瓦特型六桿機構的簡化函數綜合法
2017-02-21 17:23:44孫永國冀文雨張庭杜明偉紀培國王
哈爾濱理工大學學報 2016年6期
孫永國 冀文雨 張庭 杜明偉 紀培國 王磊
摘要:針對瓦特型六桿機構優化困難的問題,基于六桿機構簡化函數綜合原理,采用層疊目標優化算法,對瓦特型六桿機構進行分析,建立數學模型,給出了優化算法流程,并進行了實例計算、仿真分析,結果表明層疊優化算法適用于求解瓦特型六桿機構,將六桿機構拆為四桿機構和二桿機構這種方法是可行的,仿真數據表明誤差控制在很0.4mm的范圍內,證實了該方法正確有效,為研究對六桿機構綜合提供了新的思路和方法。
關鍵詞:瓦特型六桿機構;簡化函數綜合;四桿機構;二桿機構;層疊優化算法
DOI:10.15938/j.jhust.2016.06.006
中圖分類號:THll2
文獻標志碼:A
文章編號:1007-2683(2016)06-0028-07
0.引言
瓦特型六桿機構是平面六桿機構的一個大類,在工程中具有重大的應用價值.應用瓦特型六桿機構的游梁式抽油機,輸出桿的擺角是原抽油機的4倍,使抽油機沖程大為增加,提高了其性能,由于平面六桿機構較四桿機構可實現更多的精確點,從而更好的滿足實際設計的需要.國內外許多學者對平面六桿機構函數綜合做了大量研究。
連桿機構簡化綜合的核心就是將多個設計參數分成少數的幾組分別進行綜合,借助計算機解算技術,將機構運動綜合問題歸結為求解多變量約束優化問題求解,目前國內對六桿機構的研究主要涉及的是史蒂芬森型六桿機構的研究,而對于瓦特型六桿機構的函數綜合的研究還不是很深入,康利君利用ADMAS仿真得到了瓦特型六連桿機構的運動情況,同時應用ANYSYS軟件對搖臂構件進行了模態分析。
楊捷將Matlab和數值解法運用在平面機構的設計及優化當中,提升了機構優化設計的速度和精確程度,潘敏介紹了四桿機構和六桿機構在焊裝家具中的應用,并簡化了夾具的結構。
陳平詳細的研究了平面連桿機構尺度綜合專家系統的主框架、知識庫和推理機,黃康對平面連桿機構計算機輔助設計系統進行了開發,對常用的平面連桿機構進行運動分析及綜合,張建軍將平面六桿機構間歇函數綜合優化模型的設計參數減少為4個,并建立了平面六桿機構間歇函數綜合的優化模型,并將求解問題轉化為鞍點規劃模型,利用BFGS方法和遺傳算法結合求解。
李景雷文提出的平面六桿雙間歇機構近似函數綜合思想,編制了一套平面六桿雙間歇機構近似函數綜合以及仿真軟件,并進行了實例計算,錢志良以主動曲柄和從動擺桿問的給定運動關系為基礎,通過引入二自由度五桿機構及其連桿鉸接點曲線,提出函數插值輪換綜合法。
隆飛通過調節連桿的位置來實現多函數的平面六桿瓦特型可調機構及其綜合方法,吳努提出了利用Roberts定理設計六連桿平動引導機構的思路,介紹了幾何解析法確定引導機構幾何尺寸的方法,傅偉成提出一種用于內燃機的新型曲柄連桿機構,建立了該機構的運動學數學模型,并編制了計算機程序。
蘇和平分析了安裝角、偏轉角、偏距對一種瓦特Ⅱ型機構的影響,韓建友給出了Watt-I型六桿機構尺寸綜合的一種新方法,該方法對于剛體有限分離問題通過建立機構解域,最終能夠得到滿足給定設計條件的全部可行解,但該方法求解復雜,計算時間較長。
本文將瓦特型六桿機構拆分為四桿機構和二桿機構,建立數學模型,提出層疊目標優化算法,用于求解給定問運動的平面六桿機構綜合問題,最終實現瓦特型六桿機構的簡化函數綜合。
1.瓦特型六桿機構綜合模型
1.1瓦特型六桿機構的機構類型
瓦特型六桿運動鏈是一種具有相鄰的三副桿的六桿轉動副運動鏈,也稱為Watt鏈,Watt型六桿機構的基本形式,如圖1示,以不同構件作為機架,可以得到兩種watt型六桿機構,即Watt-I型和watt-Ⅱ型,如圖2和3所示,限于篇幅,本文針對Watt-I型六桿機構進行分析。
1.2瓦特型六桿機構坐標
標定運動副節點的Watt-I型六桿機構,如圖2所示,以G點為坐標原點,建立x軸過A點的分析坐標系,如圖4所示,其中8個桿的長度分別為l1,l2,l3,l4,l4,l5,l6,l7,各桿件的水平夾角分別為α,βy,ε,θ,ξ,η。
1.3瓦特型六桿機構簡化模型
為建立瓦特型六桿機構簡化函數模型,將六桿機構拆分成一個四桿機構和一個二桿機構,如圖5(a)、(b)所示。
2.目標優化層疊算法
目標優化層疊算法是指針對一個系統問題,需要把系統問題拆分為多個部分求解,首先對第一次部分進行優化,以第一部分的優化結果為基礎再對系統問題的第二個部分進行優化,以此類推,直到完成系統問題最后部分的優化,最后判斷所有部分的優化結果是否滿足系統問題,滿足則優化結束,否則返回第一部分再次優化,直到滿足系統問題,如圖6所示:為瓦特型六桿機構的優化算法流程圖。
步驟1:初定四桿機構尺寸,設定其上、下限,通過E點實際值與計算值的函數關系建立目標函數,確定約束條件,優化四桿機構機構尺寸。
步驟2:由于ED桿長不變,D點運動軌跡與E點實際運動軌跡應該滿足固定肋,建立目標函數,確定約束條件,優化二桿機構尺寸。
步驟3:修訂六桿機構尺寸,當偏差足夠小,完成優化,否則重復上述步驟。
3.計算實例
垂直攪拌器結構,如圖7所示,為一鉸鏈六桿機構.當安裝于攪拌頭(被引導件)7上的手柄H向下運動時,鉸鏈中心D和E的運動軌跡分別為Kn和Ke當機構尺寸設計適當時,這兩軌跡在攪拌器工作范圍內近似直線且相互平行,因此,攪拌頭7作近似直線平動,當攪拌頭向下垂直運動到最下端,鉸鏈D、E、F分別到達D、E、F位置.彈簧用于手柄日上撤去外力后使攪拌頭回復至上端位置.構件4為機架,構件2和6均為連桿并分別與連桿1鉸接,連桿2還與連桿5鉸接,攪拌頭7分別與構件6和8鉸接于點D和E。
垂直攪拌器簡化圖,如圖8所示,其中4、G與地面相連,依據A、B、c、D、E、F、G對應位置關系以及各桿件之問的相對位置可知,該六桿機構可以轉化為Watt-I型六桿機構。
如圖4所示,為攪拌器轉化原理圖.以G點作為坐標原點,建立坐標系,由于點E、F、B在一個桿件上,桿EFB可以看作一個剛性構建,轉化為圖4中的陰影三角形EFB,同理桿ABC轉化為圖4中的陰影三角形ABC,D點分別與E、C點相連接。
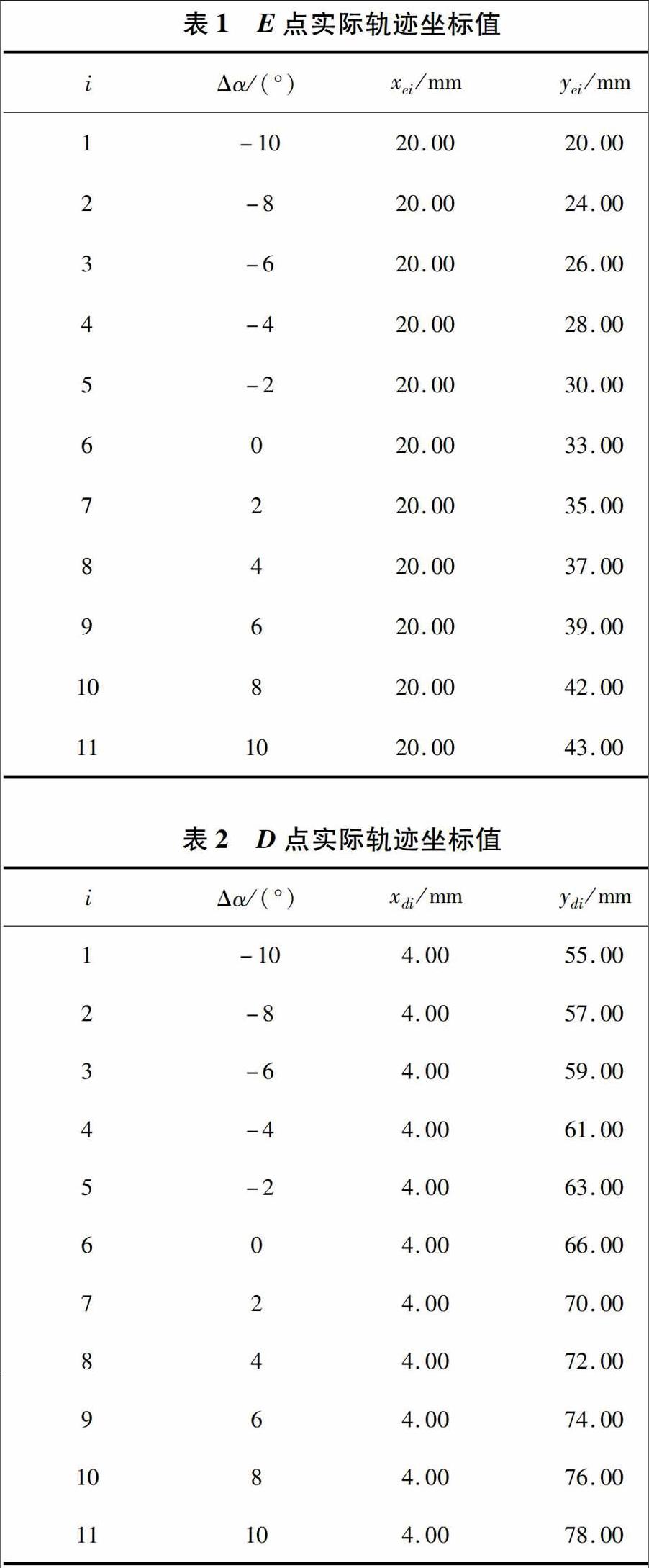
通過實際測量,可以獲得E、D兩點的實際坐標值.如表1所示,為E點實際軌跡坐標值,如表2所示,為D點實際軌跡坐標值。
依據本文提供的方法,將六桿機構拆分為四桿機構和二桿機構,采用目標優化層疊算法,首先對四桿機構進行優化,用Matlab編程,采用Matlab中fmincon函數。
[x,fval,exitflag,output]=fmincon(fun.X0,b,Aeq,beq,lb,ub)
其中fun為目標函數;XO為初始值,4、b滿足線性不等式約束,Aeq、beq滿足等式約束,lb、ub滿足邊界約束。
將式(11)、(12)、(13)代入fmincon函數,其中式(11)為目標函數,式(12)、(13)為約束條件。
編寫Matlab程序,并運行.優化結束以后得到四桿機構的初始桿長,以此為基礎對二桿機構進行優化,再次使用fmincon函數,將式(19)、(21)、(22)、(23)、(24)代入,fmincon函數中。
其中式(19)為目標函數,式(21)、(22)、(23)、(24)為約束條件。
再次編寫Matlab程序,并運行.優化后得到二桿機構的桿長,以得到的六桿機構的所有桿長為基礎對六桿機構進行總體優化。
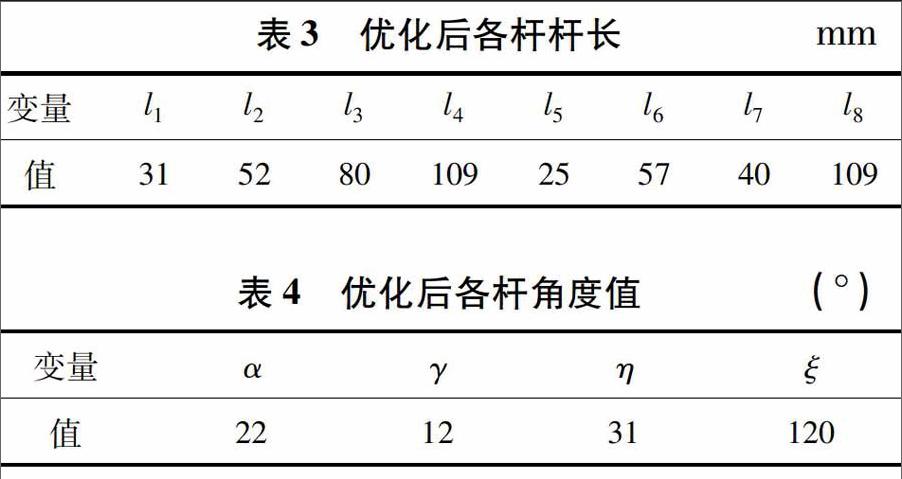
最終優化后得到的結果如表3、表4所示:
4.仿真分析
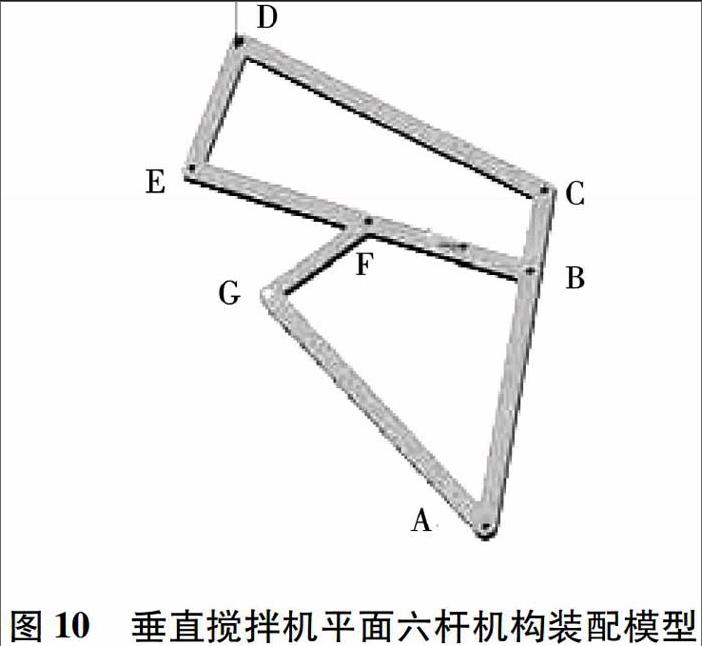
依據表3、表4得到的數據,運用proe繪制垂直攪拌機平面六桿機構并進行裝配,裝配圖如圖10所示。
AG桿與地面固定,在A、B、C、D、E、F、G點處添加轉動副,在G點處添加伺服電動機,GF桿為驅動軸,定義運動周期為3s,對機構進行運動學仿真,在E、D點處添加軌跡曲線,來測量E、D點的運動軌跡,分別測量E點x坐標、y坐標隨時問的變化曲線,D點x坐標、y坐標隨時問的變化曲線。
將E、D點的仿真數據與實際數據進行對比分析,可以得到圖13和圖14,由圖13、14可知D點仿真軌跡近似成一條直線,與實際軌跡近似平行,同時E點仿真軌跡近似成一條直線,與實際軌跡近似平行,由此可知六桿機構肋桿近似作垂直往復運動,從而實現了垂直攪拌機六桿機構的垂直往復運動。
由圖13、14可知E、D兩點在x軸方向存在擺動,最大擺動誤差為0.15mm.在Y軸方向與實際值變化趨勢一致,近似實現了E、D兩點的軌跡。
將E、D兩點的仿真值和實際值進行對比,建立表格,如表5、表6所示.在表5、表6中,△α(°)為桿1偏轉角度,△X和△y分別為D點在X軸和y軸方向的偏移誤差,(Xdi,ydi)為D點的實際值,(XDi,yDi)為D點的仿真值.同理(Xei,yei)為E點的仿真值,(Xei,yei)為E點的實際值,△X和△y,分別為E點在x軸和y軸方向的偏移誤差。
由表5可知在一個運動周期內,D點x軸方向產生的最大誤差為0.15mm,Y軸方向產生的最大誤差為0.30mm,誤差較小,隨著桿1偏轉角度的增大,D點的誤差呈增大的趨勢,在行程極限位置處最大。
由表6可知在一個運動周期內,E點x軸方向產生的最大誤差為0.15mm,y軸方向產生的最大誤差為0.32mm,誤差較小,隨著桿1偏轉角度的增大,E點的誤差呈增大的趨勢,在行程極限位置處最大.由表5、表6可知,E點和D點的誤傳變化趨勢一致。
5.結論
1)本文提出層疊目標優化算法求解瓦特型六桿機構的函數綜合算法,通過優化結果和仿真數據的對比分析表明,層疊目標優化算法用于求解六桿機構的函數綜合正確有效。
2)本文提出了將瓦特型六桿機構拆分為四桿機構和二桿機構的方法,首先對四桿機構進行優化,在此類基礎上優化二桿機構,最終實現六桿機構的優化,該方法減少了了優化過程中的未知變量,簡化了優化過程,可以簡單快速的實現瓦特型六桿機構的綜合。
3)實例仿真分析的誤差控制在0.4mm以內,近似實現了E、D點的垂直往復運動,證明本文提出的方法適用于求解瓦特型六桿機構優化問題,拓寬了瓦特型六桿機構函數綜合法。
