基于CAN總線的艦船推進監控系統
2017-02-23 13:25:53熊永坤王東陽
電子技術與軟件工程 2016年24期
關鍵詞:系統
熊永坤+王東陽
本文研究了一種基于CAN總線的艦船推進監控系統,該系統是由工業以太網和CAN總線構成的網絡控制系統,系統具有主推進系統控制、安全保護、監測信息顯示及報警功能。重點研究了系統網絡結構和系統軟件設計。
【關鍵詞】CAN 推進監控 系統
計算機技術的迅猛發展對船舶工業發展產生了極大的推動作用,尤其是網絡技術和現場總線技術對船舶自動化帶來了巨大的變革。現場總線監控系統將逐步取代傳統的集散式、分布式控制的艦船自動化監控系統。本文研究了一種基于CAN總線的艦船推進監控系統,該系統是由工業以太網和CAN總線構成的網絡控制系統,系統具有主推進系統控制、安全保護、監測信息顯示及報警功能。
1 CAN 總線的特點
CAN現場總線只具有物理層、數據鏈路層和應用層等3層網絡結構。它是一種多主總線,可掛接上百個節點,網絡上任意節點可隨時主動向其他節點發送信息;具有抗干擾能力強、速度快、容錯性好、數據傳輸可靠性高等特點,因此在船舶監控系統中得到了廣泛的應用。
2 系統構成
艦船推進監控系統主要由主推進控制分系統、安全保護分系統和監測報警分系統組成。
2.1 系統網絡結構
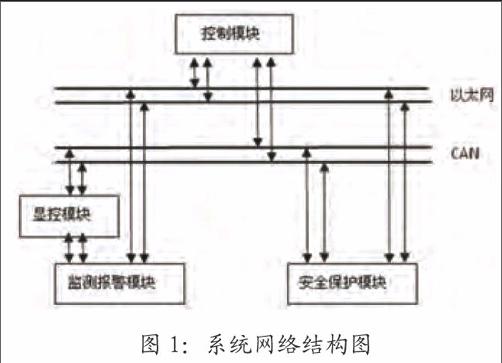
艦船推進監控系統網絡結構設計為兩層雙冗余網絡結構。上層為數據信息傳輸網,采用高速工業以太網;下層為實時數據采集網和實時控制網,采用CAN現場總線。為提高系統網絡通信的可靠性,上下兩層均采用雙冗余結構,可實現網絡故障切換和熱備份。在信號采集和控制方面, 基于CAN總線的主推進控制系統采用分布式布置, 達到信號就地采集, 就地控制的目的,提高了系統的可靠性。系統網絡結構圖如圖1所示。
2.2 主推進控制分系統
主推進系統由2臺主機、2臺齒輪箱和2套可調螺距槳( CCP)等組成, 為雙機雙槳推進系統。艦船左右兩舷各設一套控制系統,分別控制兩舷主推進系統,兩控制分系統相對獨立,功能相同。控制系統可以實現在駕駛室、機艙控制室和機旁控制站能對主推進系統實行3級控制,其中機旁控制優先于機艙控制,機艙控制優于駕駛室控制,三個控制站之間相互聯鎖,任何時刻只能一個控制站可操縱。
控制分系統可按三種控制方式實現對主推進裝置的控制:自動控制、半自動控制和手動控制。自動控制方式:控制分系統在不同的主推進系統運行模式下,按照預定的控制曲線自動控制主推進系統運行。半自動控制方式:控制分系統根據操作人員的指令自動控制主推進系統運行。手動控制方式:操作人員在機旁控制站可進行主機起停、調距槳螺距設定等操作。還可以通過軟件程序對主推進系統進行控制。
2.3 安全保護分系統
艦船左右兩舷各設一套安全保護分系統,分別保護兩舷主推進系統,兩安全保護分系統相對獨立,功能相同。安全保護分系統具有故障降速、故障停車的保護功能,不受操控站和控制方式限制。當出現故障時,安保分系統發出故障降速或故障停車信號,并發出聲光報警信號。
2.4 監測報警分系統
艦船機艙設置一套檢測報警分系統,由數據采集單元分別采集左右兩舷推進系統設備現場實時數據,通過下層CAN現場總線匯聚到顯控模塊,進行數據處理、監測報警、現場顯示等,并通過上層以太網與主推進工作站或其他系統交互數據信息。
3 系統軟件設計
系統軟件主要包括控制分系統、安全保護分系統和監測報警分系統等三個分系統軟件。
3.1 控制分系統軟件設計
控制分系統軟件主要包括遙控控制模塊、主機調速模塊、遙控操作顯示模塊等方面設計,對主推進系統進行主機的啟動、停車、轉速增減、離合器脫排等操作,通過輸出油門對主機進行調速控制。
3.2 安全保護分系統軟件設計
左右舷主推進裝置各設一套安全保護分系統,由安保控制模塊和安保頻率輸入模塊組成。
3.3 監測報警分系統設計
監測報警分系統主要是通過分布在主推進系統上的各個傳感器來實時監測系統的狀態,并傳回顯控模塊分析處理、顯示。監測報警分系統軟件顯控模塊人機界面主要實現數據處理和顯示、參數設定和修改、監測越線報警、數據記錄和打印等功能。
4 結束語
本文研究的基于CAN總線的艦船推進監控系統解決了傳統的集散式、分布式系統的缺點,提高了系統的抗干擾能力和數據傳輸可靠性能力,該系統切實可行,已在工程船舶上取得了良好的實際應用效果。
參考文獻
[1]張顯庫,任光,劉軍,趙衛軍.綜合船舶監控系統設計[J].中國造船,2002,43(02):71-80.
[2]張旭,李迪陽,孫建波等.船舶機艙監測報警系統[J].計算機工程與應用,2005(22):229-232.
[3]鄔寬明.CAN總線原理和應用系統設計[M].北京:北京航空航天大學出版社,1986:20-39,59-68,78-105.
[4]滿慶豐.CAN 總線的發展及應用[J].電子技術應用(刊),1994(12):38-41.
作者簡介
熊永坤(1984-),男,湖南省婁底市人。現為91404部隊工程師,從事綜合平臺管理系統研究。
作者單位
91404部隊 河北省秦皇島市 066200
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32