大蒜收獲機鏈桿式輸送鏈的運動分析
2017-02-15 05:10:29河北省農業(yè)機械化研究所有限公司焦海濤高清海張亞振張秀平
河北農機 2017年1期
河北省農業(yè)機械化研究所有限公司 焦海濤 高清海 張亞振 張秀平
大蒜收獲機鏈桿式輸送鏈的運動分析
河北省農業(yè)機械化研究所有限公司 焦海濤 高清海 張亞振 張秀平
河北省農業(yè)機械化研究所有限公司研制的4S-1200型前置式大蒜收獲機,可一次完成大蒜的挖掘、分離和鋪條等作業(yè),能較好地適應我國大蒜種植農藝和生長特性要求,具有操作方便,作業(yè)適應性強,使用可靠性、經濟性較好等特點,減緩了農村勞力不足引起的問題,降低了收獲作業(yè)成本。
挖掘;分離;鋪條
4S-1200型前置式大蒜收獲機主要由限深輪、挖掘鏟、鏈桿式輸送分離部件、集條裝置等組成。
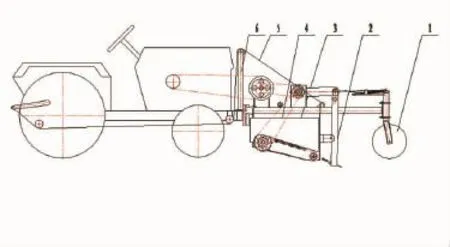
圖1 整機示意圖
機具通過連接架整體安裝在小四輪拖拉機的前保險杠上,利用液壓提升機構通過升降鋼絲繩進行升降控制。振動挖掘鏟將畦內收獲幅寬內大蒜與土一起震動挖掘,挖掘起來的大蒜和土壤的混合物移到挖掘鏟柵條末端時,將被運轉的輸送分離裝置的橫桿托住向后輸送,利用鏈運動不均勻性及振動現(xiàn)象和前寬后窄的集條板,裹夾著大蒜的碎土從鏈桿條的間隙落下,帶莖的大蒜落入尾部并被收攏于拖拉機輪距內。為了在輸送過程中使碎土與大蒜分離開,本文對鏈桿輸送鏈的運動不均勻性及引起的振動進行了分析,并確定了鏈桿輸送鏈的主要參數(shù)。
1鏈桿輸送鏈的運動分析
盡管主動鏈輪在做等角速度運動,但因多邊形效應,鏈條的瞬時速度、瞬時傳動比都在做周期性變化。
1.1 鏈條的瞬時速度

圖2 鏈條速度變化
如圖2所示,若設主動鏈輪節(jié)圓半徑為R1,以等角速度ω1轉動,現(xiàn)以鏈條緊邊的A點作為分析對象,則有:VA=R1ω1
將VA分解為沿水平方向的分速度Vx和垂直方向的分速度Vy。


當β=0時,鏈速最大,Vy為最小:

1.2 運動不均勻性引起的動載荷
從上述運動分析,鏈條在做周期性的變速運動,它使從動輪的角速度也做瞬時周期性變化,鏈條的變速運動必然會引起動載荷,動載荷的大小取決于運動件的質量和加速度。
將Vx=R1ω1cosβ和Vy=R1ω1sinβ對時間求導數(shù),可得:


當β=0時,鏈條前進的加速度最小,垂直鏈條前進方向的加速度最大:
由以上分析,鏈條所受的動載荷與轉速、節(jié)距有關,其中又以轉速影響最大。
2 鏈桿輸送鏈主要參數(shù)的確定
由前面對鏈桿輸送鏈的運動分析,鏈速在做周期性變化的同時,也必然會使鏈桿上所輸送的收獲物做相應的變速運動與振動,在允許的范圍內,利用鏈條運動不均勻性及其振動,使大蒜與碎土分離。
2.1 節(jié)距t的選擇
為了最大限度地使大蒜與土壤分離,同時又盡可能不丟失大蒜,本機選取輸送鏈的節(jié)距t為44.45mm。
2.2 主動鏈輪齒數(shù)z1與轉速n1的選擇
從利用鏈傳動運動不均勻性來增強大蒜與碎土的分離作用出發(fā),鏈輪齒數(shù)宜選偏小的齒數(shù),本機選取的主動鏈輪齒數(shù)z1為9;因本設計的鏈桿輸送鏈主要用于升運和分離功能,試驗表明,分離輸送鏈最佳線速度為1.5~2.0m/s,并應大于作業(yè)時行走速度。因機具選用四輪拖拉機慢Ⅱ擋作業(yè)(行走速度為1.53m/s),因此選取輸送鏈的平均線速度為1.6m/s。
由此可得主動鏈輪的轉速n1為240rpm。
3 蒜頭在鏈桿上可能被拋起的最大高度
4 結論
(1)輸送鏈運動不均勻性及其振動現(xiàn)象,可作為有利因素加以利用。
(2)挖掘物拋起的最大高度與鏈輪節(jié)圓半徑、轉速成正比,利用鏈條運動的不均勻性與振動的關鍵在于合理選擇主要參數(shù)。
(3)本機設計的參數(shù)能順利地拋起挖掘物,并且使鱗莖損傷小。
[1]北京農業(yè)工程大學.農業(yè)機械[M].北京:農業(yè)出版社,1996:200.
[2]賈晶晶,劉俊峰,楊欣,等.振動篩篩分性能的影響因素及分析 [J].河北農業(yè)大學學報,2003,26(1):86-89.
[3]黃新平,龔勃.大型平面振動篩傳動構件有效參量分析[J].塔里木農墾大學學報,1996,8(2):82-86.
[4]鄭志峰.鏈傳動技術的發(fā)展與應用.北京:機械工業(yè)出版社,1975.
[5]楊大平,劉保華.帶振動篩板脫粒機的研究[J].湖南農業(yè)大學學報(自然科學版),2003,29(2):163-164.
[6]呂金慶,李世柱,李國民等.馬鈴薯挖掘機升運器的設計研究[J].農機化研究,2004,7(4):108-111.
焦海濤,男,1986年出生,助理研究員,研究方向:農業(yè)機械化。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
電子制作(2018年18期)2018-11-14 01:48:24
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
計算物理(2014年2期)2014-03-11 17:01:44
