)過程和評(píng)估科學(xué)實(shí)驗(yàn)結(jié)果的重要依據(jù)。以國際空間站為例,為了保障在軌微重力科學(xué)實(shí)驗(yàn)項(xiàng)目的順利開展,專門設(shè)計(jì)了飛行模式,空間站在該模式下2類加速度的限值分別為[5]:
①準(zhǔn)穩(wěn)態(tài)加速度在載荷設(shè)備的中心,其量值不超過10-6g0;在垂直于軌道加速度矢量方向上的分量不超過0.2×10-6g0。
②單獨(dú)瞬時(shí)干擾源引起的各軸瞬變加速度量值不超過10-3g0;多個(gè)瞬時(shí)干擾源綜合作用時(shí),各軸在任意10 s內(nèi)的加速度積分不超過10-5g0·s。
③國際空間站規(guī)定了艙體與國際標(biāo)準(zhǔn)有效載荷機(jī)柜(ISPR)機(jī)械接口間的振動(dòng)加速度限值:當(dāng)振動(dòng)頻率范圍在0.01~300 Hz之間時(shí),在任意100 s內(nèi)振動(dòng)加速度的方均根值的極限如圖1所示。
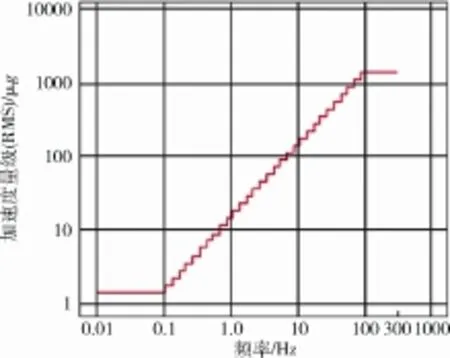
圖1 國際空間站與ISPR接口間的振動(dòng)加速度限值Fig.1 Limits of vibratory acceleration between International Space Station and ISPR
2)高分辨率對(duì)地成像載荷
航天器微振動(dòng)會(huì)造成成像載荷與目標(biāo)之間存在相對(duì)運(yùn)動(dòng),使圖像模糊不清,分辨率下降,甚至導(dǎo)致載荷無法成像。以Hymap成像光譜儀圖像為例,圖2(a)為無微振動(dòng)擾動(dòng)的原始成像;引入微振動(dòng)擾動(dòng)后,圖像明顯變模糊,如圖2(b)所示[6]。
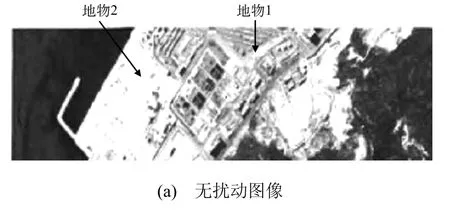
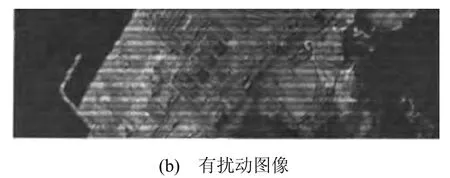
圖2 Hymap成像光譜儀的圖像數(shù)據(jù)Fig.2 Image from Hymap imaging spectrometer
目前成像載荷的指向精度一般要求小于1 μrad,部分載荷甚至要求達(dá)到0.05 μrad。干涉儀若受10-3g0以上的外部振動(dòng)干擾,則可能喪失成像能力[6]。
2 微振動(dòng)測(cè)量單元設(shè)計(jì)及測(cè)量模型
1)微振動(dòng)測(cè)量單元
微振動(dòng)測(cè)量單元一般由微振動(dòng)傳感器模塊、控制與數(shù)據(jù)處理模塊和地面數(shù)據(jù)處理模塊組成,如圖3所示。其中傳感器模塊選用技術(shù)較成熟的石英撓性加速度計(jì),并構(gòu)成三軸加速度傳感網(wǎng)絡(luò);控制與數(shù)據(jù)處理模塊用于對(duì)傳感器采集信號(hào)的模數(shù)轉(zhuǎn)換、數(shù)據(jù)初步處理以及與航天器平臺(tái)的通信,接收控制指令并發(fā)送微振動(dòng)數(shù)據(jù);所采集的微振動(dòng)數(shù)據(jù)經(jīng)控制與數(shù)據(jù)處理模塊及相關(guān)鏈路傳輸至地面,由地面數(shù)據(jù)處理模塊進(jìn)行計(jì)算處理,給出在軌微振動(dòng)水平。同時(shí),為了提高微振動(dòng)測(cè)量單元的通用性并減少對(duì)航天器平臺(tái)的約束,需完成傳感器模塊和控制與數(shù)據(jù)處理模塊集成設(shè)計(jì)。
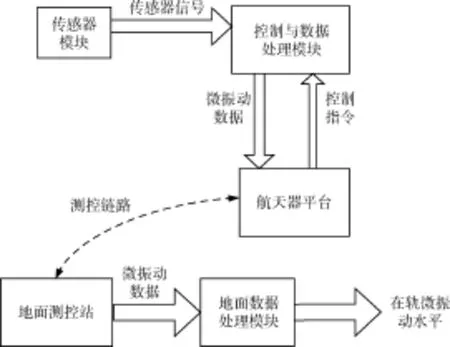
圖3 微振動(dòng)測(cè)量單元的組成及工作模式Fig.3 Configuration of the micro-vibration measurement unit and its working mode
微振動(dòng)測(cè)量單元的關(guān)鍵部件是石英撓性加速度計(jì),其性能直接影響測(cè)量單元整體指標(biāo)。石英撓性加速度計(jì)由機(jī)械表頭和混合集成電路共同組成,如圖4所示。加速度計(jì)內(nèi)部擺片用撓性梁支撐,以使加速度計(jì)在輸入軸方向上的剛度極小(幾乎為無約束的自由狀態(tài)),但在其他軸向的剛度極大。因此,當(dāng)加速度ai沿加速度計(jì)輸入軸方向作用,且擺片位置發(fā)生變化時(shí),則會(huì)導(dǎo)致差動(dòng)電容傳感器的電容值變化。此時(shí),伺服電路檢測(cè)到電容值變化并產(chǎn)生一個(gè)再平衡電流輸入給力矩器,所產(chǎn)生的力矩又會(huì)使擺片回到初始位置。對(duì)流過采樣電阻的電流進(jìn)行測(cè)量,便可以得到石英撓性加速度計(jì)輸入的加速度[7]。
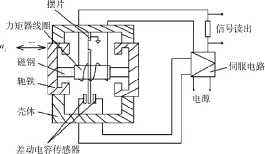
圖4 石英撓性加速度計(jì)原理Fig.4 Principle of quartz flexible accelerometer
2)測(cè)量模型
對(duì)于石英撓性加速度計(jì)來說,其加速度輸出模型可表示為

式中:A為加速度計(jì)測(cè)得的加速度,g;U為加速度計(jì)輸出電壓,V;K0為加速度計(jì)的偏值,g;K1為加速度計(jì)的標(biāo)度因數(shù),V/g;K2為加速度計(jì)的二階非線性系數(shù),g/g2;ai為加速度計(jì)的輸入加速度,g。
航天器在軌運(yùn)行過程中,加速度擾動(dòng)量值遠(yuǎn)小于石英撓性加速度計(jì)的量程,根據(jù)擾動(dòng)量值范圍可將加速度計(jì)測(cè)量范圍限制在 10-2g0~10-1g0,在此范圍內(nèi)石英撓性加速度計(jì)輸出模型可近似為線性關(guān)系,式(1)中的二階非線性系數(shù)可忽略。則加速度輸出模型為

由于微振動(dòng)測(cè)量單元對(duì)石英撓性加速度計(jì)輸出的電信號(hào)處理是模數(shù)轉(zhuǎn)換的線性處理,而測(cè)量目標(biāo)是獲取輸入加速度,所以微振動(dòng)測(cè)量單元的測(cè)量模型可表示為

式中:ai為微振動(dòng)測(cè)量單元的輸入加速度,是待測(cè)量值;u為微振動(dòng)測(cè)量單元輸出的傳感器信號(hào)數(shù)字量;k定義為微振動(dòng)測(cè)量單元的標(biāo)度因數(shù);k0定義為微振動(dòng)測(cè)量單元的偏值。
微振動(dòng)測(cè)量單元的標(biāo)度因數(shù)和偏值除了受石英撓性加速度計(jì)自身特性影響外,還與微振動(dòng)測(cè)量單元整體電路設(shè)計(jì)、安裝方式有關(guān)。影響標(biāo)度因數(shù)的因素主要包括控制與處理模塊中模擬電路處理增益及模數(shù)轉(zhuǎn)換增益。影響偏值的因素主要包括傳感器模塊坐標(biāo)系與測(cè)量單元本體坐標(biāo)系的安裝誤差及控制與處理模塊中模擬電路零偏。
3 微振動(dòng)測(cè)量單元地面標(biāo)定方法
為了獲取航天器在軌微振動(dòng)水平,將微振動(dòng)測(cè)量單元安裝于航天器內(nèi)部,并且其本體坐標(biāo)系應(yīng)與航天器艙體坐標(biāo)系保持平行。微振動(dòng)測(cè)量單元測(cè)量得到各軸加速度輸出值,再將輸出值輸入公式計(jì)算出測(cè)量單元的輸入加速度,即航天器各軸在軌微振動(dòng)水平。由式(3)可知,為了通過u計(jì)算出ai,需k(標(biāo)度因數(shù))和k0(偏值)已知即可,而k和k0僅與微振動(dòng)測(cè)量單元及內(nèi)部石英撓性加速度計(jì)自身特性有關(guān)。因此,需在地面對(duì)微振動(dòng)測(cè)量單元進(jìn)行標(biāo)定試驗(yàn),以獲取標(biāo)度因數(shù)和偏值。本文以典型微振動(dòng)測(cè)量單元(三軸測(cè)量、測(cè)量范圍±10-1g0)為例,設(shè)計(jì)一種實(shí)用的地面標(biāo)定方法。
該標(biāo)定方法是利用地球引力作用,通過改變微振動(dòng)測(cè)量單元的傾斜角度來獲得精確的輸入加速度,如圖5所示。
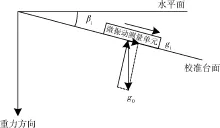
圖5 微振動(dòng)測(cè)量單元標(biāo)定示意Fig.5 Schematic diagram of calibration method of microvibration measurement unit
由圖5可得輸入加速度為

式中βi為水平面和校準(zhǔn)臺(tái)面的夾角。
將式(3)代入式(4),可得

式中ui為夾角βi時(shí)微振動(dòng)測(cè)量單元的數(shù)字量輸出。
由式(5)可知,為了求得k和k0,只要獲取 2個(gè)傾角即可求解方程組。但是,考慮到消除隨機(jī)誤差和評(píng)估測(cè)量模型線性度的需要,取微振動(dòng)測(cè)量單元測(cè)量范圍內(nèi)的多個(gè)傾角輸出結(jié)果進(jìn)行擬合,最終可得出微振動(dòng)測(cè)量單元的標(biāo)定因數(shù)和偏值。按照線性擬合的要求,一般至少取7個(gè)等距測(cè)點(diǎn),則由式(5)可得7組測(cè)點(diǎn)為
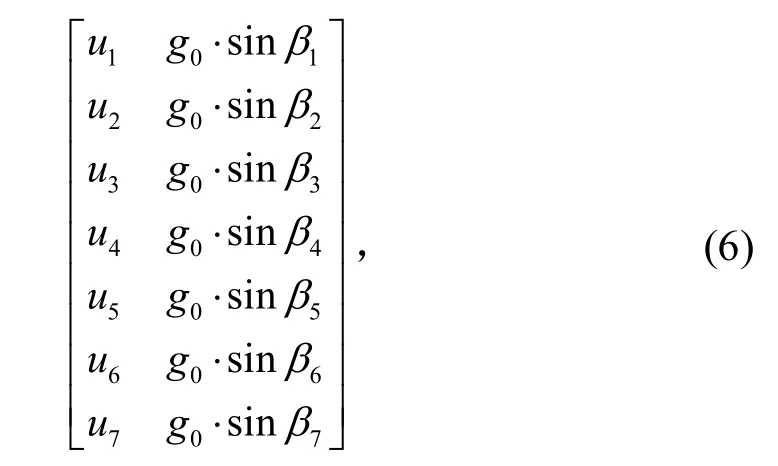
將式(6)進(jìn)行擬合,得出系數(shù)k′和k0′,則微振動(dòng)測(cè)量單元測(cè)量模型可寫為

標(biāo)定測(cè)試設(shè)備選用高精度分度轉(zhuǎn)臺(tái)。根據(jù)航天器在軌微振動(dòng)水平,微振動(dòng)測(cè)量單元的典型測(cè)量范圍約為±10-1g0,則根據(jù)式(4),可得最大傾角約為6°。為了能夠精確控制傾角,同時(shí)為保證標(biāo)定的準(zhǔn)確性,要求轉(zhuǎn)臺(tái)傾角誤差應(yīng)比微振動(dòng)測(cè)量單元測(cè)量精度高1個(gè)數(shù)量級(jí)。
微振動(dòng)測(cè)量單元用夾具固定在高精度分度轉(zhuǎn)臺(tái)上,為了驗(yàn)證標(biāo)定的正確性及消除安裝誤差及偏值的非對(duì)稱性,每軸采用擺態(tài)、門態(tài)、正和反共4種安裝方式進(jìn)行標(biāo)定。微振動(dòng)測(cè)量單元本體坐標(biāo)系如圖6所示。
圖6 微振動(dòng)測(cè)量單元本體坐標(biāo)系Fig.6 Coordinates of micro-vibration measurement unit
具體標(biāo)定方法如下:
1)調(diào)整高精度分度轉(zhuǎn)臺(tái)臺(tái)面成水平狀態(tài);
2)安裝微振動(dòng)測(cè)量單元使y軸與轉(zhuǎn)臺(tái)旋轉(zhuǎn)軸平行,z軸垂直向上;
3)連接微振動(dòng)測(cè)量單元供電、數(shù)據(jù)輸出電纜,做好數(shù)據(jù)采集準(zhǔn)備;
4)分別轉(zhuǎn)動(dòng)轉(zhuǎn)臺(tái)至-6°、-4°、-2°、0°、2°、4°、6°,每個(gè)測(cè)點(diǎn)穩(wěn)定后進(jìn)行一次數(shù)據(jù)采集,采集時(shí)間不少于30 s;
5)對(duì)每個(gè)測(cè)點(diǎn)30 s的采集數(shù)據(jù)進(jìn)行平均,按照式(6)進(jìn)行排列,則得出一組待擬合測(cè)點(diǎn)數(shù)據(jù);
6)對(duì)步驟 5)得出的測(cè)點(diǎn)數(shù)據(jù)進(jìn)行擬合,得出系數(shù)k1′和k01′;
7)轉(zhuǎn)動(dòng)轉(zhuǎn)臺(tái)180°使z軸垂直向下;
8)重復(fù)步驟4)~6),得出系數(shù)k2′和k02′;
9)調(diào)整微振動(dòng)測(cè)量單元安裝方式,使z軸與轉(zhuǎn)臺(tái)旋轉(zhuǎn)軸平行,y軸垂直向上,重復(fù)步驟4)~6),得出系數(shù)k3′和k03′;
10)轉(zhuǎn)動(dòng)轉(zhuǎn)臺(tái)180°使y軸垂直向下,重復(fù)步驟4)~6),得出系數(shù)k4′和k04′;
11)分別對(duì)上述4個(gè)標(biāo)定因數(shù)和偏值取平均,得出x軸最終的標(biāo)度因數(shù)和偏值;
12)按照上述步驟分別得出y軸和z軸的標(biāo)度因數(shù)和偏值。
本文設(shè)計(jì)的微振動(dòng)測(cè)量單元采用上述標(biāo)定方法進(jìn)行了標(biāo)定測(cè)試,結(jié)果如表1所示,可見每種安裝方式下擬合線性度均超過 0.999 9,擺態(tài)和門態(tài)一致性好,驗(yàn)證了標(biāo)定方法的正確性。
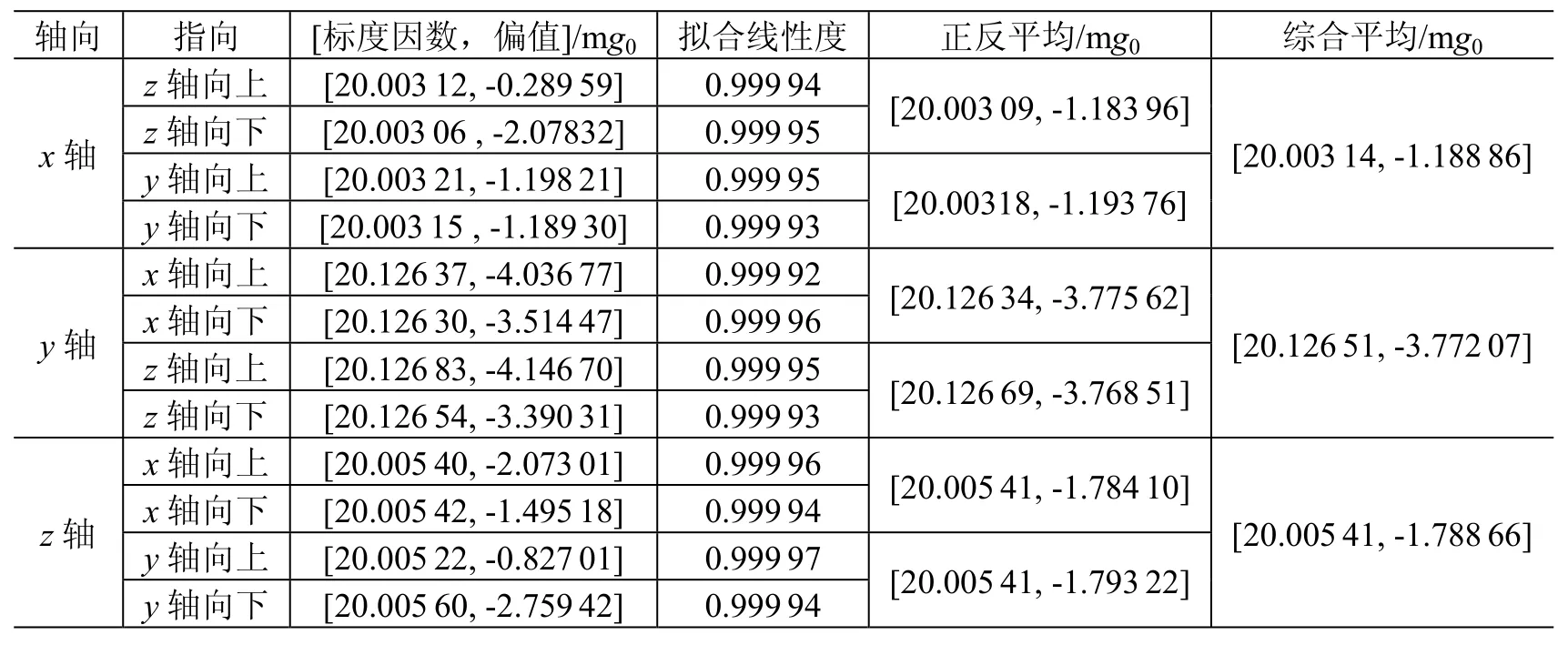
表1 某型號(hào)微振動(dòng)測(cè)量單元標(biāo)定結(jié)果Table 1 Testing results of the calibration for a micro-vibration measurement unit
4 測(cè)試驗(yàn)證
為進(jìn)一步驗(yàn)證微振動(dòng)測(cè)量單元和地面標(biāo)定方法的設(shè)計(jì),對(duì)微振動(dòng)測(cè)量單元進(jìn)行地面測(cè)試。
1)基本原理
微振動(dòng)測(cè)量單元可感知三軸微重力水平,由于地球重力加速度的存在,微振動(dòng)測(cè)量單元在地面可對(duì)重力加速度在三軸的重力分量進(jìn)行測(cè)量,得出微重力測(cè)量值。同時(shí),利用精測(cè)設(shè)備對(duì)微振動(dòng)測(cè)量單元坐標(biāo)系與大地坐標(biāo)系之關(guān)系進(jìn)行精測(cè),可計(jì)算出微重力理論值。將測(cè)量值和理論值進(jìn)行比對(duì),即可對(duì)微振動(dòng)測(cè)量單元和地面標(biāo)定方法進(jìn)行驗(yàn)證。
2)驗(yàn)證方案
由于地面重力加速度遠(yuǎn)大于微振動(dòng)測(cè)量單元測(cè)量范圍,為防止測(cè)量值出現(xiàn)飽和,采用2種放置方法,即z軸向上、xy平面水平放置和y軸向上、xz平面水平放置。為了獲得微振動(dòng)測(cè)量單元與大地坐標(biāo)系的關(guān)系,在微振動(dòng)測(cè)量單元側(cè)壁安裝立方鏡,如圖7所示。利用光學(xué)經(jīng)緯儀精測(cè)得到立方鏡與大地坐標(biāo)系之間的關(guān)系,進(jìn)而得出微振動(dòng)測(cè)量單元與大地坐標(biāo)系之間的關(guān)系。為了減小測(cè)量誤差,選用經(jīng)緯儀測(cè)量精度為40″,此誤差對(duì)各軸的微振動(dòng)的影響約為2×10-4g0。具體驗(yàn)證方法如下:
①將微振動(dòng)測(cè)量單元z軸向上、xy平面平置,放置穩(wěn)定后利用上節(jié)的標(biāo)定結(jié)果得出x軸和y軸的測(cè)量值,而z軸反向飽和。利用光學(xué)經(jīng)緯儀測(cè)得的精測(cè)數(shù)據(jù),計(jì)算得出x軸和y軸的微重力理論值。
②將微振動(dòng)測(cè)量單元y軸向上、xz平面平置,放置穩(wěn)定后利用上節(jié)的標(biāo)定結(jié)果得出x軸和z軸的測(cè)量值,而y軸反向飽和。利用光學(xué)經(jīng)緯儀測(cè)得的精測(cè)數(shù)據(jù),計(jì)算得出x軸和z軸的微重力理論值。
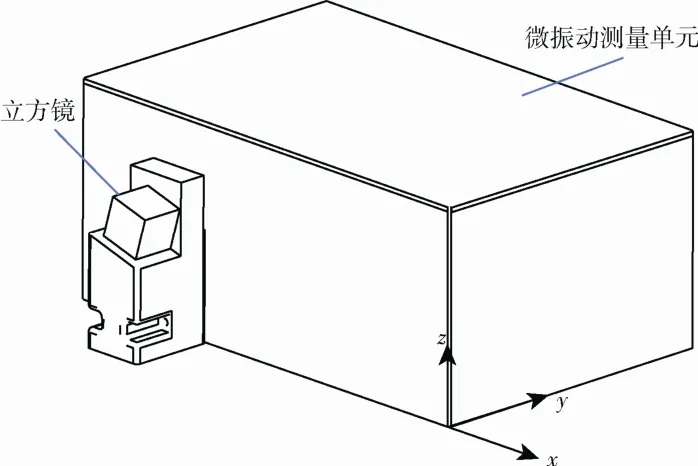
圖7 微振動(dòng)測(cè)量單元與立方鏡位置圖Fig.7 Position of micro-vibration measurement unit and cubic mirror
3)驗(yàn)證結(jié)果
從表2中的測(cè)量值與理論值比對(duì)結(jié)果可看出,各軸測(cè)量誤差小于5×10-3g0,這驗(yàn)證了微振動(dòng)測(cè)量單元設(shè)計(jì)和地面標(biāo)定方法的正確性。
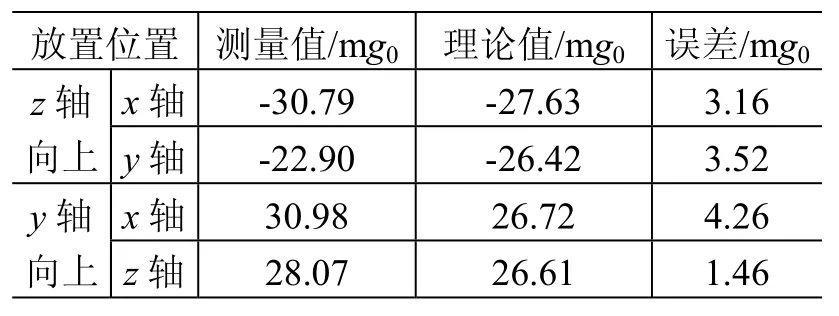
表2 某型號(hào)微振動(dòng)測(cè)量單元驗(yàn)證測(cè)試結(jié)果Table 2 Verification testing results of the calibration for a micro-vibration measurement unit
5 結(jié)束語
航天器在軌微振動(dòng)不可避免,其大小直接影響空間科學(xué)實(shí)驗(yàn)效果評(píng)價(jià)及對(duì)地成像載荷的分辨率。為測(cè)量航天器在軌微振動(dòng)水平,設(shè)計(jì)了典型微振動(dòng)測(cè)量單元,并提出測(cè)量單元的地面標(biāo)定方法。通過測(cè)試結(jié)果驗(yàn)證,該標(biāo)定方法能夠準(zhǔn)確獲取標(biāo)度因數(shù)和偏值,具有較高應(yīng)用前景和工程價(jià)值。
(
)
[1]趙偉.航天器微振動(dòng)環(huán)境分析與測(cè)量技術(shù)發(fā)展[J].航天器環(huán)境工程, 2006, 23(4): 210-214 ZHAO W.Analysis on micro-vibration environment of spacecraft and measurement technology[J].Spacecraft Environment Engineering, 2006, 23(4): 210-214
[2]JULES K, LIN P P, WEISS D S.Monitoring the microgravity environment quality on-board the International Space Station using soft computing techniques[R].[2016-04-22].http://www.ntrs.nasa.gov
[3]SICKER R J, THOMAS J.Advanced microgravity acceleration measurement systems(AMAMS) being developed[R].[2016-04-22].http://www.ntrs.nasa.gov
[4]薛大同, 雷軍剛, 程玉峰, 等.“神舟”號(hào)飛船的微重力測(cè)量[J].物理, 2004, 33(5): 355-356 XUE D T, LEI J G, CHENG Y F, et al.Microgravity measurement of spaceships “Shenzhou”[J].Physics, 2004, 33(5): 355-356
[5]楊彪, 胡添元.空間站微重力環(huán)境研究與分析[J].載人航天, 2014, 20(2): 179-180 YANG B, HU T Y.Study and analysis of microgravity environment onboard manned space station[J].Manned Spaceflight, 2014, 20(2): 179-180
[6]王曉燕, 唐義, 唐秋艷, 等.衛(wèi)星平臺(tái)振動(dòng)對(duì)色散型光譜儀光譜成像質(zhì)量的影響分析[J].光譜學(xué)與光譜分析, 2011, 31(12): 3408-3409 WANG X Y, TANG Y, TANG Q Y, et al.Analysis of influence of satellite platform vibration on spectral imaging quality of dispersive imaging spectrometer[J].Spectroscopy and Spectral Analysis, 2011, 31(12): 3408-3409
[7]王珂.石英撓性加速度計(jì)偏值和標(biāo)度因數(shù)穩(wěn)定性研究[D].哈爾濱: 哈爾濱工程大學(xué), 2012: 5-9
[8]薛大同.靜電懸浮加速度計(jì)的地面重力傾角標(biāo)定方法[J].宇航學(xué)報(bào), 2011, 32(3): 689-693 XUE D T.On-ground calibration methods of electrostatically suspended accelerometers with gravity inclination[J].Journal of Astronautics, 2011, 32(3): 689-693
[9]王澤宇, 鄒元杰, 焦安超, 等.某遙感衛(wèi)星平臺(tái)的微振動(dòng)試驗(yàn)研究[J].航天器環(huán)境工程, 2015, 32(3): 278-284 WANG Z Y, ZOU Y J, JIAO A C, et al.The jitter measurement and analysis for a remote sensing satellite platform[J].Spacecraft Environment Engineering, 2015, 32(3): 278-284
(編輯:許京媛)
Design of on-orbit micro-vibration measurement unit and ground calibration method
YANG Jinlu1, SUN Yongjin1, ZHAO Zhenhao1, HUO Hongqing2
(1.Institute of Manned Space System Engineering, China Academy of Space Technology, Beijing 100094, China; 2.Lanzhou Institute of Space Technology Physics, Lanzhou 730000, China)
For the on-board micro-vibration of a spacecraft, the disturbance source and the micro-vibration effect on the space scientific experimental instruments and the earth-imaging payloads are analyzed.A typical configuration of the micro-vibration measurement unit is designed.A method of on-ground calibration for the scale factor and the offset value is proposed and verified by accurate alignment tests.The testing result shows that the measurement error in each axis is less than 5×10-3g0and the design and the calibration method are feasible.
spacecraft; micro-vibration measurement; scale factor; offset value; ground calibration
V441
:A
:1673-1379(2016)06-0680-06
10.3969/j.issn.1673-1379.2016.06.020
楊金祿(1981—),男,博士學(xué)位,主要從事載人航天器空間技術(shù)試驗(yàn)技術(shù)研究。E-mail: yangjinluy2k@sina.com。
2016-05-23;
:2016-11-24
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21