基于監控信息的船舶電力設備故障診斷系統設計
2017-02-03 02:05:30李玉生王家林
船電技術 2017年12期
李玉生,王家林,尹 洋
?
基于監控信息的船舶電力設備故障診斷系統設計
李玉生1,王家林2,尹 洋2
(1. 海軍駐大連地區軍事代表室, 遼寧大連 116000;2. 海軍工程大學電氣工程學院智能工程系,武漢 430033)
為了滿足新型船舶電力系統對故障診斷快速性、準確度的需求,本文以電力系統設備中的交流電動機、同步發電機及變頻器等為研究對象,建立了船舶電力系統監控信息網絡。以此為基礎,構建了故障診斷系統硬件平臺和軟件系統。基于監控信息的船舶電力設備故障診斷系統能改善傳統維修保障方法的許多不足,提高維修保障效率,改變傳統維修保障模式,降低維修保障強度。
監控信息 船舶電力系統 故障診斷 系統設計
0 引言
船舶電力系統在實際運行過程中,由于戰斗破損或操作不當以及設備本身的問題,可能使系統出現各種故障或非正常運行狀態,它們會使電力系統的安全可靠運行受到威脅,嚴重時導致設備的損壞或使整個電力系統的供電中斷,影響戰斗及航行安全。隨著船舶電氣化、自動化程度的日益提高,對船舶電力系統供電的可靠性和生命力提出了更高的要求,要求系統在出現故障或戰損時準確地進行故障診斷,并在盡可能短的時間內最大限度地恢復供電,增強系統的穩定運行能力及連續供電能力[1]。
目前船舶電力系統的管理自動化水平較低,雖具備一定的故障報警功能,但故障診斷不夠及時準確,且誤報、漏報現象時有發生。隨著船舶電力系統的不斷大型化與復雜化,對于新型船舶電力系統而言,傳統做法既不合理也難以實現,并且不可避免地會產生人為故障,系統故障診斷快速性和準確性無法保障,電力系統穩定運行及連續供電能力也會降低。而且,新型船舶電力系統的諸多特性也決定了其故障診斷應該向智能化發展。為滿足新型船舶電力系統對故障診斷與恢復快速性、準確性的需求,須采用智能技術,對船舶電力系統故障診斷技術進行從基礎理論到實際應用的全面研究,提出新的故障診斷與恢復方法與手段,并轉化為實際裝備,以適應艦艇平臺信息化、智能化的發展趨勢。
基于電力監控網絡,對電力系統及設備進行實時狀態監測與故障診斷,是一種新的維修與保障理念與方法,其技術涉及到計算機網絡、信號檢測與處理,模式識別和人工智能等領域和許多高新技術[2-4]。雖然近年來在設備的狀態監測與故障診斷方法的研究上取得了一些研究成果,但在許多方面都還未達到完全實用的水平。本文以電力系統設備中的交流電動機、同步發電機及變頻器等為研究對象,建立了船舶電力系統監控信息網絡,并以此為基礎,構建了故障診斷系統硬件平臺和軟件系統。基于監控信息的船舶電力系統設備故障診斷系統能夠克服傳統的設備維修與保障方法的許多弱點,提高了維修和保障效率,改變了傳統維修保障模式,降低了維修和保障強度。
1 船舶電力系統監控信息網絡構建
構建的船舶電力系統監控信息網絡結構如圖1所示。在網絡系統結構的硬件組成中,傳感器及數據采集裝置(同步向量測量裝置PMU)位于監測現場,通過現場總線、交換機、光纖以太網與監控計算機連接,壓縮的數字信號通過光纖送至集控臺進行顯示。
2 故障診斷系統平臺構建
本文研究對象主要是針對電力系統設備中的交流電動機、同步發電機及變頻器等。同時對發電機、電動機、變頻器支路進行細化,構建了的系統硬件平臺結構如圖2所示。整個硬件平臺由整流器、直流電動機、同步發電機(帶勵磁系統)、逆變器、感應電動機、發電機、負載、精確度電流傳感器、電壓傳感器、轉速、扭矩傳感器、信號采集裝置(PMU)、信號調理裝置、現場總線、交換機、光纖以太網及監控計算機等組成。信息采集系統(PMU)將采集信息送入監控網絡,監控計算機通過交換機從網絡中獲取信息,對網絡信息經過分析、處理、實現對電力系統設備的故障監測與診斷。
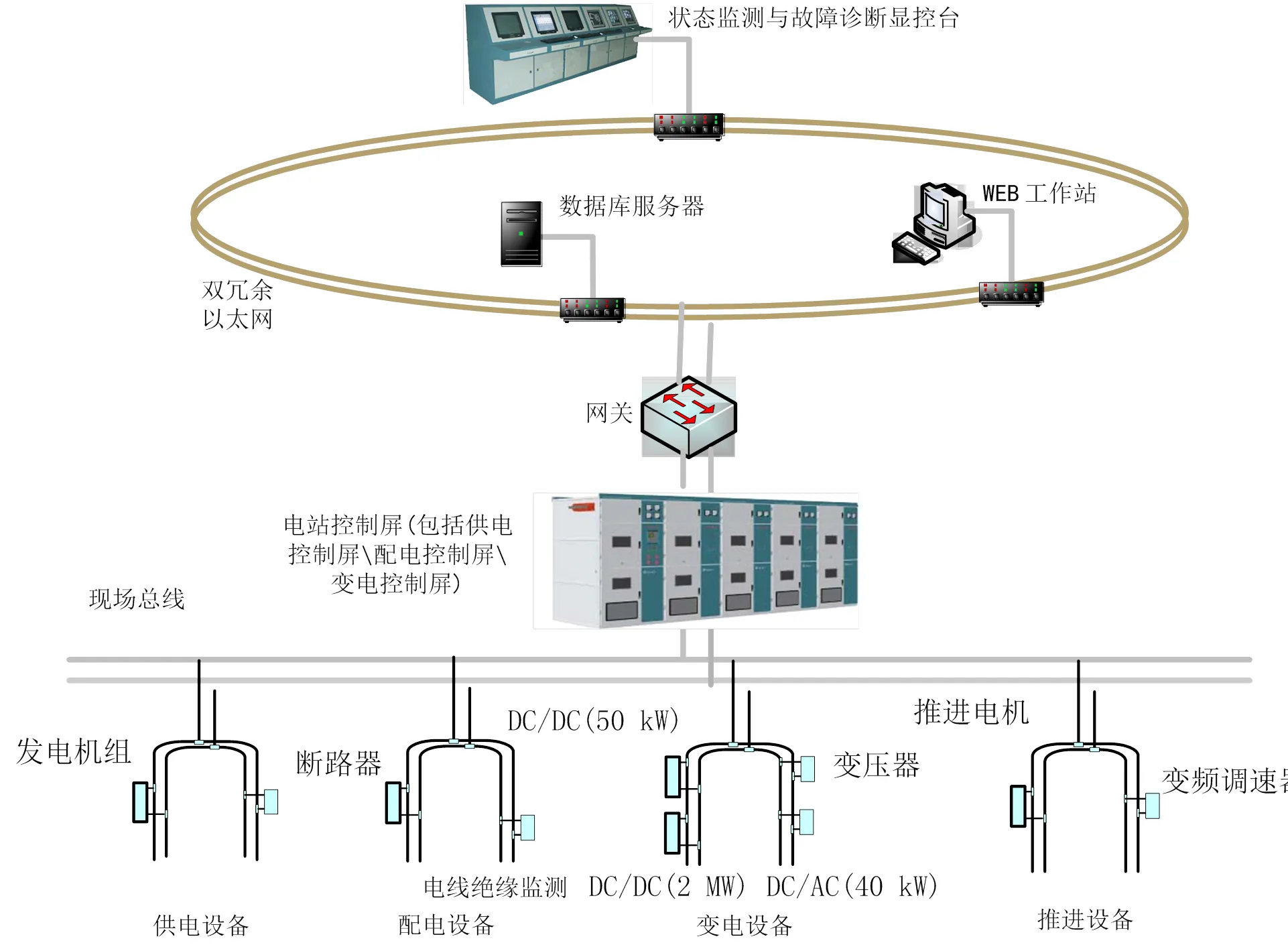
圖1 船舶電力監控網絡系統結構
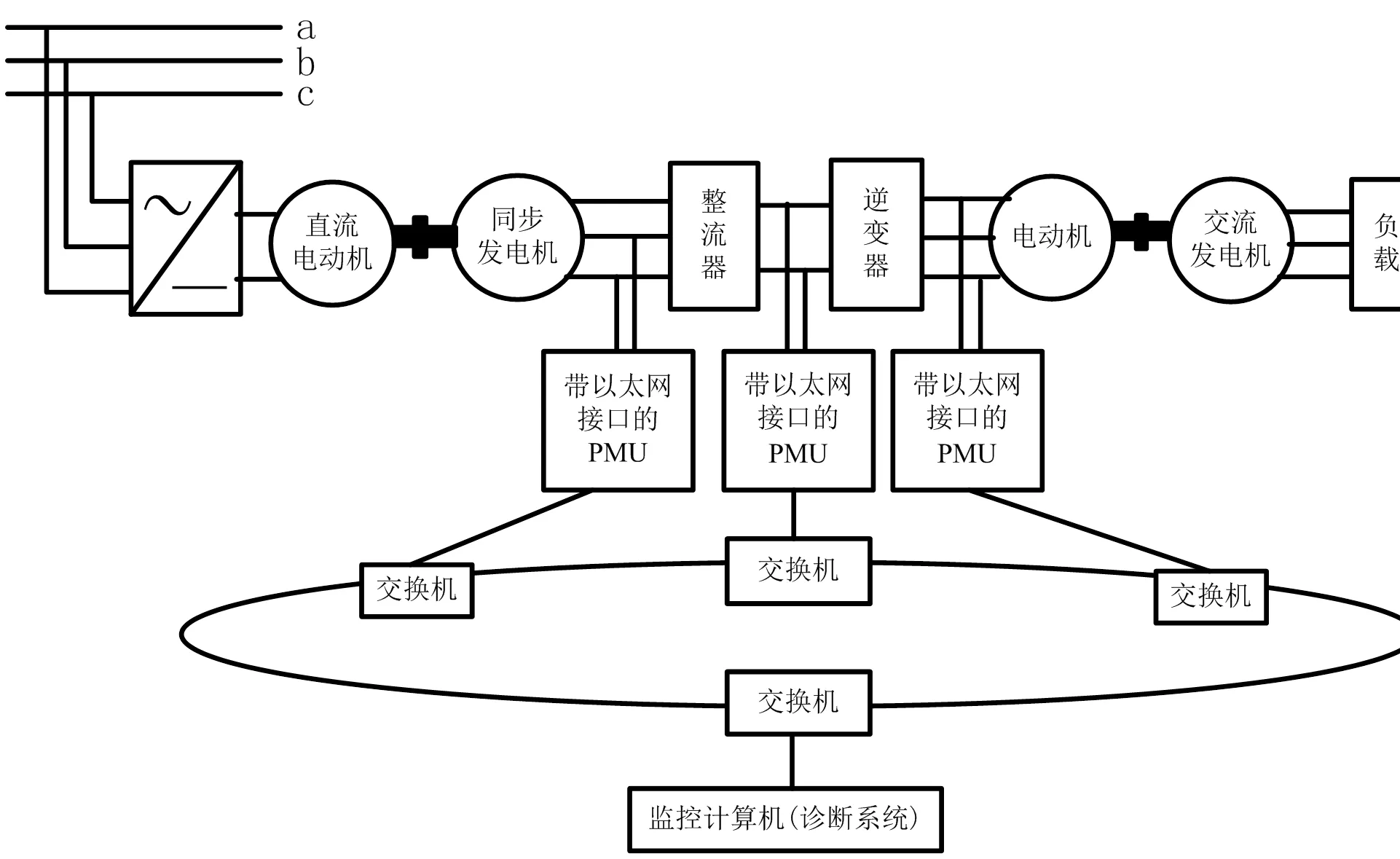
圖2 系統平臺結構圖
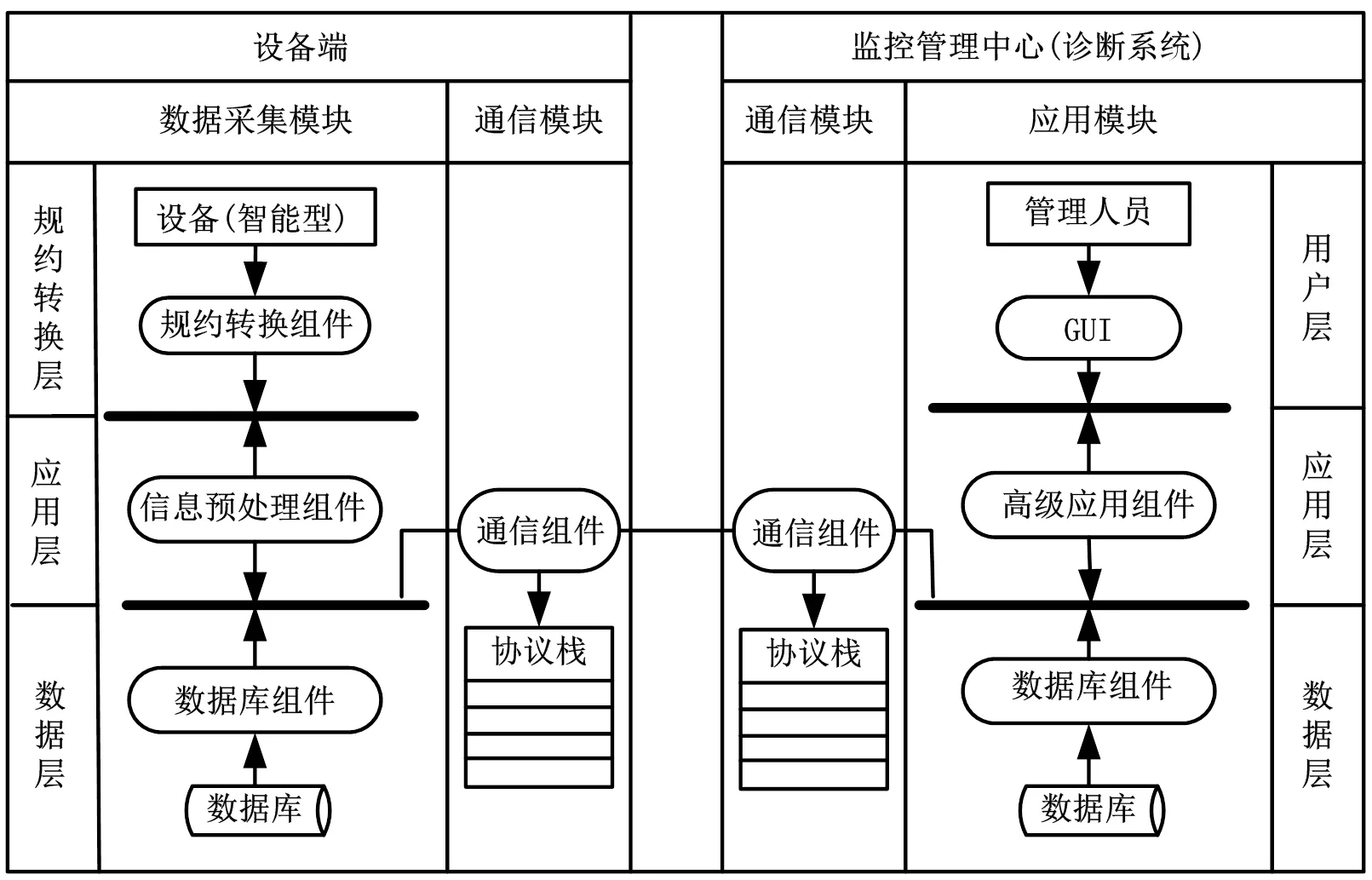
圖3 故障診斷系統軟件層次架構
3 診斷系統軟件體系構建
故障診斷系統的頂層結構采用層次型軟件架構[5],見圖3,層次架構體現在如下三方面。
1)診斷系統軟件架構采用層次架構,含三個層次:用戶層、應用層和數據層。
2)設備端(初級級診斷層)系統軟件架構采用層次架構,含三個層次:規約轉換層、應用層和數據層。
3)通信系統也采用層次結構,設備端應用層和診斷系統應用層分別映射到各自的通信協議棧上。
基于圖3軟件層次架構模型,本課題對故障測試系統進行軟件進行細化,故障檢測信息處理過程如圖4所示。基于PMU裝置的數據采集模塊流程如圖5所示。
a 初始化
信號處理模塊的軟件運行于微控制器上,對整個數據采樣過程等進行控制,并發送采樣數據。在加電啟動并完成自檢后,數據處理模塊和數據采集模塊(PMU)進行通訊測試,若測試失敗,則報錯退出,測試成功進入等待狀態。等待時,數據處理模塊向數據采集模塊發送各種采樣參數,如采樣方式、采樣時間、采樣頻率等。當數據采集模塊得到所有的參數后,對采樣進行設置,然后等待“啟動采樣”指令,完成采樣模塊的初始化。
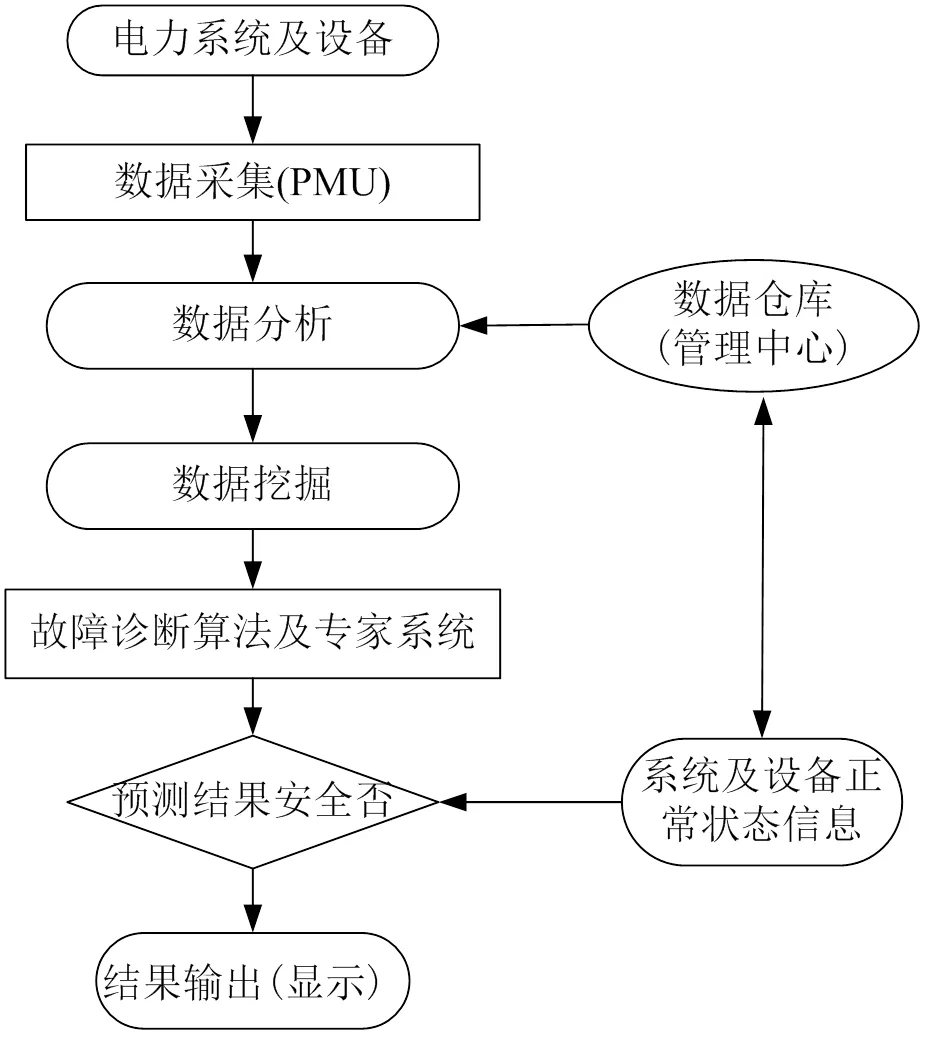
圖4 信息處理過程及軟件工作流程
b 采樣方式
采樣方式有同步采樣和非同步采樣兩種。所謂同步采樣是指采樣頻率隨被采樣信號頻率的變化而變化的,采樣頻率的變化是為了保證在每個采樣周期內得到相同的采樣點數。采取同步采樣方式是為了提高諧波分析的精度。嚴格的同步采樣的實現是相當困難的。非同步采樣方式是指采樣頻率是固定不變的值,在系統開始采樣時確定,并且在整個采樣過程中采樣頻率保持不變。
由于電壓和電流的頻率變化是在一定范圍內小幅變化,因此采用非同步方式同樣可以滿足要求。
c 數據通訊
同步相量測量裝置(PMU)統采用多路同時采樣,每個采樣間隔采集交流三相電壓、三相電流,勵磁機勵磁電流。為提高通訊的速度和效率,數據通訊采用簡單的控制方式,測量結果可以由專用通信接口直接傳送給監控網絡。同步相量測量裝置(PMU)傳送數據速度為480Mb/s,具有足夠的帶寬,使數據無延時地向上傳送,達到數據處理的實時性要求。
監控計算機通過交換機與監控網絡相連,通過TCP/IP協議將檢測數據和診斷結果在網絡中實現共享。
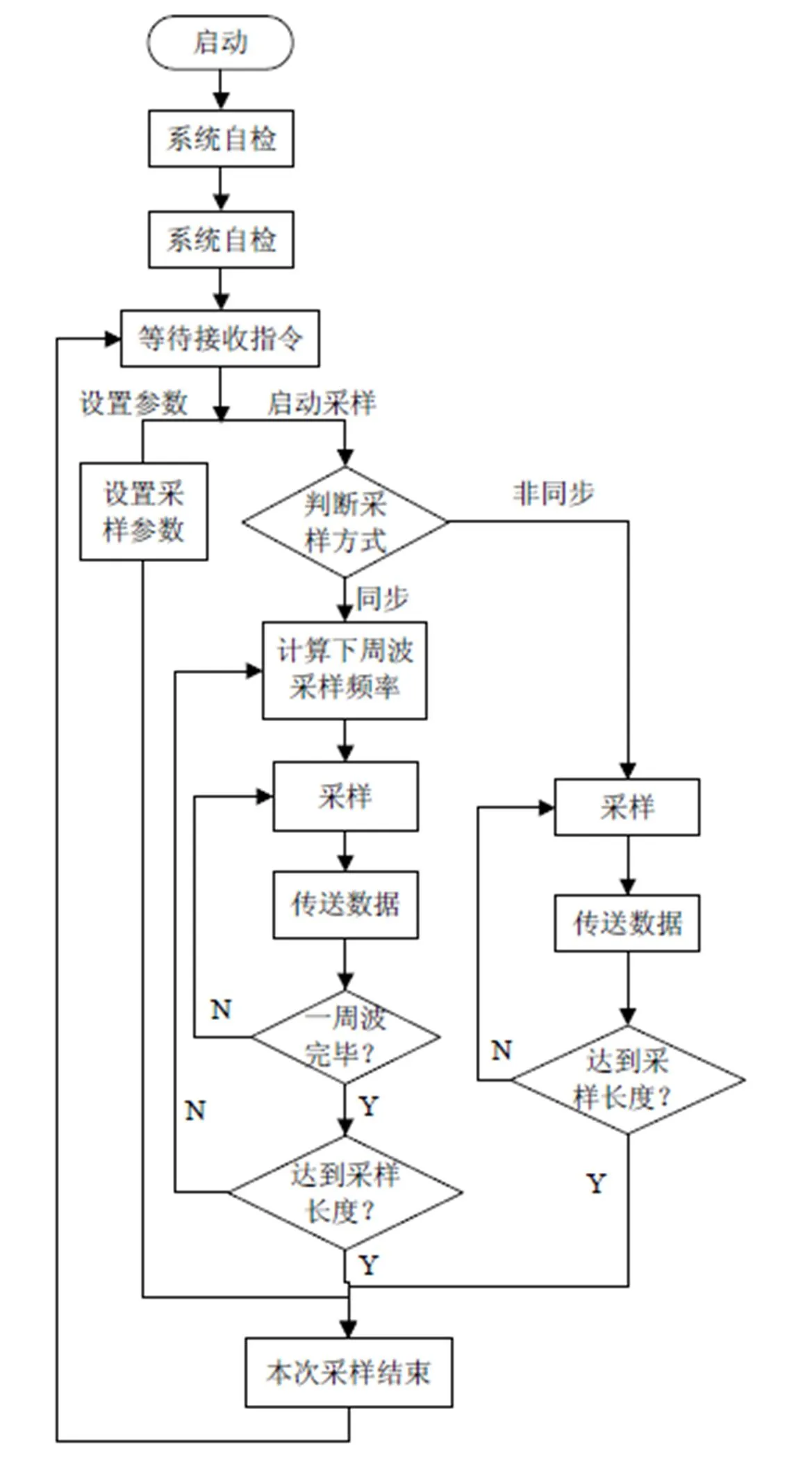
圖5 基于信號采集模塊信號流程
4 基于監控信息的船舶電力系統設備故障診斷系統的實現
診斷系統軟件的核心是信息分析與處理、故障診斷的算法,本項目的分析處理軟件是基于LabVIEW軟件和MatLab軟件開發的。該軟件提供了可靠的、成熟的信號分析處理模塊,可以完成波形測量、信號調理、信號監測、信號處理、信號逐點分析和故障診斷的算法實現。其軟件界面如圖6~圖9所示。

圖6 數據采集界面
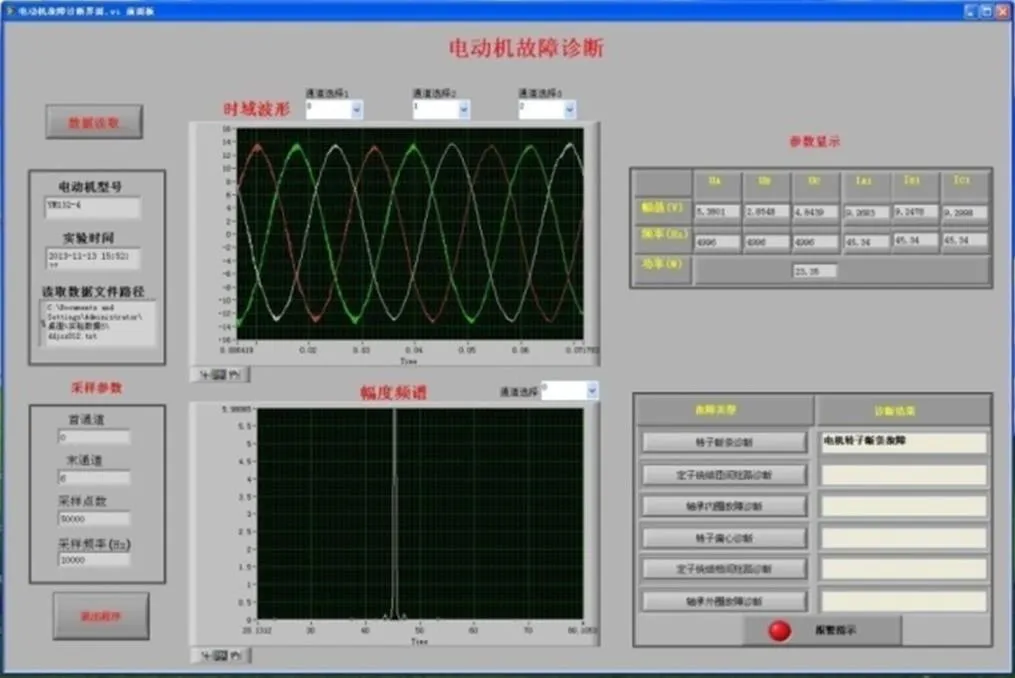
圖7 基于監控信息的電動機故障診斷界面
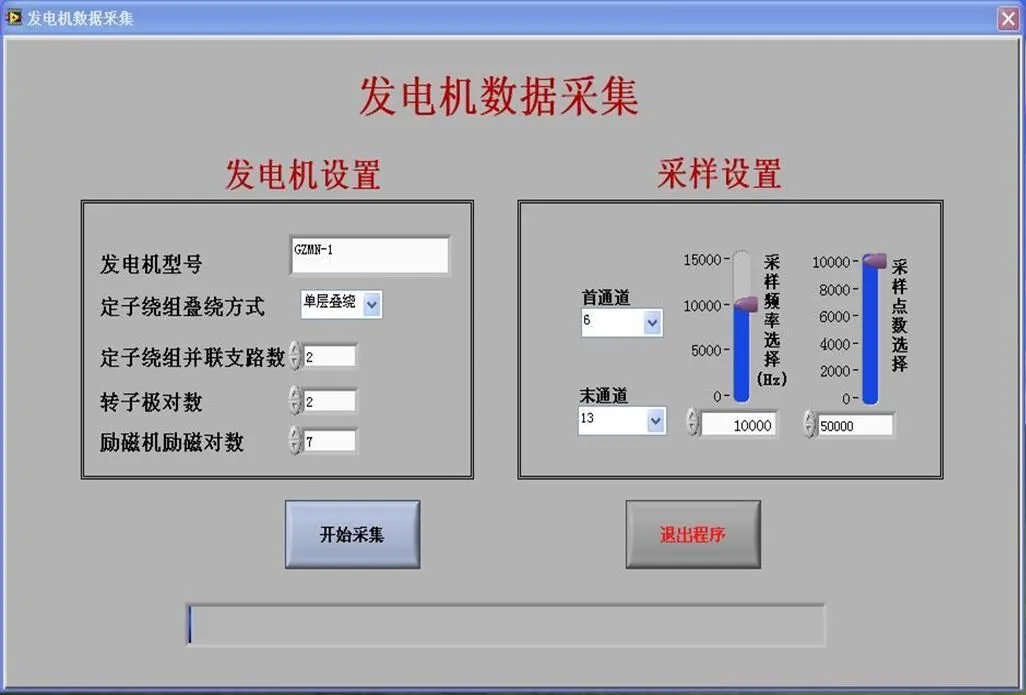
圖8 發電機數據采集界面
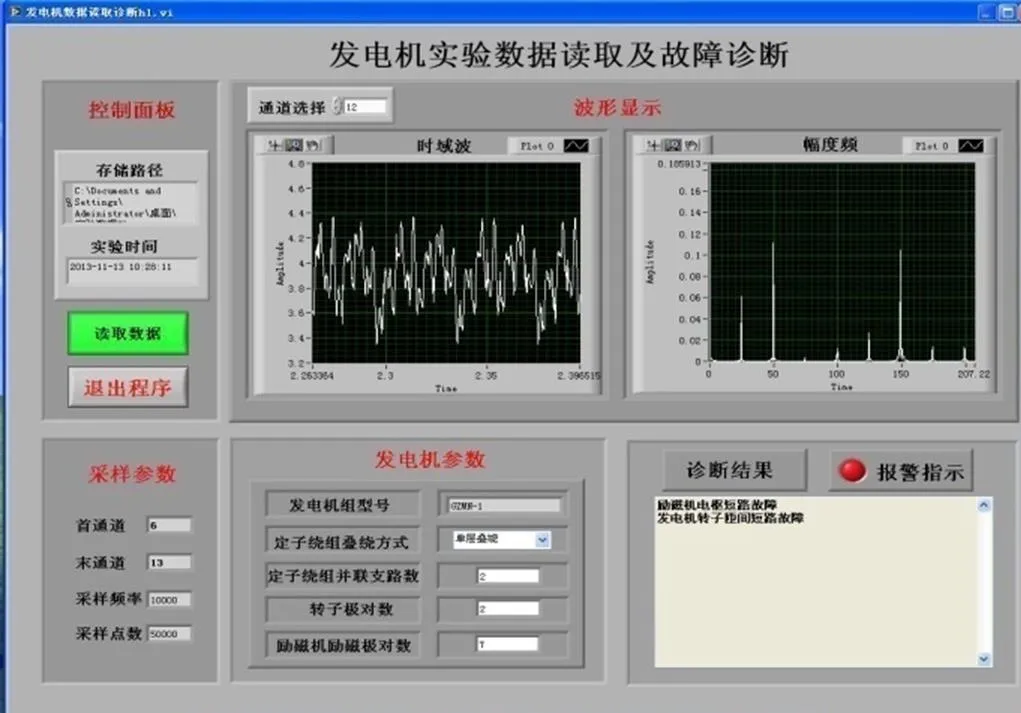
圖9 發電機故障診斷軟件分析界面
5 小結
本文以電力系統設備中的交流電動機、同步發電機及變頻器等為研究對象,建立了船舶電力系統監控信息網絡,并以此為基礎,構建了故障診斷系統硬件平臺和軟件系統。基于監控信息的船舶電力系統設備故障診斷系統能夠克服傳統的設備維修與保障方法的許多弱點,提高了維修和保障效率,改變了傳統維修保障模式,降低了維修和保障強度,可為船舶電力系統可靠運行提供支持。
[1] 梁樹甜, 孟得東. 支持向量機在船舶電力推進系統故障診斷中的應用[J]. 船電技術, 2014, 34(9): 50-54.
[2] 朱歆州,石靈丹. 直流電動機故障診斷系統研究[J]. 船電技術, 2013, 33(1): 35-38.
[3] 朱瑩. 一種新型免疫克隆算法的船舶遠程故障診斷系統[J]. 艦船科學技術, 2017, 39(5A): 55-57.
[4] 唐遠翔,倪秋萍. 基于數據挖掘的船舶汽輪機故障診斷系統研究[J]. 艦船科學技術, 2017,39(6A): 159-161.
[5] 吳文輝, 王燕妮. 故障診斷系統設計[J]. 軟件, 2015,36(5): 105-107.
Design of Fault Diagnosis System for Marine Power Equipment Based on Monitoring Information
Yusheng Li1,Jialin Wang2,Yang Yin3
(1. Military Representative office of Navy in Dalian Area, Dalian116000, China; 2. School of Electronic and Information Engineering, Naval Univ.of Engineering,Wuhan 430033,China)
TM711
A
1003-4862(2017)12-0061-05
2017-09-15
李玉生(1977-),男,工程師。研究方向:艦船自動化。E-mail: reeyan@163.com。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
電力工程技術(2014年1期)2014-03-20 14:19:06
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48