迭代學習模型預測控制算法在鍋爐過熱汽溫中的應用
2017-01-17 03:46:42杜文艷雷鵬娟
承德石油高等專科學校學報 2016年6期
關鍵詞:模型
畢 磊,杜文艷,雷鵬娟
(1.承德石油高等專科學校 電氣與電子工程系,河北 承德 067000;2.中核控制系統工程有限公司,北京 100176)
迭代學習模型預測控制算法在鍋爐過熱汽溫中的應用
畢 磊1,杜文艷2,雷鵬娟1
(1.承德石油高等專科學校 電氣與電子工程系,河北 承德 067000;2.中核控制系統工程有限公司,北京 100176)
為提高鍋爐經濟有效且安全運行,采用一種模型預測控制融入到迭代學習控制的算法,不僅能夠迅速準確地完成對期望軌跡的完全跟蹤任務,而且具有實時抗外界干擾的能力,加快過熱汽溫穩定,控制跟蹤速度,提高鍋爐運行效率。
過熱汽溫;模型預測控制;迭代學習控制
在電廠實際運行當中,想要提高經濟效益并且要保證機組的安全運行,必須實現過熱汽溫穩定控制,過熱汽溫是隨時間在不斷變化,其中任何一個小的擾動都有可能引起過熱汽溫變化,傳統PID控制器的參數不隨外界的擾動而變化,僅用“不變”的PID控制器去控制“時變”的過熱汽溫,效果不理想。起源于實際過程控制領域的模型預測控制[1]不僅控制性能好,且具有很好的魯棒性,本算法除了能有效地克服操作過程中的不確定性、耦合性及多變量問題,還能顯式的解決過程控制變量中的約束問題。但是僅單純應用模型預測控制,則很難實現被控對象的輸出完全無誤差跟蹤設定目標的輸出軌跡,然而迭代學習控制[2]則很容易處理這類軌跡跟蹤問題[3-6],因為迭代學習控制有很強的學習能力。結合這兩種控制算法的優缺點,筆者將模型預測控制融合到迭代學習控制算法[7,8]中,并將此算法應用到鍋爐過熱汽溫系統,并與PID算法效果相比較,驗證了迭代學習模型預測控制算法在鍋爐過熱汽溫控制方面的優越性。
1 迭代學習模型預測控制算法描述
1.1 問題描述
首先來定義一多輸入多輸出(MIMO)的重復離散控制系統,控制過程的操作域為固定長度[0,N],N為采樣數。在第N個采樣點上,輸出序列和輸入序列分別為y和u。d則是干擾序列。輸入、輸出及干擾的數據序列如下表示:
u=[uΤ(0),uΤ(1),uΤ(2)…uΤ(N-1)]Τ
(1)
y=[yΤ(1),yΤ(2),yΤ(3)…yΤ(N)]Τ
(2)
d=[dΤ(1),dΤ(2),dΤ(3)…dΤ(N)]Τ
(3)
其中,過程控制系統的輸出維數和輸入維數分別為ny和nu。到第t個采樣點上,輸出采樣個數和輸入采樣個數分別為nut和nyt。t∈[0,N],u∈Rnu·N,y∈Rny·N。d是不可測量的干擾,d中有一部分是重復的,重復部分是在每一次的迭代過程中都會出現的那一部分,其余的部分則是在重復過程中隨機出現的。一般非線性重復過程可以描述為如下的輸入輸出關系:
y=g(u,d)
(4)
控制目標是想通過調整輸入值,使離散控制系統的輸出軌跡完全跟蹤期望輸出軌跡。假定yd為期望軌跡,ud為期望控制量,現在給出跟蹤誤差e的表達式
e=yd-y=g(ud,0)-g(u,d)
(5)

(6)
(7)
那么第k次重復過程誤差模型表示為
(8)
令
(9)
則
(10)
(11)

(12)
通過式(8)和(12)得下式
(13)

(14)
1.2 動態誤差模型的建立
式(14)定義為過渡誤差模型,從中可以看出過渡誤差模型是在迭代次序的基礎上推導出來的,因此這種控制算法無法在每一次的迭代過程中實現實時誤差補償,所以就需要引入誤差動態模型來進行控制器的設計,動態誤差模型是基于時間的,以此來實現實時誤差的補償。
首先把式(11)中的下三角矩陣A(系統的脈沖響應矩陣)進行分塊,定義如下:
A=[A(0),A(1),A(2)…A(N-1)],A(j)∈R(ny,N)×nu
(15)
設
ek(t)=[ek(1),ek(2),ek(3),…ek(t)…ek(N)]Τ
(16)
ek(t)為當Δuk(t)=Δuk(t+1)=…=Δuk(N-1)=0時第k次迭代過程中的輸出離散誤差序列。通過脈沖響應矩陣A和ek(t)的定義和過渡誤差模型(14),可以得到
(17)
其中Δuk+1=uk+1-uk,是相鄰的兩個重復操作過程間的差值,同理:
(18)
由上兩式可得
(19)
1.3 卡爾曼估計
我們用卡爾曼濾波[9]來構造具有最優狀態估計的最優預測控制器,詳細推導過程如下:
(20)
(21)
Kk(t)為增益矩陣,Pk(t)為協方差矩陣,ek(t+m|t)表示的是在第k次迭代過程中從t時刻到t+m-1時刻的輸入發生改變時,在t時刻對離散誤差序列的預測,通過下列方程計算得出:
(22)

1.4 控制律的推導
為防止過程控制量的劇烈變化和超調,可采用下式所示的二次性能指標:
(23)

控制律可通過下式計算
(24)
僅控制量的第一個元素Δuk(t)得到實施。
2 迭代學習模型預測控制算法在鍋爐過熱汽溫中的研究
鍋爐主汽溫的控制是非常嚴格的,文獻[10]是對某600MW超臨界直流鍋爐的過熱器在噴水擾動情況下的汽溫特性進行動態機理分析,該文獻詳細計算了高溫加熱器四個典型負荷點處的出口汽溫在噴水擾動下的傳遞函數,見表1。文獻[10]采用的是傳統的PID控制,控制參數見表2。
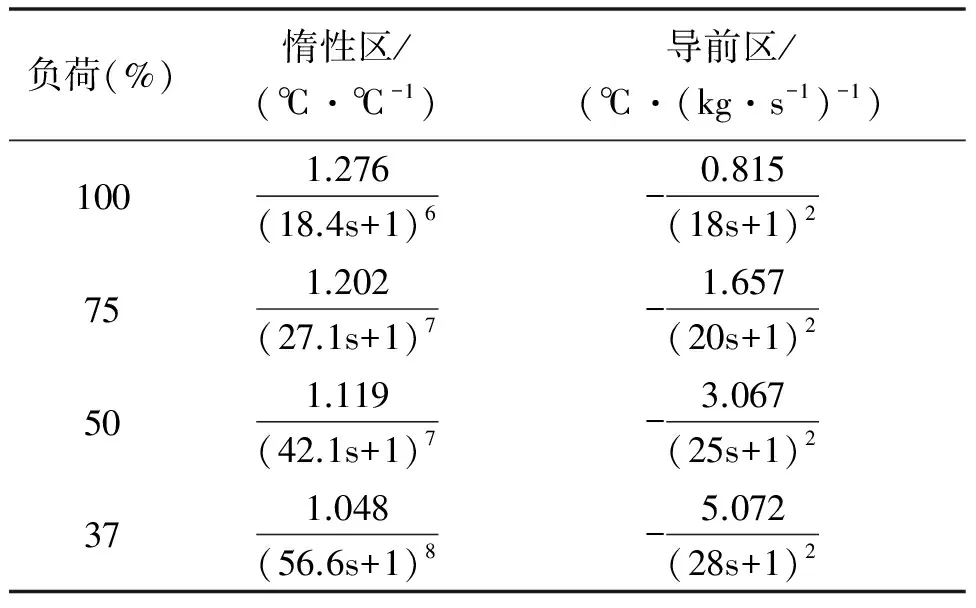
表1 出口汽溫在噴水擾動下的傳遞函數

表2 PID控制參數
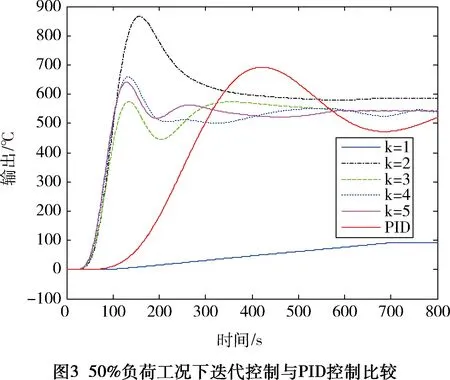
我們采用同樣的被控對象,在四個不同的負荷下,分別采用文獻[10]中的PID控制方法和迭代學習模型預測控制算法,用MATLAB仿真。仿真結果如圖1~圖4所示。仿真圖的輸出是鍋爐主汽溫(單位為℃),橫坐標是控制時間(單位為s)。
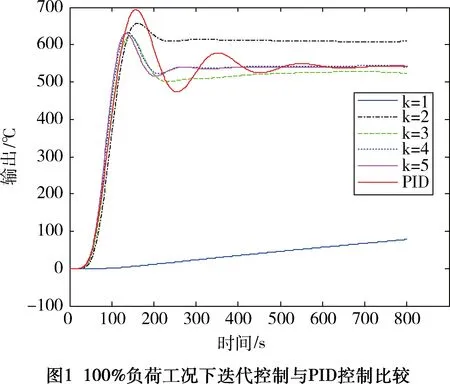

從仿真圖1中可以看出,第五次迭代學習模型預測控制收斂效果明顯優于PID控制,能夠加快過熱汽溫穩定速度,提高鍋爐運行效率。圖2~圖4分析方法同理。
3 結論
在四個典型負荷工況下,采用迭代學習模型預測控制算法的輸出軌跡遠優于PID控制輸出軌跡,應用迭代學習模型預測控制算法能讓控制目標更早收斂于期望值,驗證了算法的優越性。
[1] Rawlings JB. Tutorial Overview of Model Predictive Control[J].IEEE Control System,2000,20(3):38-52.
[2] ARIMOTO S, KAWAMURA S, MIYAZAKI F. Bettering operation of robotics by learning[J].Robotic System,1984,1(2):1123-1140.
[3] 孫明軒,黃寶健.迭代學習控制[M].北京:國防工業出版社,2000.
[4] 謝勝利,田森平,謝振東.迭代學習控制的理論與應用[M].北京:科學出版社,2005.
[5] 林輝,王林.迭代學習控制理論[M].西安:西北工業大學出版社,1998.
[6] 于少娟,齊向東,吳聚華.迭代學習控制理論及應用[M].北京:機械工業出版社,2005.
[7] J.H. Lee, K. S. Lee, W. C. Kim. Model-based Iterative Learning Control with aquadratic Criterion of Time-varying Linear Systems[J].Automatic, 2000,36(5):641-657.
[8] I. S. Chin, H. J. Lee. Model Predictive Control Technique Combined with Iterative Learning Control of Batch Process[J].AICHE J,1999,45(10): 2175-2187.
[9] Kalman RE.A new Approach to Linear Filtering and Prediction Problem[J].Transaction of the ASME-Journal of Basic Engineering,1960,32(6):35-45.
[10] 范永勝,徐治皋,陳來九.基于動態特性機理分析的鍋爐過熱汽溫自適應模型模糊控制研究[J].中國電機工程學報,1997,17(1):23-28.
Application of Iterative Learning Model Predictive Control Algorithm on Superheated Steam Temperature
BI Lei1, DU Wen-yan2, LEI Peng-juan1
(1.Department of Electrical and Electronic Engineering, Chengde Petroleum College, Chengde 067000, Hebei, China; 2.China Nuclear Control System Engineering Co., LTD, Beijing 100176, China)
To improve the cost-effective and safe operation of the boiler, an algorithm of model predictive control into iterative learning control can quickly and accurately achieve the desired trajectory tracking task with real-time anti-jamming ability. It has the ability of speed superheated steam temperature stability, controlling tracking, and improving boiler operating efficiency.
superheated steam temperature; model predictive control; iterative learning control
河北省高等學校科學技術研究青年基金項目(迭代學習模型預測控制算法研究與應用):QN20131122
2016-07-24
畢磊(1980-),男,遼寧阜新人,講師,主要從事儀表自動化研究,郵箱17299328@qq.com。
TK22
B
1008-9446(2016)06-0057-04
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
