北斗空時(shí)抗干擾降維算法研究
2017-01-18 05:26:37張新帥吳雅娟陳金令
艦船電子對抗 2016年6期
康 博,張新帥,路 明,吳雅娟,陳金令
(四川九洲電器集團(tuán)有限公司,綿陽 621000)
北斗空時(shí)抗干擾降維算法研究
康 博,張新帥,路 明,吳雅娟,陳金令
(四川九洲電器集團(tuán)有限公司,綿陽 621000)
空時(shí)抗干擾算法有著優(yōu)良的抗干擾性能,但需要對高維矩陣求逆,計(jì)算量過大難以工程實(shí)現(xiàn)。因此,需要對其進(jìn)行降低計(jì)算量處理以利于工程實(shí)現(xiàn)。基于相關(guān)相減多級維納濾波法可降低計(jì)算量,并有著優(yōu)良的抗干擾性能,對其進(jìn)行了仿真試驗(yàn),并證明了其有效性。
北斗系統(tǒng);降維;相關(guān)-相減多級維納濾波
0 引 言
隨著我國北斗衛(wèi)星導(dǎo)航系統(tǒng)的不斷完善,其應(yīng)用也越來越廣泛,重要性也日益加深。但衛(wèi)星信號自發(fā)射端到地面?zhèn)鬏斁嚯x極遠(yuǎn),到達(dá)地面的衛(wèi)星信號功率很低,容易受到干擾的影響,致使接收機(jī)不能正常工作,不能提供有效的定位信息,因此需要在接收機(jī)前端增加抗干擾模塊進(jìn)行干擾抑制。目前主要的抗干擾方法有時(shí)域?yàn)V波抗干擾技術(shù)、空域?yàn)V波抗干擾技術(shù)、空時(shí)抗干擾技術(shù)和空頻抗干擾技術(shù)等[1-2]。空時(shí)抗干擾技術(shù)是在空域抗干擾技術(shù)的基礎(chǔ)上,在天線陣的每個(gè)陣子后面增加若干時(shí)間延遲單元,使得算法的自由度極大提高,能夠更加有效地對窄帶干擾和寬帶干擾進(jìn)行有效的抑制,使后端的接收機(jī)能夠正常工作[3]。雖然空時(shí)抗干擾技術(shù)對干擾有著很好的抑制性能,但由于增加了若干延遲單元,使得自相關(guān)矩陣維度急劇升高,對自相關(guān)矩陣直接求逆的計(jì)算量很大,不便于工程實(shí)現(xiàn),因此需要對其進(jìn)行降維處理,降低計(jì)算量[4]。
J.S.Goldstein在維納濾波的基礎(chǔ)上做出了改進(jìn),提出了多級維納濾波法(MWF)[5-6]。該方法每過一級維納濾波自相關(guān)矩陣維度減1,而且該方法不用求解逆矩陣,但每級維納濾波都含有一個(gè)阻塞矩陣,阻塞矩陣計(jì)算繁瑣,經(jīng)過MWF之后雖然計(jì)算量得到降低,但依舊較大[7]。在MWF基礎(chǔ)上改進(jìn)的相關(guān)相減多級維納濾波法(CSA-MWF)避免了自相關(guān)矩陣和阻塞矩陣的求解,使得計(jì)算量得到進(jìn)一步的簡化。本文針對MWF和CSA-MWF進(jìn)行了仿真實(shí)驗(yàn),證明了相關(guān)相減多級維納濾波法的有效性。
1 空時(shí)抗干擾技術(shù)
空時(shí)抗干擾技術(shù)在前端和空域抗干擾技術(shù)相同,都是若干個(gè)天線陣子按照一定的排列組成的天線陣,在每個(gè)天線陣子后面空時(shí)抗干擾技術(shù)增加了若干個(gè)時(shí)間延遲單元,進(jìn)而形成了空時(shí)結(jié)構(gòu),其結(jié)構(gòu)如圖1所示。

圖1 空時(shí)二維處理結(jié)構(gòu)圖
圖1中M表示天線陣子的個(gè)數(shù),N表示延遲單元的個(gè)數(shù),Δ表示每個(gè)抽頭的時(shí)延,Δ≤1/B,B表示信號的帶寬,xij表示第i個(gè)天線陣子第j個(gè)抽頭接收到底數(shù)據(jù),wij表示第i個(gè)天線陣子第j個(gè)抽頭的權(quán)值。
整個(gè)天線陣列的MN×1維接收數(shù)據(jù)向量X表示為:
(1)
權(quán)值矢量W可表示如下:
(2)
根據(jù)最小方差無失真響應(yīng)準(zhǔn)則(MVDR)可得:
(3)
最優(yōu)全矢量可以表示為:
(4)

空時(shí)抗干擾算法的最終輸出表示為:
(5)
2 多級維納濾波法
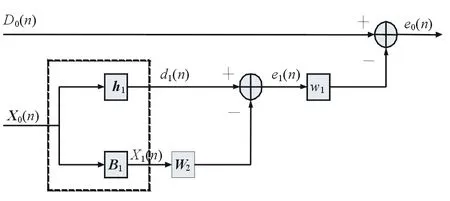
圖2 二級維納濾波結(jié)構(gòu)圖
在圖2中,虛線框內(nèi)為滿秩矩陣T1:
(6)
式中:h1為d0與X0的歸一化互相關(guān)向量,表示為:
(7)
B1為h1的阻塞矩陣,即:
B1h1=0
(8)
輸入信號經(jīng)過滿秩矩陣T1得到A1(n),可表示為:
(9)
此時(shí)的權(quán)矢量表示為:
(10)
式中:
(11)
對其矩陣求逆得到:
(12)
式中:
(13)
因此:
(14)
式中:δ1=‖rX0d0‖。
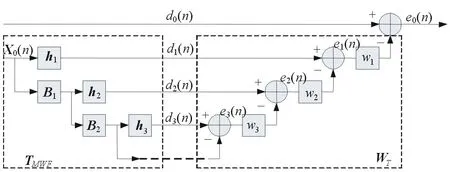
圖3 多級維納濾波圖
此刻,矩陣求逆轉(zhuǎn)換為多個(gè)標(biāo)量求倒數(shù),計(jì)算量大大降低[8]。
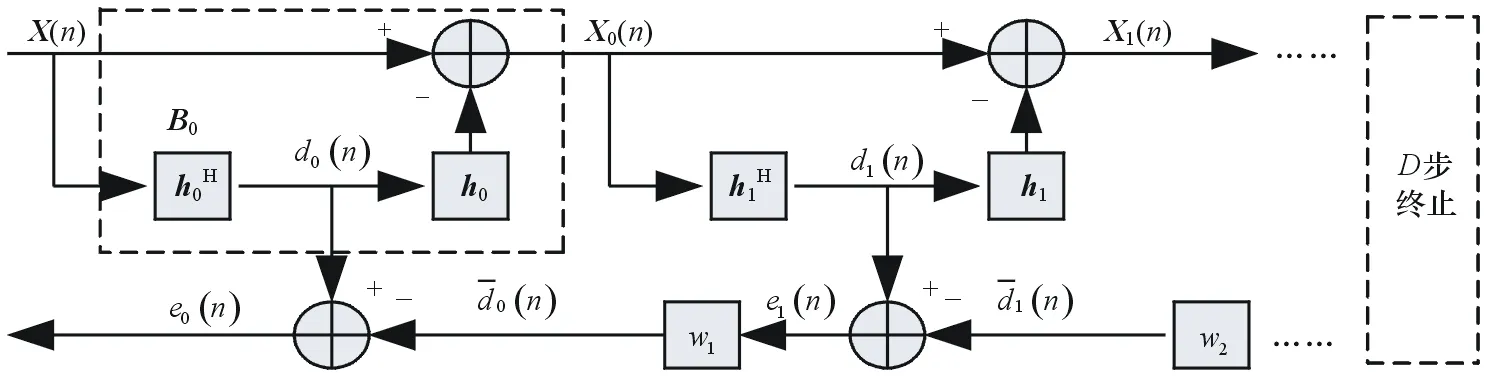
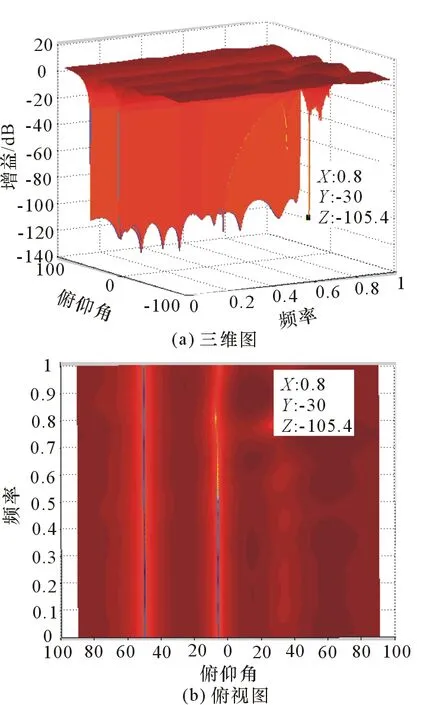
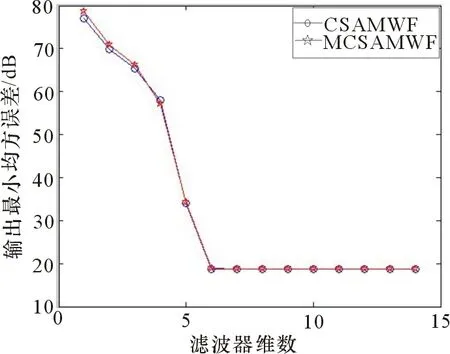
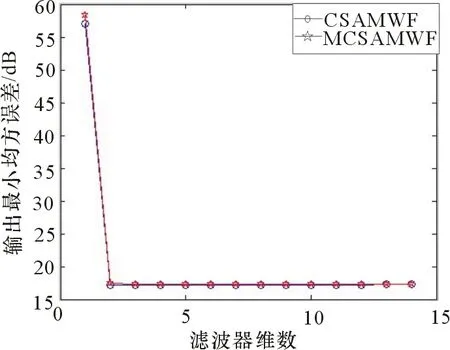
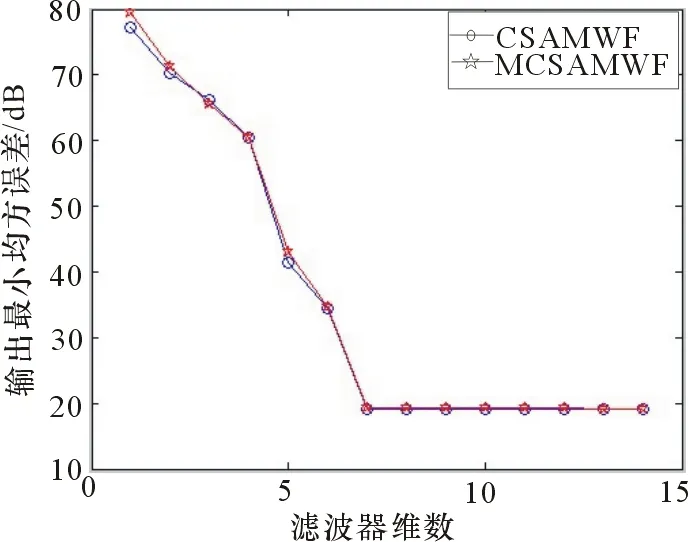
在實(shí)際中,只需進(jìn)行到D(D 相關(guān)相減多級維納濾波法避免了多級維納濾波法阻塞矩陣不易求出的問題,其結(jié)構(gòu)框圖如圖4所示。 圖4 CSA-MWF結(jié)構(gòu)圖 前向迭代部分: hi= Xi(n)=Xi-1(n)-hi(n)di(n) end 后向迭代部分: eD(n)=dD(n) end 權(quán)矢量迭代部分: wp=1 Wi=wp end 4.1 CSA-MWF抗干擾性能仿真 仿真條件:天線陣陣子個(gè)數(shù)M=7;延遲單元N=8;B1頻點(diǎn)的入射信號信噪比-20 dB;分別從俯仰角50°、6°和-30°入射寬帶、部分寬帶和窄帶3個(gè)干擾信號,干信比均為80 dB;其中寬帶干擾信號的歸一化頻率為0~1;部分寬帶干擾信號的歸一化頻率為0~0.5;窄帶干擾信號的歸一化頻率為0.8;CSA-MWF階數(shù)D=18;仿真結(jié)果如圖5所示。 圖5 CSA-MWF方向圖 從仿真結(jié)果可以看出:在俯仰角50°方向上形成了歸一化頻率0~1、幅度約104dB的零陷,有效抑制了寬帶干擾;在俯仰角6°方向上形成了歸一化頻率0~0.5、幅度約106dB的零陷,有效抑制了部分寬帶干擾;在俯仰角-30°方向上形成了歸一化頻率0.8、幅度約105dB的零陷,有效抑制了窄帶干擾,并且其它方向上方向圖相對平坦,不會對其它方向入射的衛(wèi)星信號進(jìn)行抑制。因此可知,經(jīng)過相關(guān)相減多級維納濾波法后能夠針對寬帶干擾、部分寬帶干擾和窄帶干擾進(jìn)行有效抑制,并且保留有效信號。 4.2 MWF和CSA-MWF輸出均方誤差對比 天線陣陣子個(gè)數(shù)M=3;延遲單元N=5;B1頻點(diǎn)的入射信號信噪比-20dB;分別入射干信比均為80dB的窄帶干擾信號、寬帶干擾信號和混合干擾信號情況下不同濾波器階數(shù)的MWF和CSA-MWF輸出的最小均方誤差如圖6~8所示。 圖6 寬帶干擾情況下的最小均方誤差 圖7 窄帶干擾情況下的最小均方誤差 圖8 混合干擾情況下的最小均方誤差 從仿真結(jié)果可以看出:分別在寬帶干擾、窄帶干擾和混合干擾情況下,當(dāng)濾波器階數(shù)分別為6,2,7時(shí),MWF和CSA-MWF同時(shí)收斂且輸出的最小均方誤差基本相同。因此CSA-MWF和MWF經(jīng)過一定的濾波器階數(shù)達(dá)到收斂時(shí),兩者的性能基本相同,但由于CSA-MWF不需要求解阻塞矩陣,計(jì)算量相對于MWF更低。 空時(shí)抗干擾技術(shù)雖然相對于傳統(tǒng)的抗干擾技術(shù)有著更優(yōu)秀的性能,但整個(gè)算法過程的計(jì)算量過大,給工程實(shí)現(xiàn)帶來了不便,因此對其進(jìn)行計(jì)算量簡化的研究就十分必要。本文給出了相關(guān)相減多級維納濾波法的算法過程,其不用求解阻塞矩陣和接收信號自相關(guān)矩陣求逆的特點(diǎn)使得該算法計(jì)算量相對于多級維納濾降維算法的計(jì)算量更低,其性能基本相同,便于工程實(shí)現(xiàn)。 [1] 郭藝.GPS接收機(jī)空時(shí)抗干擾理論與實(shí)現(xiàn)關(guān)鍵技術(shù)研究[D].長沙:國防科技大學(xué),2007. [2] 何訸.GNSS接收機(jī)抗干擾技術(shù)研究 [D].成都:電子科技大學(xué),2013. [3] 董李梅.一種變步長自適應(yīng)算法在GPS空時(shí)抗干擾中的應(yīng)用[J].通信技術(shù),2015,48(3):295-297. [4] 張海亮.導(dǎo)航接收機(jī)天線互耦校正及抗干擾算法研究 [D].成都:電子科技大學(xué),2013. [5]SCOTTGJ,REEDIS,SCHARFLL.Amulti-stagerepresentationoftheWienerfilterbasedonorthogonalprojections[J].IEEE,1998, 44 (7):2943-2959. [6] 丁前軍,王永良,張永順.自適應(yīng)陣列中多級維納濾波器的有效實(shí)現(xiàn)方法[J].電子與信息學(xué),2006,28(5):937-938. [7] 曹建波.GPS接收機(jī)降維空時(shí)聯(lián)合處理算法研究 [J].現(xiàn)代導(dǎo)航,2014(3):162-163. [8] 楊克元.GPS接收機(jī)抗干擾算法及其實(shí)現(xiàn)研究 [D].成都:電子科技大學(xué),2010. Study of Dimension Reduction Algorithm for Beidou Space-time anti-jamming KANG Bo,ZHANG Xin-shuai,LU Ming,WU Ya-juan,CHEN Jin-ling (Sichuan Jiuzhou Electric Group Co. Ltd.,Mianyang 621000,China) Space-time anti-jamming algorithm has good anti-jamming performance,but need perform matrix inversion to high-dimension matrix,so the engineering realization is difficult for large calculation quantity,thereby it is necessary for engineering realization to reduce the calculation quantity.Because the algorithm of correlation subtraction architecture of the multistage Wiener filter (CSA-MWF) can reduce the calculation quantity,and has fine anti-jamming performance,this paper performs simulation test and proves the validity. Beidou system;dimension reduction;correlation subtraction architecture of the multistage Wiener filter 2016-02-20 TN973.3 A CN32-1413(2016)06-0073-04 10.16426/j.cnki.jcdzdk.2016.06.0163 相關(guān)相減多級維納濾波法




4 仿真試驗(yàn)
5 結(jié)束語