數字滯環控制器設計
2017-01-20 09:55:36張建生張永華宋朋飛
電源技術 2016年3期
張建生, 張永華, 宋朋飛
(1.河海大學能源與電氣學院,江蘇南京211000;2.常州工學院電子信息與電氣工程學院,江蘇常州213002)
數字滯環控制器設計
張建生1,2, 張永華1, 宋朋飛1
(1.河海大學能源與電氣學院,江蘇南京211000;2.常州工學院電子信息與電氣工程學院,江蘇常州213002)
分析了滯環控制開關頻率不固定的原因,并在原有基礎之上進行改進,設計了一種新的數字滯環控制器,實驗結果表明,可以方便限制最高開關頻率及保持較高的控制精度。
滯環控制;數字化;開關頻率
滯環控制是一種廣泛應用的跟蹤控制技術,具有硬件電路比較簡單、響應速度快、不需要載波、輸出波形不含有特定頻率的諧波分量等優點[1]。但是其開關頻率不固定,致使設計濾波電路困難,此外開關頻率有可能超過開關管的截止頻率。針對滯環控制的特點以及數字化實現的要求,設計了數字化滯環控制器。
1 滯環電流控制的拓撲及基本原理分析
滯環電流控制電路拓撲如圖1所示,工作原理[1-2]:當指令電流與實際電流的偏差-到達滯環比較器上界時,給VT1施加關斷信號,延時給VT2施加導通信號,由于負載是感性負載,VT2承受反壓而不能立即導通,先由VD2續流,電流減小,直至-等于零,VT2導通,電流繼續減小;當-到達滯環比較器下界時,給VT2施加關斷信號,延時給VT1施加導通信號,同理由于負載是感性負載,先由VD1續流,電流增大,直至-等于零,VT1導通,電流繼續增大;當-到達滯環比較器上界時,給VT1施加關斷信號,延時給VT2施加導通信號,循環下去。圖2所示為滯環電流控制波形及觸發脈沖信號。

圖1 滯環電流控制電路
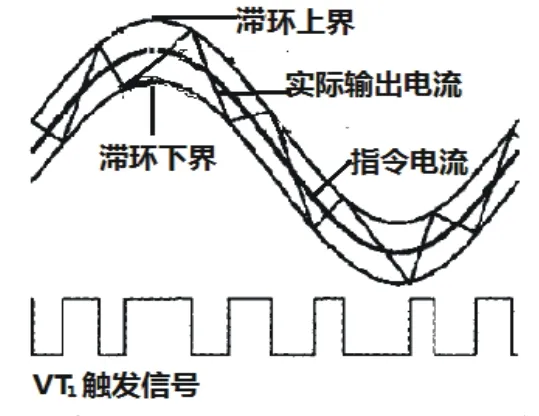
圖2 滯環電流控制工作原理及形成VT1的觸發信號
2 開關頻率的分析
在高頻逆變電路中,對于阻感負載來說,開關管導通時,即電源側向負載供能時[3-4],有:
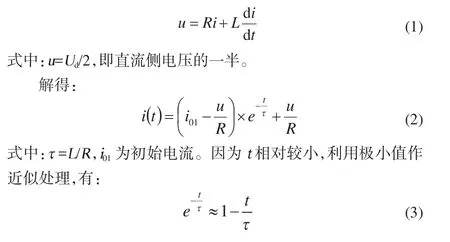
將(3)式代入(2)式,并求導則有:

當開關管關斷時,即負載向電源側饋能時,有:

解得:

同理可得電流變化率為:


圖3 最大開關頻率時各參數示意圖
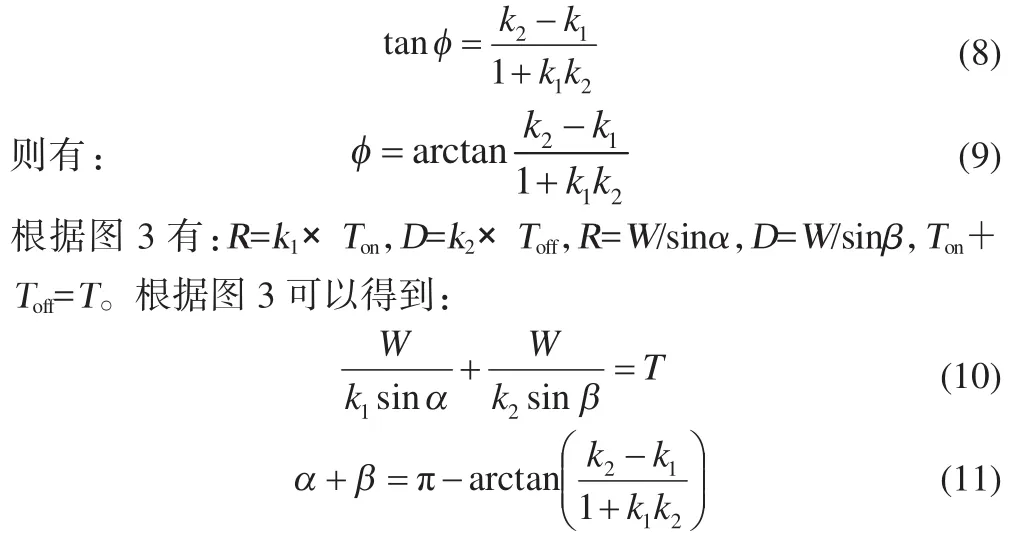
當滯環環寬是固定的時候,在開關頻率最大處有:

式中:δ為指令信號與水平線間夾角,聯立(10)~(13)式,可以確定開關的最大頻率。從式(10)、(11)可以看出,對于滯環控制電路來說,參數之間顯然是非線性關系,保證開關頻率不變,實施起來很不方便。可見,當電路參數確定之后,實際輸出波形與指令信號變化非同步變化時,會導致指令信號與實際信號相對變化率成非線性,最終導致開關頻率的不確定性。針對模擬式滯環控制器的特點,設計了數字滯環控制器,可以較好地解決滯環控制頻率不固定而導致開關頻率可能會超過開關器件的截止頻率問題,限制開關最高頻率。
3 數字滯環控制實現方案及結論
數字滯環控制思想:根據滯環環寬和負載參數來大體確定開關管的最高頻率,即開關管的最小周期。將開關最小周期設置為定時器定時時間。當指令信號變化率大于|γ|時,開關頻率接近于最大開關頻率,取消定時設置,直接使用滯環控制工作。當指令信號變化率小于|γ|,開啟定時器功能來保證開關頻率的相近性。當指令信號處于上升的階段時,且指令信號大于實際信號時,輸出高電平;當定時時間到,且指令信號小于實際信號時,輸出低電平。當指令信號處于下降的階段時,且定時時間到,指令信號大于實際信號時,輸出高電平;當指令信號小于實際信號時,輸出低電平。通過Matlab Simulink進行仿真實驗,仿真結果如圖4所示。實際控制系統以DSP 2812作為控制器,其高速數字處理功能,可以保證系統實時性和控制精度。實驗結果如圖5所示。
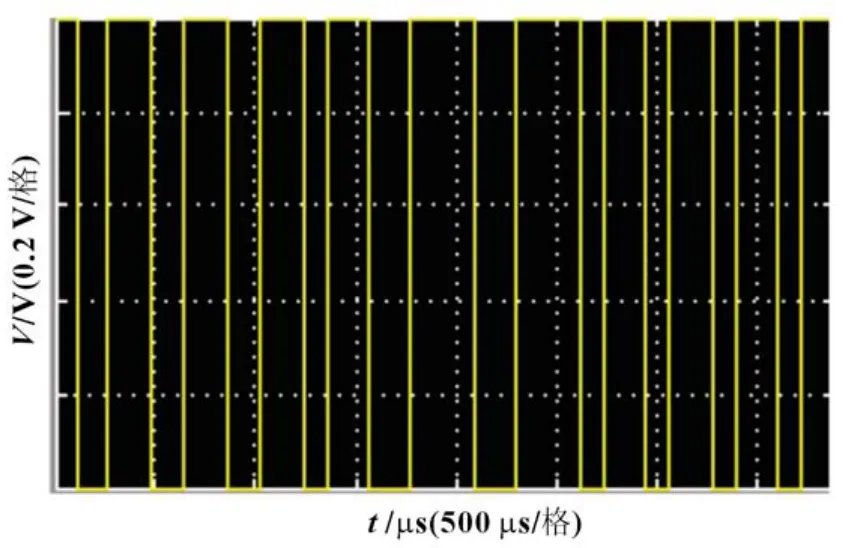
圖4 仿真結果
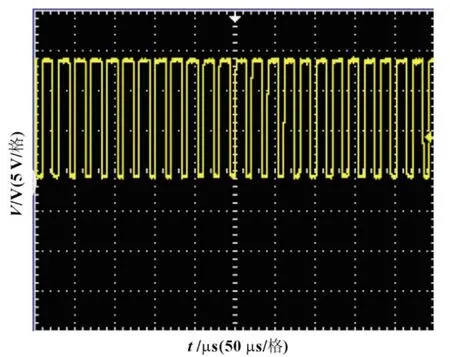
圖5 實驗結果
主程序流程圖如圖6。
從仿真結果和實驗結果可以看出開關頻率基本保持不變。說明該方案是可行的。
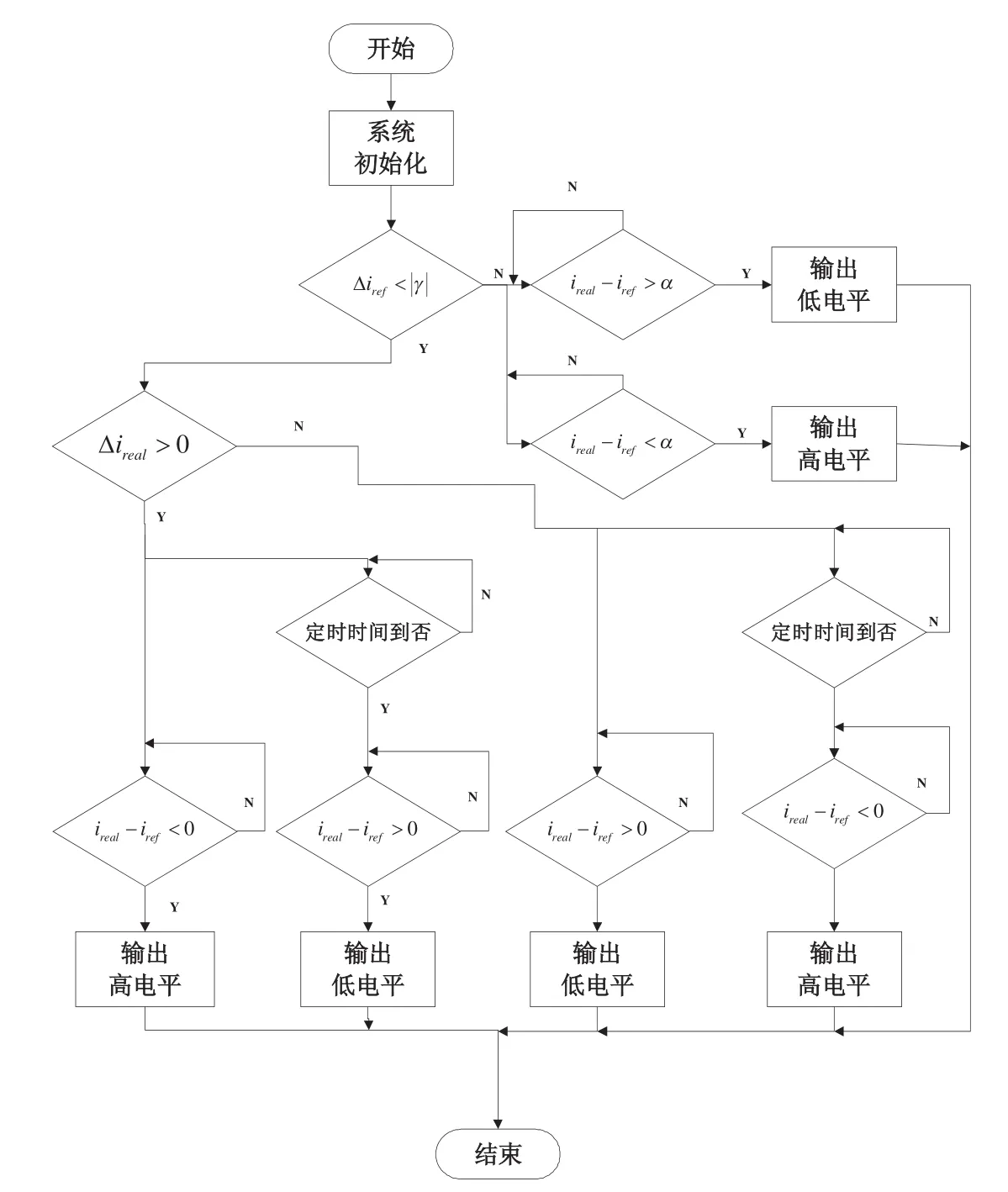
圖6 主程序流程圖
[1]王兆安,黃俊.電力電子技術[M].北京:機械工業出版社,2000.
[2]李宋,葉滿園.隨機帶寬滯環電流控制技術[J].電力電子技術,2010,44(9):72-73.
[3]張加勝,郝榮泰.滯環控制變流器的開關頻率研究[J].電工電能新技術,1998(1):54-56.
[4]孟建華,蔚泉清,劉靖峰.定時和滯環相結合的跟蹤控制方法[J].西安工程大學學報,2008,22(5):592-595.
Designation of digital hysteresis controller

The reason which the switching frequency of hysteresis control without fixing was analyzed.A new digital hysteresis controller was designed based on the original design.The experiment results show that it makes it easily limiting the maximum switching frequency and acquiring higher control accuracy.
hysteresis control;digital;switching frequency
TM 57
A
1002-087 X(2016)03-0690-03
2015-08-27
國家自然科學基金 (51175052);常州市科技項目(CJ20130014)
張建生(1958—),男,江蘇省人,博士,教授,碩士生導師,主要研究方向為計算機數字控制與控制工程。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52
