基于簡便約束粒子群優化算法的空空導彈μ-PID控制器設計
2017-02-20 01:41:44張民陳亮陳欣
兵工學報 2017年1期
張民,陳亮,陳欣
(南京航空航天大學 自動化學院, 江蘇 南京 211106)
基于簡便約束粒子群優化算法的空空導彈μ-PID控制器設計
張民,陳亮,陳欣
(南京航空航天大學 自動化學院, 江蘇 南京 211106)
針對現有約束粒子群優化(PSO)算法存在的算法復雜、應用范圍受限、優化效果不佳等缺陷,提出一種新型約束粒子群算法。該算法采用目標函數替換的方法將約束優化問題轉化為非約束優化問題,具有簡便易用的優點。通過典型測試函數測試并和其他具有代表性的約束PSO算法進行對比,表明該算法在處理約束優化問題上的優越性。為了驗證該算法應用于工程的可行性,以樣例導彈縱向模型為對象,針對經典Raytheon控制結構,采用該算法設計了μ-PID控制器。仿真結果表明,樣例導彈控制器可以在滿足多種時域指標的同時具有良好的魯棒性能,達到了設計指標要求,驗證了所提出算法的有效性。
飛行器控制、導航技術;空空導彈;粒子群優化;約束優化;魯棒性
0 引言
近年來,采用非線性優化算法來解決控制器優化設計問題的研究已逐步進入應用階段[1-2]。Kennedy等[3]在1995年提出的粒子群優化(PSO)算法,作為其中有代表性的一種群體智能優化算法,其具有如下優點:1) 算法結構簡單,只需要很少的代碼就可以實現該算法;2) 算法程序在計算量和內存占用方面很小,有利于在計算機上實現復雜系統的優化;3) 與某些優化算法不同,PSO算法對目標函數沒有諸如線性、可微、凸集等要求;4) 算法對粒子的初值不敏感。目前,PSO算法已被廣泛應用于多目標優化、神經網絡系統訓練、模糊系統控制和決策支持等各領域[1-2, 4]。
標準的PSO算法無法處理帶等式或不等式約束條件的優化問題,這限制了PSO算法在實際工程中的應用。為了處理約束優化問題,大量的改進算法相繼被提出[2, 4],Michalewicz等[5]在1996年共同提出了罰函數PSO算法,Bouallègue等[6]在2011年將其應用于定結構H∞控制器的設計中。為了解決傳統的罰函數PSO算法難以選取合適的懲罰因子的缺陷,蔡海鸞等[7]在2015年提出了一種新的自適應懲罰函數法,該方法通過依據每一步迭代過程中違背約束條件粒子所占比例來動態調整懲罰因子,從而解決了懲罰因子選擇困難問題,成為現今廣泛被采用的一種新型懲罰函數法。該算法的不足之處在于其收斂性能對于需調參數α有很強的依賴性,而該參數的選擇需要依據工程人員豐富的經驗。Sedlaczek等[8]在2006年提出了增廣拉格朗日PSO(ALPSO)算法來處理約束優化問題,Kim等[9]在2008年將其應用于PID控制器的設計中。ALPSO算法的不足之處在于為了處理約束條件而引入了拉格朗日算子,這增加了算法的復雜性,并且該方法還對目標函數有連續、可微的要求,限制了該方法的應用范圍。上述算法是PSO算法在處理約束優化問題中目前具有代表性的方法。
本文提出了一種采用PSO算法處理約束優化問題的新穎且簡便易用的算法,該方法的主要優點是在處理約束條件時沒有引入任何新的需調參數,并且具有優良的搜索性能,對目標函數也沒有連續可微等要求。利用典型測試函數[10]對該簡便約束PSO算法在處理約束優化問題上的性能進行了綜合測試,并和其他算法進行比較。同時,針對傳統魯棒控制方法如H∞方法、μ綜合方法設計的導彈控制器存在的階次過高、難以實現等問題[11],將所提出的簡便約束PSO算法應用到導彈控制律的優化設計中,設計了一種能夠滿足現代空戰對于導彈魯棒性能要求的μ-PID定結構控制器。仿真結果表明所設計的控制器在滿足多種時域指標的同時具有良好的穩定魯棒性和性能魯棒性,從而驗證了簡便約束PSO算法應用于工程實際的可行性。
1 PSO算法
PSO算法是由美國社會心理學家Kennedy等[3]在1995年共同提出的一種進化計算技術,它是一種通過模擬鳥類群體行為進行建模與仿真研究而發展起來的一種基于群體協作的隨機搜索算法,屬于群體智能搜索算法的一種,也稱為微粒群算法。該算法原理是從一組隨機的初始值出發,采用基于鄰域的搜索技術,通過迭代來尋找最優解,在每一次迭代中,粒子通過個體極值(粒子本身找到的最優解)和群體極值(種群目前找到的最優解)來更新自己。由于PSO算法本身結構簡單,并在多種復雜非凸優化問題的應用中表現優異,近年來引起了越來越多的關注。
1.1 標準PSO算法
在PSO算法中,每一個優化問題的解作為一只單個的鳥,或稱為粒子,粒子的屬性包括其位置x和速度v. 每個粒子在多維空間中依據個體經驗和群體中其他粒子的經驗來動態調整自身移動的軌跡與速度。在第k次迭代中,第i個粒子xi=(xi,1,xi,2,…,xi,m)∈Rm依據以下公式對位置和速度進行調整:
(1)
(2)
(3)
(5)
cw,max和cw,min分別為cw的最大值與最小值,kmax為最大進化代數。
1.2 約束PSO算法
PSO算法最初是作為一種非約束優化算法被提出的,然而在大量的工程實踐中,有相當多的應用屬于要求滿足一定不等式約束條件下的優化問題。典型的約束PSO算法有自適應懲罰函數PSO算法和ALPSO算法,然而這兩種算法均有一些如前所述不足之處。為了克服這些不足,本文提出了一種新型簡便易用的約束PSO算法。
一般約束優化問題可以描述為
(6)
式中:函數h(x)=[h1(x),h2(x),…,hn(x)],(Rm→Rn)表示約束條件;F表示所有可行的區域,在本文中,假設F為非空集合。
本文采用如下一種新穎簡便的方法將(6)式所描述的約束優化問題轉化為(7)式所示的非約束優化問題,在該過程中不需要增加任何新的算法參數。
(7)
式中:fm(x)定義為
(8)

本文提出的算法最大的優勢在于其簡便性,它不需要像ALPSO算法那樣要求目標函數連續可微,也不需要像自適應罰函數法那樣增加新的需調參數。在后續內容中,該算法將與ALPSO算法、罰函數法進行性能比較。
2 算法性能測試
目前,非線性優化算法的優劣尚不能從理論上進行證明,通常只能通過測試函數的實測結果來進行比較。為了驗證所提出的約束PSO算法的性能,在本部分內容中采用了多個標準測試函數[10]來對其性能進行全面測試與驗證。在文獻[10]中包含24個標準測試函數,我們選擇了其中帶不等式約束的單目標優化問題共12個測試函數,這些測試函數在約束優化算法的性能測試中被廣泛采用。
測試程序在Matlab 7.8環境下運行,采用一臺Intel i5 CPU PC機,內存為4 GB. 每個任務運行30次,算法停止的條件是達到最大進化代數1 000. 同時為了與前述自適應罰函數法PSO算法、ALPSO算法進行對比,對這兩種算法也進行了同樣的測試。在進行比較分析時,粒子群算法參數取為:粒子數量 30;粒子維數依測試函數;粒子最大移動速度vmax,d=xmax,d/2;學習因子:cp=2,cs=2;慣性系數最大與最小值:wmax=0.9,wmin=0.4;最大搜索代數: 1 000.
測試結果如表1所示。本文提出的簡便約束PSO算法在處理帶約束的優化問題中具有優越的性能,對測試函數尋優的成功率明顯高于自適應罰函數PSO算法和ALPSO算法,并且得到的最終優化結果及其分布特性也優于上述兩種算法。
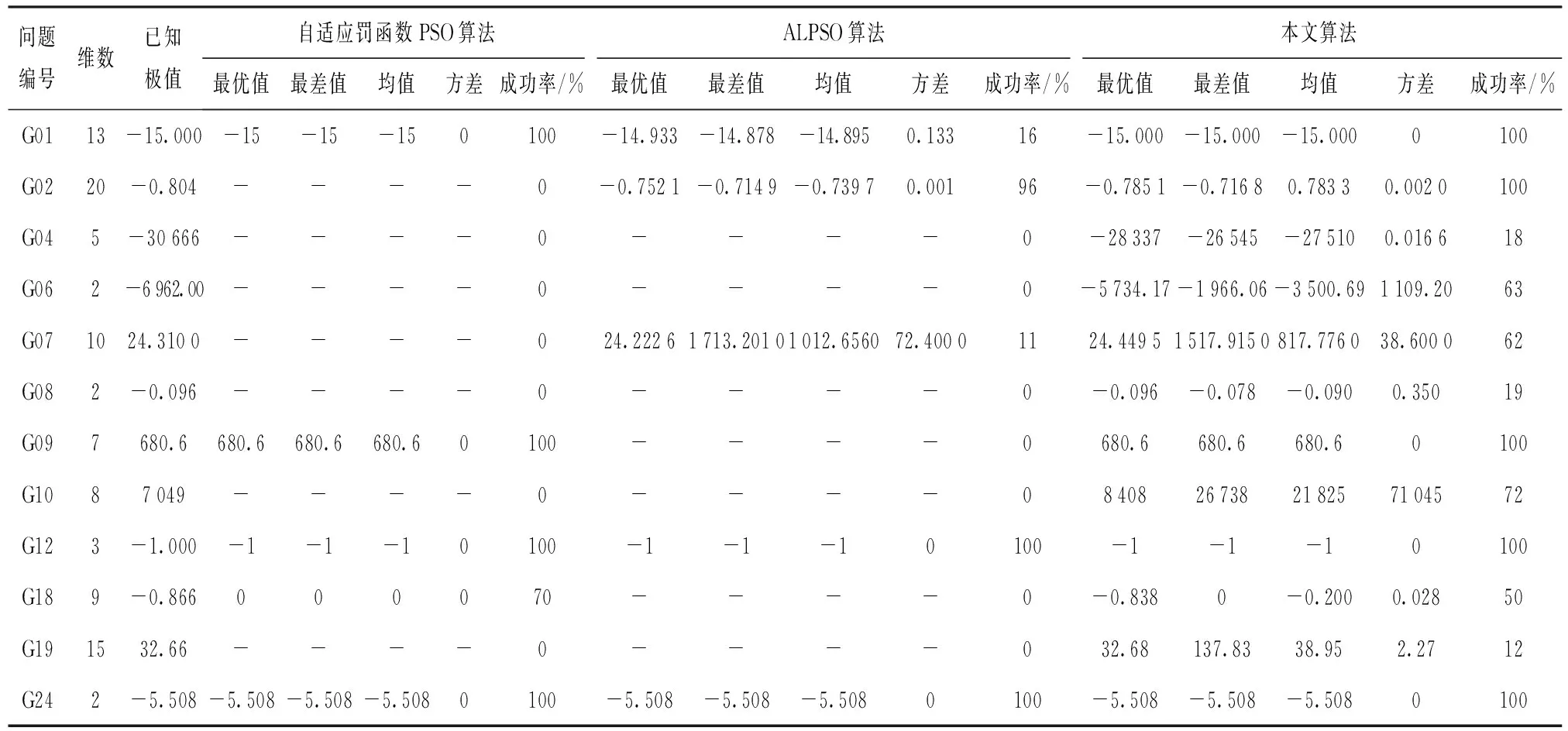
表1 3種約束優化算法測試結果Tab.1 Test results of three constrained optimization algorithms
3 導彈μ-PID控制應用
3.1 問題描述
3.1.1μ分析方法
結構奇異值μ是一種線性代數工具,用來定量的表征結構化不確定性對線性動態系統穩定性及性能的影響。相比于H∞方法,μ綜合方法可以同時分析控制系統的魯棒穩定性和魯棒性能[11-14]。
對任意多輸入不確定線性閉環系統,總可以由圖1所示的結構來描述。其中M代表系統傳遞函數矩陣,由控制器和控制對象構成。
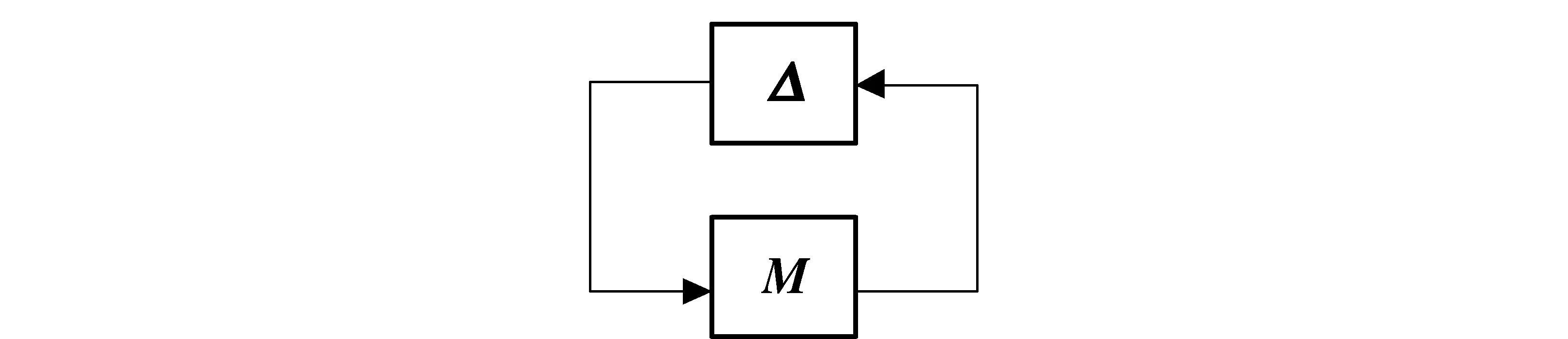
圖1 標準反饋控制結構Fig.1 Standard feedback control structure
Δ代表模型不確定性,即作為控制對象的數學模型與實際對象存在的差異,且有
(9)
(10)

若系統不確定性Δ滿足(10)式,則系統傳遞函數矩陣M的結構奇異值定義為
(11)
直接按照(11)式來求解結構奇異值μ是非常困難的,通常采用的是一種逼近方法。首先計算μ值的上下界,當上下界之差足夠小時,取其為近似值,該方法稱為“D-K”迭代法,由Doyle等[15]在1985年提出。
3.1.2μ-PID控制器設計問題
μ分析問題可由圖2表示。
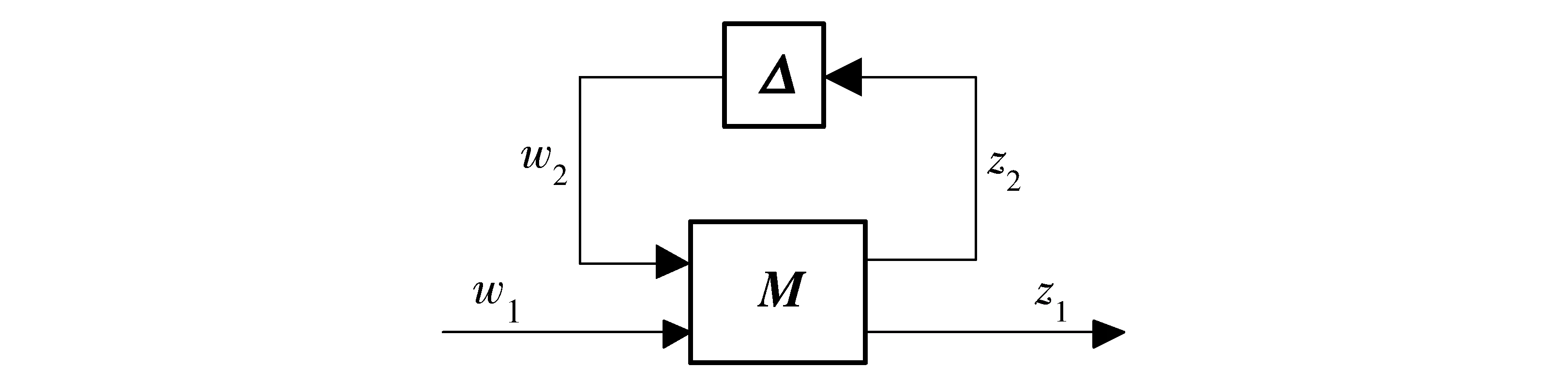
圖2 μ分析問題結構方塊圖Fig.2 Block diagram of μ analysis
在此結構中,M代表廣義控制對象以及控制器,w1表示外部輸入信號,z2和w2分別表示模型不確定性的輸入和輸出信號,z1表示控制輸出信號。此時系統∑(s,x)可分解為
(12)
在本文中,基于約束優化的μ-PID控制器設計可以描述為

(13)
式中:K(s,x)表示控制器,x∈Rm為控制器參數。搜索其最小值并滿足由時域響應指標組成的約束條件。
3.2 導彈控制設計與仿真
樣例導彈采用基于多工作點線性化模型的控制律設計,6自由度非線性模型驗證的方法,因此本文中控制律設計仍以線性化模型為設計對象。以樣例導彈在15 000 m高度、馬赫數為2.8、40°攻角下的特征工作點縱向通道狀態空間模型為例,其狀態方程為
輸出方程為
式中:u、w分別為縱向和法向速度;α為攻角;q為俯仰角速率;az為法向加速度;δe為等效升降舵偏角。
導彈的定結構控制器可以有各種形式,如姿態控制器、迎角控制器和過載控制器等,每種控制器依據控制對象本身的特性和控制需求還可以細分為更多的回路控制結構。不失一般性,本文以經典Raytheon駕駛儀控制結構為例,其縱向控制結構如圖3所示。
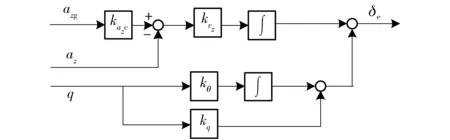
圖3 樣例導彈縱向Raytheon駕駛儀控制結構Fig.3 Sample missile longitudinal Raytheon control structure
圖3中各項參數分別為:kazc為法向加速度指令增益系數;kvz為法向速度增益系數;kθ為俯仰角增益系數;kq為俯仰角速率增益系數;Azg為給定法向加速度。
樣例導彈縱向通道所需滿足的時域性能指標如表2所示。
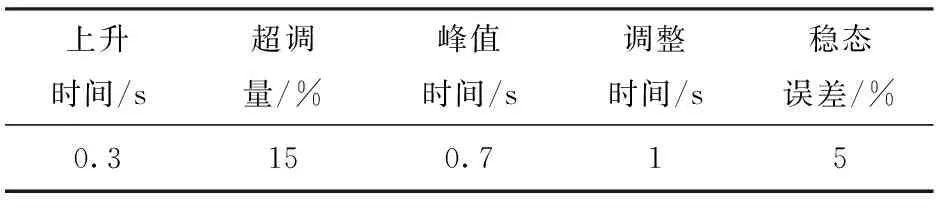
表2 縱向通道階躍響應性能指標Tab.2 Longitudinal channel step response performance index
采用如上所述性能指標函數和約束條件,基于3種不同PSO算法的優化結果如表3~表5所示。表3~表5中的Pm、Gm分別為相角裕度和幅值裕度。
本文方法的最終設計結果體現在表5中,并且由表3~表5可知,罰函數PSO算法所得到的3種μ值均最大,μ最小值大于1,表明該優化方法所得到的控制器魯棒性較差;ALPSO算法總體性能次之;本文提出的簡便約束PSO算法顯然具有最佳的性能,并且傳統的幅值和相角裕度指標也驗證了這一結果。基于上述3種PSO算法的目標函數收斂性曲線如圖4~圖6所示。

表3 罰函數PSO算法優化結果Tab.3 Statistical analysis of optimized results: PSO with adaptive penalty functions-design case

表4 ALPSO算法優化結果Tab.4 Statistical analysis of optimizated results: ALPSO-design case

表5 本文算法優化結果Tab.5 Statistical analysis of optimizated results: the proposed PSO-design case
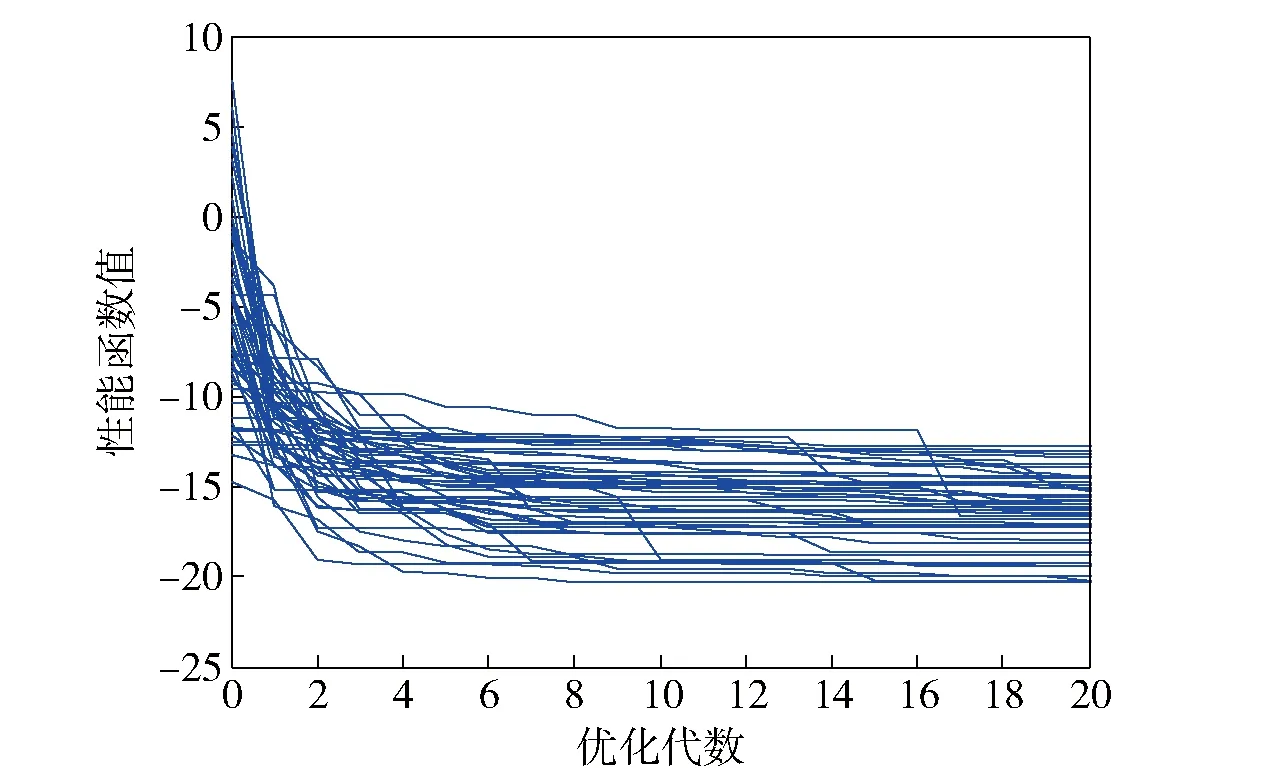
圖4 罰函數PSO算法目標函數收斂性曲線Fig.4 Objective function convergence curves-PSO with adaptive penalty function
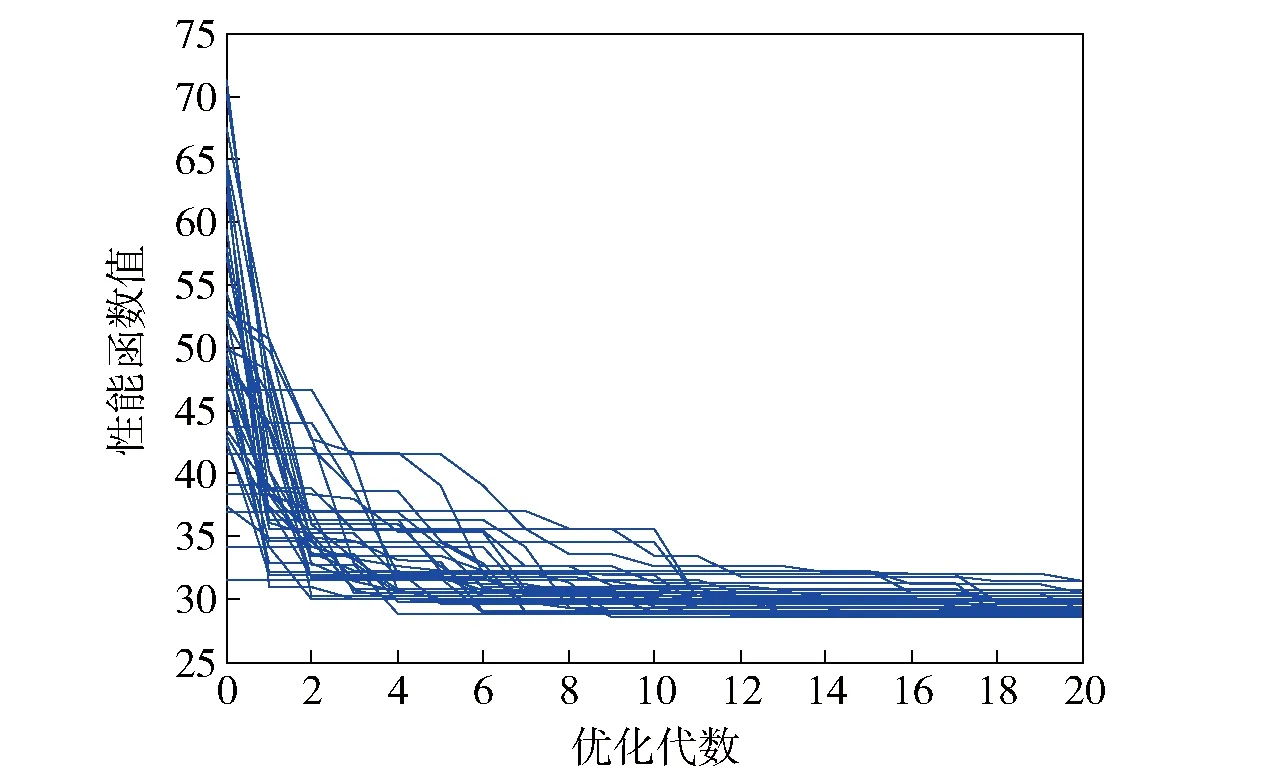
圖5 ALPSO算法目標函數收斂性曲線Fig.5 Objective function convergence curves-ALPSO
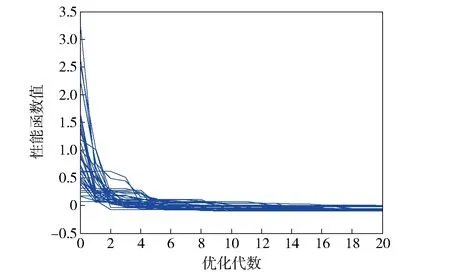
圖6 本文算法目標函數收斂性曲線Fig.6 Objective function convergence curves-PSO presented in the present paper
由圖4~圖6明顯可見,相比于罰函數PSO算法和ALPSO算法,本文提出的簡便約束PSO算法在設計樣例導彈縱向通道控制律過程中具有最好的統計收斂特性。
在簡便約束PSO算法得到的50次結果中,選取最優值結果:kazc=0.97,kvz=0.2,kθ=2.44,kq=0.41作為控制參數,并且在圖7所示的俯仰通道閉環系統中,wi為理想相應權函數,wp為模型性能指標權函數,win為模型不確定性權函數,wn為噪聲干擾權函數,Δin為模型不確定性,du為模型不確定性輸入的干擾信號,dn為噪聲輸入的干擾信號,zazo為az的輸出信號測量值。權函數取值參見參考文獻[16]。
對閉環控制系統的頻域和時域性能分析如下:
1)頻域性能分析。
①魯棒穩定性分析。在圖7所示的俯仰通道閉環系統中,令外輸入為0,僅考慮輸入端乘型不確定性Δin作用下zazo的響應。如圖8(a)所示為從du到zazo的傳遞函數的結構奇異值上界曲線。由圖8(a)中可見結構奇異值均在0.3以下,表明系統具有良好的魯棒穩定性。
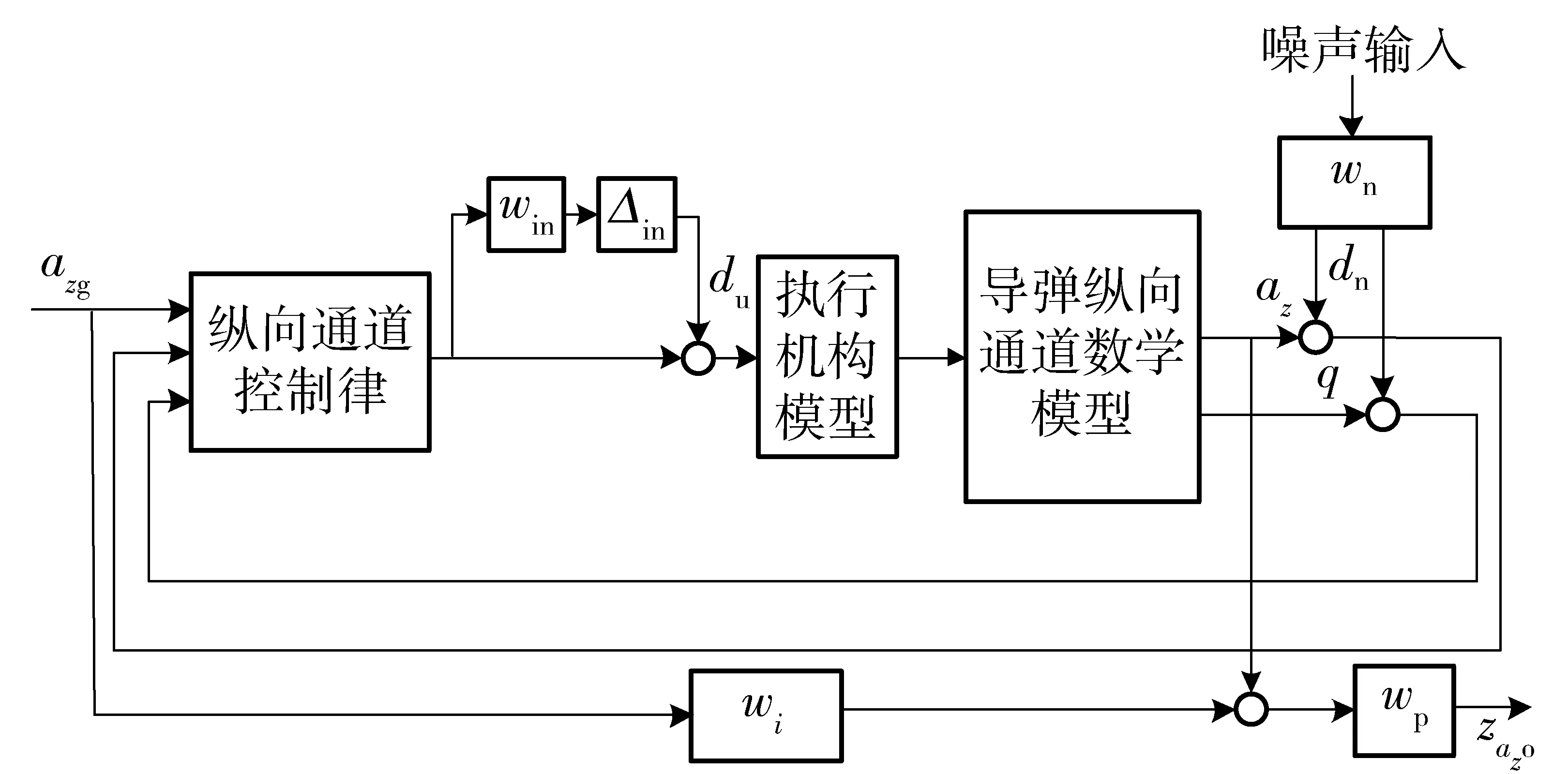
圖7 閉環系統魯棒性驗證仿真結構Fig.7 Closed-loop system robustness verification simulation structure
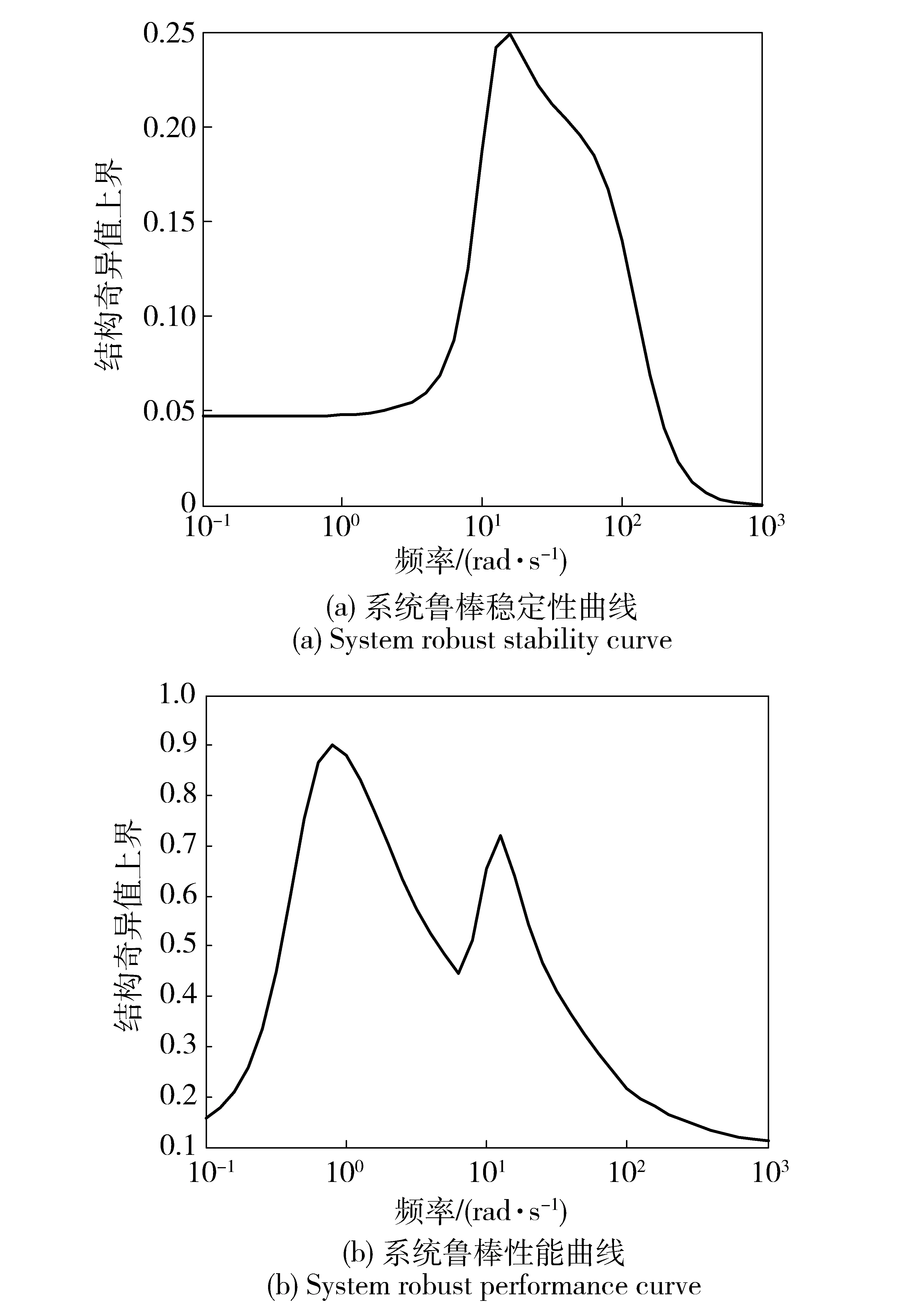
圖8 系統魯棒曲線Fig.8 System robust curve
②魯棒性能分析。考察在外輸入和輸入端乘型不確定性同時作用下系統的性能。如圖8(b)所示,結構奇異值均在1以下,表明系統的魯棒性能也滿足指標要求。
2)時域性能分析。
①標稱系統單位階躍響應。在圖7所示的俯仰通道閉環系統中,令Δin=0且擾動dn=0,僅考慮俯仰通道過載命令azg=1作用下系統的階躍響應。從圖9可見,系統的標稱性能滿足表2所示的時域性能指標。
②攝動系統單位階躍響應。在外輸入和輸入端乘型不確定性同時作用下系統的階躍響應如圖10所示,可知系統在攝動下的性能仍然滿足表2所示的時域性能指標,從而印證了頻域分析的結果。
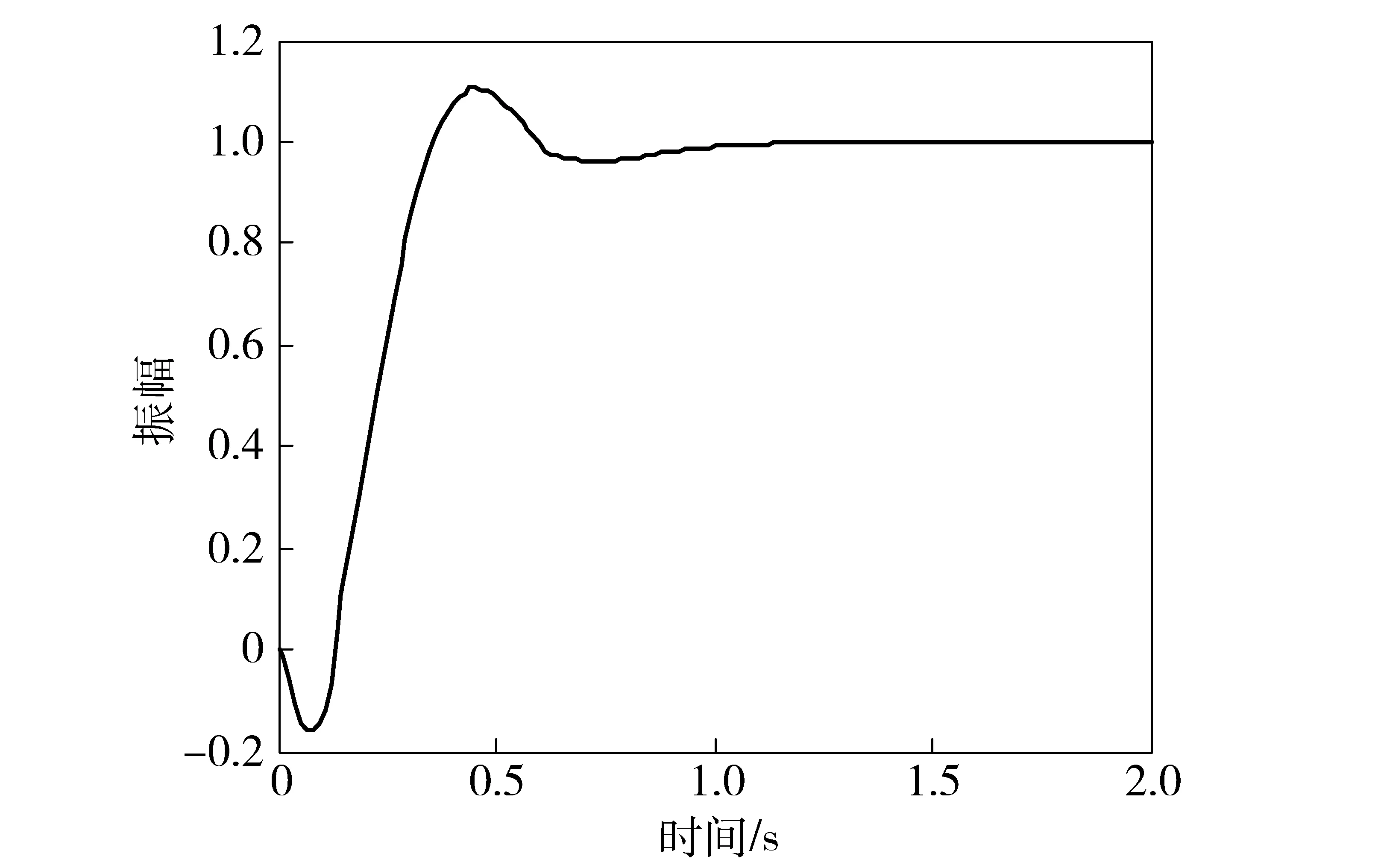
圖9 標稱系統階躍響應曲線Fig.9 Nominal performance response curve
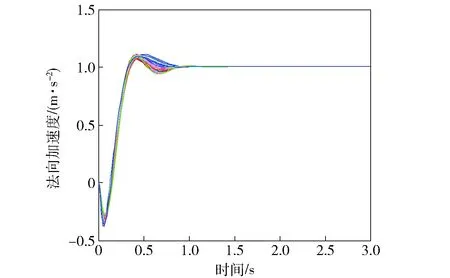
圖10 攝動系統階躍響應曲線Fig.10 Perturbation system performance curves
4 結論
1)本文提出了一種新穎且簡便易用的約束PSO算法,并將其應用到導彈駕駛儀定結構魯棒控制器的設計中。通過典型測試函數的測試,并與其他約束優化PSO算法進行對比,表明了本文提出的算法在解決約束優化問題中的優越性。
2)以某樣例導彈縱向通道數學模型為控制對象,采用該簡便約束PSO算法設計了μ-PID控制器,并對其時域性能和魯棒性進行了分析,結果各項性能指標滿足要求,從而驗證了該算法的有效性。在本文中,僅對樣例導彈縱向通道控制器進行了設計,在建立了μ-PID魯棒控制器設計方法的基礎上,將其推廣到導彈的三通道的聯合設計是下一步值得研究的工作。
References)
[1] 楊希祥, 降振宇, 張為華. 基于粒子群優化的固體運載火箭上升段彈道優化設計研究[J]. 宇航學報, 2010, 31(5): 1304-1309. YANG Xi-xiang, JIANG Zhen-yu, ZHANG Wei-hua. Solid rocket based on particle swarm optimization on the ballistic optimization design research [J]. Journal of Aerospace, 2010, 31(5):1304-1309.(in Chinese)
[2] 傅陽光, 周成平, 丁明躍. 基于混合量子粒子群優化算法的三維航跡規劃[J]. 宇航學報, 2010, 31(12): 2657-2664. FU Yang-guang, ZHOU Cheng-ping, DING Ming-yue. Quantum particle swarm optimization algorithm based on hybrid 3D path planning [J]. Journal of Aerospace, 2010, 31(12):2657-2664. (in Chinese)
[3] Kennedy J, Eberhart R. Particle swarm optimization[C]∥IEEE International Joint Conference on Neural Networks. Perth, Austra-lia:IEEE, 1995:1942-1948.
[4] Afshar M H. Large scale reservoir operation by constrained particle swarm optimization algorithms [J]. Journal of Hydro-environment Research, 2012, 6(1):75-87.
[5] Michalewicz Z, Dasgupta D, Riche R, et al. Evolutionary algorithms for constrained engineering problems[J]. Computers & Industrial Engineering, 1996, 30(4):851-870.
[6] Bouallègue S, Haggège J, Benrejeb M. Particle swarm optimization-based fixed-structureH∞control design[J]. International Journal of Control, Automation, and Systems,2011, 9(2):258-266.
[7] Cai H L. A new adaptive penalty function in the application of genetic algorithm[J]. Journal of East China Normal University:Natural Science, 2015, 6(6):36-52.
[8] Sedlaczek K, Eberhard P. Using augmented Lagrangian particle swarm optimization for constrained problems in engineering[J]. Structural and Multidisciplinary Optimization, 2006, 32(4):277-286.
[9] Kim T H, Maruta I, Sugie T. Robust PID controller tuning based on the constrained particle swarm optimization[J]. Automatica, 2008, 44(4):1104-1110.
[10] Liang J J, Runarsson T P, Mezura-Montes E, et al. Problem de-finitions and evaluation criteria for the CEC 2006 special session on constrained real-parameter optimization[EB/OL]. [2006-09-18]. http:∥www.lania.mx/~emezura/util/files/tr_cec06.pdf.
[11] 鄭建華, 楊滌. 魯棒控制理論在傾斜轉彎導彈中的應用[M]. 北京:國防工業出版社, 2001. ZHENG Jian-hua, YANG Di. Robust control theory in the application of bank missile[M]. Beijing: National Defense Industry Press, 2001. (in Chinese)
[12] Doyle J C. A review ofμfor case studies in robust control[C]∥10th IFAC Triennial World Congress. Munich, FRG:Pergamon Press, 1988:365-370.
[13] Li T J, Ma Y J. Robust vibration control flexble tensegrity structure viaμsynthesis[J]. Structure Control and Health Monitoring, 2013, 20(2):173-186.
[14] 李偉杰,沈作軍. 基于μ分析的高超聲速飛行器再入軌跡評估[J]. 飛行力學, 2016, 34(4):50-53, 58. LI Wei-jie, SHEN Zuo-jun. An evaluation of hypersonic vehicle reentry trajectory based onμ-analysis[J]. Flight Dynamics, 2016, 34(4):50-53, 58.(in Chinese)
[15] Doyle J C, John C, Chu C C. Matrix interpolation andH∞performance bounds[C]∥American Control Conference. Boston, MA:IEEE,1985:129-134.
[16] 臧月進. 空- 空導彈μ綜合控制器設計與研究[D]. 南京:南京航空航天大學, 2012. ZANG Yue-jin. The design and research ofμ-Air-to-air Missile integrated controller[J]. Nanjing:Nanijng University of Aeronautics and Astronautics, 2012.(in Chinese)
A Simple Constrained PSO Algorithm and Its Application inμ-PID Controller Design for Missile Autopilot
ZHANG Min, CHEN Liang, CHEN Xin
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, Jiangsu, China)
The existing constrained particle swarm optimization(PSO) algorithms have the disadvantages of algorithm complexity, limited application and poor optimization. A kind of novel constrained particle swarm optimization algorithm is proposed. The proposed algorithm converts a constrained optimization problem into an unconstrained one using the method of objective function substitution method. It is tested with the typical test functions. The algorithm shows its superiority in handling the constrained conditions clearly compared with other constrained PSO algorithms. In order to verify the feasibility of the proposed constrained PSO algorithm applying in the engineering, the proposed algorithm is used to design aμ-PID fixed-structure robust controller by taking a sample missile longitudinal model for the classical Raytheon control structure. The simulated results indicate that the sample missile controller can not only satisfy a variety of time domain indexes but also have strong robustness, and the proposed algorithm is effective.
control and navigation technology of aircraft; air-to-air missile; particle swarm optimization; constrained optimization; robustness
2016-05-03
張民(1973—),男,副研究員,博士。E-mail: zhangmin@nuaa.edu.cn
V249.122+.4
A
1000-1093(2017)01-0089-08
10.3969/j.issn.1000-1093.2017.01.012
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16