道路養護車上料機構仿真研究
2017-01-13 05:07:23王金剛于作鑫甄冬趙祥
筑路機械與施工機械化 2016年12期
王金剛于作鑫甄冬趙祥

文章編號:1000033X(2016)12010604
收稿日期:20160519
基金項目:天津市自然科學基金(14JCYBJC42100)
摘要:在養護車上料機構設計階段對其進行運動仿真,利用ADAMS/Cable建立了道路養護車上料機構的動力學模型。通過對工作部件的運動進行約束,解決了ADAMS中多體接觸時仿真容易失敗的問題,順利得到機構工作部件的位移、速度、加速度和繩索受力的數據,及其危險工況的發生時間,為進一步分析優化該機構的工作特性提供了基礎,并且能提高上料機構的設計效率。
關鍵詞:道路養護車;上料機構; ADAMS;多體接觸
中圖分類號:U415.52文獻標志碼:B
Research on Simulation of Loading Mechanism on Road Maintenance Vehicle
WANG Jingang1, YU Zuoxin1, ZHEN Dong1, ZHAO Xiang2
(1. School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130,China;
2. Tianjin Fire Research Institute of MPS, Tianjin 300381, China)
Abstract: During the design stage of the loading mechanism, the motion simulation was carried out, and a kinetic model of cable lifting was proposed based on ADAMS/Cable. The motion trajectory of the working parts were analyzed in the process of simulation, verifying the structural rationality of the mechanism. The simulation failure of multibody contact in ADAMS was solved by the constraints of the working parts movement. The displacement, speed, acceleration and cable force of the working parts were attained, which provided the basis for analyzing the work characteristics of the mechanism and improved the efficiency of loading mechanism design.
Key words: road maintenance vehicle; loading mechanism; ADAMS; multibody contact
0引言
瀝青道路養護車可對瀝青路面出現的坑槽、網紋、裂縫、油包等進行處理,以路面坑槽修補為主要作業內容[16]。
養護車上料機構的作用是將瀝青原料從車輛底部提升到料箱的入料口處。上料機構在開始工作和突然結束工作時容易出現振動,尤其當提升機裝載物料較多時,物料容易因振動散落丟失,造成浪費。振動沖擊還會使機構的繩索產生疲勞,加大機構中繩索與滑輪之間的摩擦,造成繩索疲勞破壞[7]。如果在設計階段就對上料機構進行仿真,則可以通過仿真結果分析其結構是否合理,從而避免上述情況發生。
繩索的動力學行為非常復雜,未施加預緊力的繩索會在流體中晃蕩,繩索與滑輪的彈性接觸、繩索的收放和纏繞以及與其他物體的接觸,都增加了柔索建模的困難,阻礙了精確模型的建立。關于柔性繩索的仿真研究早期常用數值建模,但是柔性繩索體的數學仿真模型難以精確、有效地建立。要足夠準確地反映繩索的動力學特性,需編制的相應計算程序規模很大,且難以保證較高的可靠性[8]。近年來,隨著商用軟件的發展,許多學者通過動力學軟件研究繩索的仿真問題。其中應用廣泛的有丁振興等[9]通過運用CMD語言完成的鋼絲繩建模,該方法通過Bushing建立柔性繩索仿真模型,被稱為bushing法。該方法仿真精度較高,可模擬鋼絲繩起吊時與卷筒的纏繞及鋼絲繩的振動;但是其建模困難,且無法完成參數化建模和優化[10],不具備通用性,不熟悉ADAMS二次開發的用戶很難使用。
本文利用ADAMS/Cable 成功創建上料機構的動力學模型,并對其進行仿真分析,得到料箱的位移、速度、加速度和繩索應力的相關數據,能夠提高上料機構的設計速度和質量。
1ADAMS/Cable模塊
ADAMS/Cable柔性繩索建模仿真解決方案是MSC公司開發的集成在ADAMS中的模塊,其主要功能是滿足用戶對繩索類問題的快速建模與精確求解,模擬的對象包括各種鋼絲繩、傳送帶和膠片等傳動裝置,并且具有對各種滑輪機構的建模功能。
在ADAMS/Cable模塊中繩索有2種建模方式可以選擇。
(1)簡化模型(coupler mode):忽略該模型繩索的質量和慣性,繩索被認為是滑輪之間沿切線方向的具有剛度的虛擬體;繩索的速度由滑輪的角速度積分得到;繩索的張力通過繩索兩端的幾何變形計算得到;該繩索模型計算速度快,并且能準確得到滑輪的載荷。
(2)離散模型(guide mode):繩索被離散成一段段的parts、joints和forces;將離散的繩索在幾何上表示為球體,利用廣義力進行柔性連接。軸套力的計算方程為
F=-KX-CX[DD(-20x][KG*3]·[DD)]+F0(1)
式中:F為模型受的力;F0為模型初始受力;K為模型剛度;C為模型阻尼;X為模型位移;X[DD(-20x][KG*3]·[DD)]為模型速度。
使用離散模型計算時,因為考慮到了繩索的質量和慣性的影響,故能夠得到精確的繩索晃蕩姿態,模擬出繩索和滑輪的相互接觸力,但是計算速度會變慢。
2上料機構結構設計
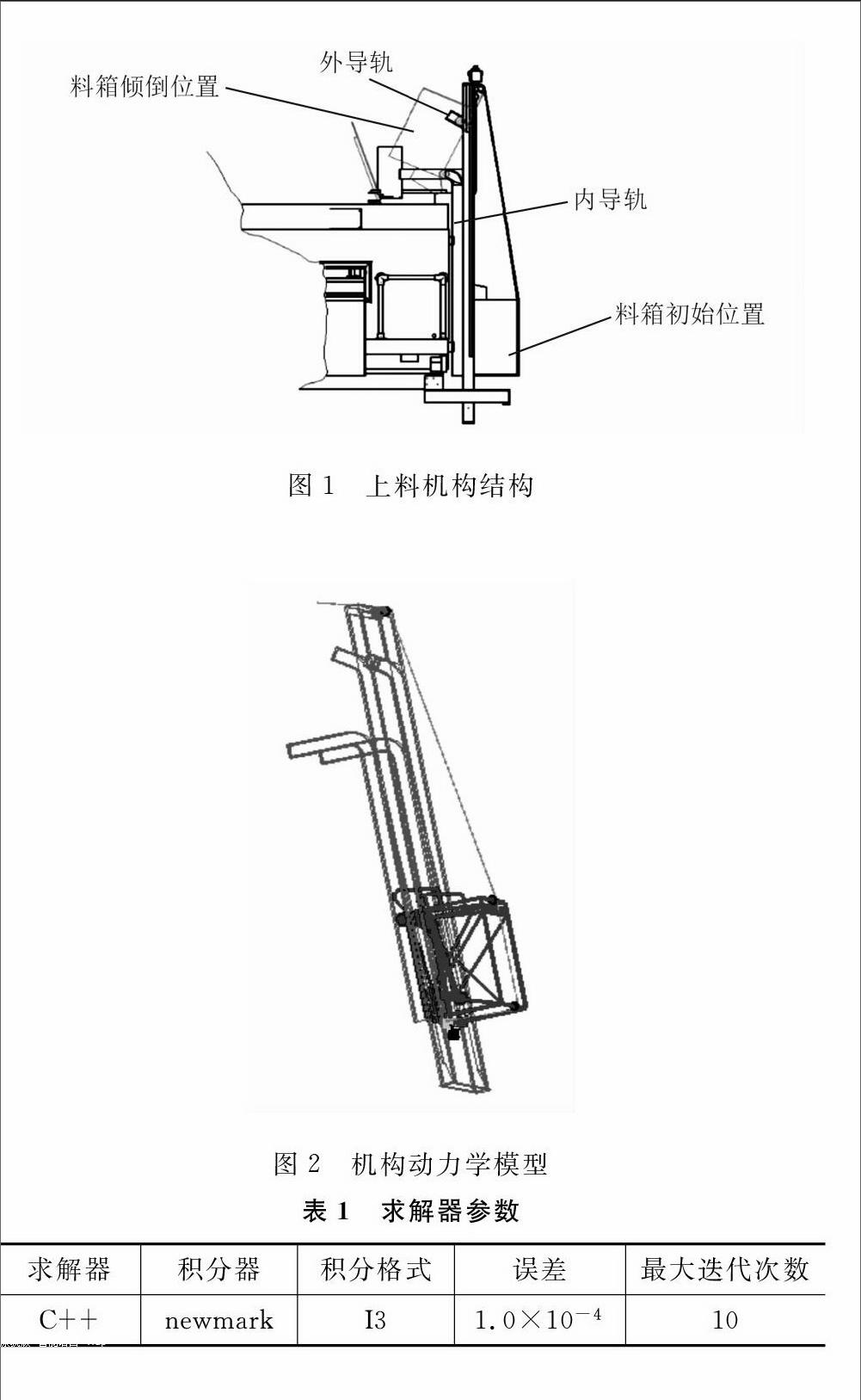
上料機構的主要作用是為瀝青路面養護車的瀝青混合料攪拌箱裝載原料,液壓馬達帶動絞車為上料機構的運動部件提供動力,使上料機構完成上移和翻轉2個動作。為滿足上述要求,設計的上料機構總體結構如圖1所示,其中為使上料機構能完成翻轉動作,內導軌和外導軌均有彎折部分。料箱滿載時150 kg,要求最終傾倒角度大于55° ,鋼絲繩直徑為9 mm,最小破斷拉力為313 kN。
3ADAMS 建模
將上料機構在ADAMS view中建模,模型如圖2所示。定義料箱輪子和軌道之間為Impact接觸。定義錨固點、滑輪特性、繩索特性、絞車驅動函數為step(time,0,0,2,200)+step(time,10,0,12,-200)。繩索特性選擇coupler mode。進行仿真時的參數如表1所示。
3.1ADAMS軌跡分析及繩索與料箱連接點的確定
上料機構的框架已經基本確定,但繩索與料箱的連接點還未確定,繩索在料箱上的固定位置會對機構的工作性能產生較大影響。現選擇料箱3條棱中點的一處作為連接繩索的固定點,通過分析上料機構工作過程中3個點的軌跡,獲得選擇不同固定點時機構的工作狀態,從而確定固定點的位置。
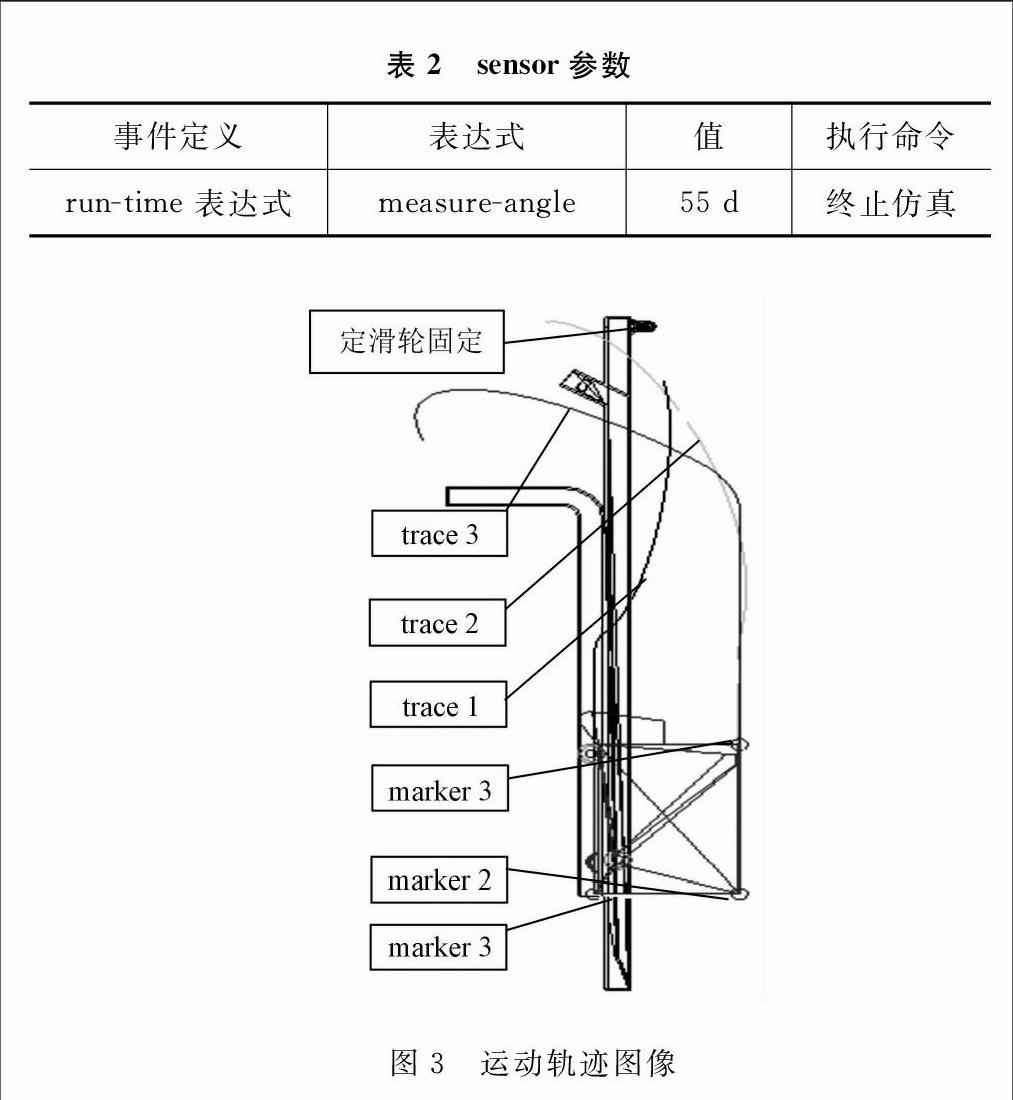
為得到3個備選點的軌跡,首先在上述3處分別添加mark點mark 1,mark 2和mark 3,然后給系統施加一個空間方向恒定向上的力,以便使料箱完成上料傾翻的動作。設置一個傳感器,sensor設置參數如表2所示。觸發條件為greater than or equal。
表2中的measureangle是測量函數,用來描述料箱的傾斜角度。該傳感器的作用是當料箱傾角不小于55° 時停止仿真。
當仿真完成后,獲得3個mark點的軌跡trace 1,trace 2,trace 3,如圖3所示。發現只有尾端在定滑輪固定點的右側,即繩索固定在mark 1時,料箱才能順利完成傾倒。
W=∫F·cos αds(2)
式中:W為繩子拉力所做的功;F為繩索的拉力;α為力與mark 1點位移的夾角;s為mark 1點位移。
由式(2)可知,α的值越小,繩索拉力對料箱的功分量越大,將料箱壓向導軌的分量就會越小,機構工作效率就會越高,結構受力越合理。在trace 1上均勻測量5個位置的α值,結果分別為:4.36° ,710° ,9.42° ,8.06° ,3.71° 。α的值已經很小,因此選擇mark 1點作為固定點可以保證機構的效率和良好的工況。
3.2料箱與導軌多接觸問題研究
ADAMS根據Hertz接觸理論,采用Impact函數提供的非線性等效彈簧阻尼模型作為接觸力的計算模型。該模型的接觸力由兩部分構成:一是2個構件之間相互切入而產生的彈性力;二是由相對速度產生的阻尼力。計算公式為
Fni=Kδei+CVi(3)
式中:Fni為法向接觸力(N);K為Hertz接觸剛度;δi為接觸點的法向穿深度;e為力指數;C為阻尼系數;Vi為相對速度。
由于該模型定義料箱輪子與導軌之間有多個Impact接觸,求解困難且容易發生錯誤。定義接觸后,求解速度變慢,經過分析認為由于接觸力躍變太大而產生數值困難,使仿真出錯停止。通過分段仿真法可以避免這些失誤[11],即將仿真的整個時間分割成數個小時間段分別進行仿真,不斷調用save命令和reload命令以實現目的;但是該方法會得到許多結果文件,需要編寫相應程序來完成對數據的整理,并且會增加仿真時長。
ADAMS的接觸力模型允許阻尼達到最大值后構件之間的相互切入還可以繼續。如果可以控制切入量始終保持在合理的范圍內,法向接觸力的數值躍遷狀況就會得到改善,仿真失敗的問題就能得到解決。由于該機構的軌跡是由軌道決定的,其運動軌跡可以準確獲得。利用3.1中創建的mark 1和trace 1在connectors中建立一個point to curve約束來規范料箱的運動,使車輪的滲入量保持在一個合理的范圍,從而避免了接觸力的躍變過大,接觸參數如表3所示。
表3接觸參數設置
法向力剛度/(N·mm-1)貢獻指數穿透值
impact1.0×1052.30.1
仿真失敗時料箱輪子的接觸力時間圖像如圖4所示,接觸力曲線躍變嚴重,曲線峰值變化很大且無規律,最終到11 s時導致仿真失敗。規范料箱運動軌跡之后得到的相同時段內的料箱輪子接觸力時間圖像如圖5所示,接觸力曲線比較平緩,沒有圖4中的躍變現象。
4結果分析
對調試好的模型進行仿真,得到料箱質心處的位移、速度、加速度和繩索張力隨工作時間變化的圖像,如圖6~9所示。
在4.5 s前,位移、速度和繩索張力變化平緩,當料箱開始傾斜即4.5 s處時,曲線的變化趨勢發生改變。圖6顯示料箱質心位移隨工作時間變化平緩。從圖7可以看出,工作時間從4.5~6 s時料箱質心速度變化比較大,這是由于料箱的空間運動形式從單純的平移變成平移加旋轉,從而使得料箱質心處速度開始變慢。如圖8所示,加速度的非周期震動由輪子與導軌的切入量變化引起,在實際工況中加速度變化會平緩許多。圖9中鋼絲繩受力最大值為1 700 N,產生在料箱即將反轉之前,在料箱完成傾翻動作之后鋼絲繩受力變小,這是因為料箱傾斜以后得到豎直方向的支持力,會使繩索受力減輕。
綜合以上數據及分析結果可知,上料機構的危險工況是料箱在傾翻動作時發生的,此時的繩索受力最大,且應力變化較快。為減小該工況的應力及應力變化速度,應避免上料機構產生嚴重的沖擊載荷,使導軌彎折更加平滑,從而使各上料機構的工作更加平穩。結合實際工作,這些數據還將為該機構的進一步研究提供基礎。
5結語
本文利用ADAMS/Cable模塊實現繩索機構的全參數化建模,效率高并且能得到準確的仿真結果。在仿真過程中,通過對料箱運動軌跡的分析以及約束,驗證了選擇繩索固定點的正確性,并克服了ADAMS中多體接觸容易仿真失敗的問題,為此類仿真工作提出了新方法。通過對仿真數據的分析,驗證了該上料機構的結構滿足設計要求,且找到了該機構的不足之處,并指明了改進方案。
參考文獻:
[1]李海斌,杜志彬,邊楊.“十三五”時期中國專用汽車市場發展的宏觀環境分析[J].專用汽車,2014(11):7072.
[2]胡忠錄,李應強.瀝青路面養護快速化探討[J].筑路機械與施工機械化,2010,27(11):6264.
[3]楊艷妮.外燃式混合料加熱滾筒設計及熱能利用研究[D].西 安: 長安大學,2012.
[4]靳長征.多功能養護車應用之辯[J].工程機械與維修,2015(3):16.
[5]靳煒.自行式瀝青路面養護車工程配置的量化分析[J].筑路機械與施工機械化,2011,28(5):6567.
[6]霍太林.道路綜合養護車現狀及產品開發研究[J].筑路機械與施工機械化,2006,23(1):2730.
[7]李永波,魏禹.基于虛擬樣機滑輪繩索機構的建模及仿真分析[J].應用科技,2013,40(3):15.
[8]胡曉楠,張建斌,趙國偉.柔性繩索在空氣阻力作用下的動力學仿真研究[J].機械科學與技術,2010,29(10):13341337.
[9]丁振興,陶元芳,薛孝磊,等.基于CMD語言的起重機鋼絲繩建模方法研究[J].起重運輸機械,2012(2):1721.
[10]韓莉莉,許軍輝,寧祎,等.基于ADAMS/Cable模塊的柔索驅動仿真研究[J].中原工學院學報,2014,25(6):15.
[11]石明全.基于ADAMS的多接觸問題研究[J].計算機工程與應用,2004,40(29):220222.
[責任編輯:黨卓鈺]
